2 3 S 9
8 6
4 00 4
;о
29
16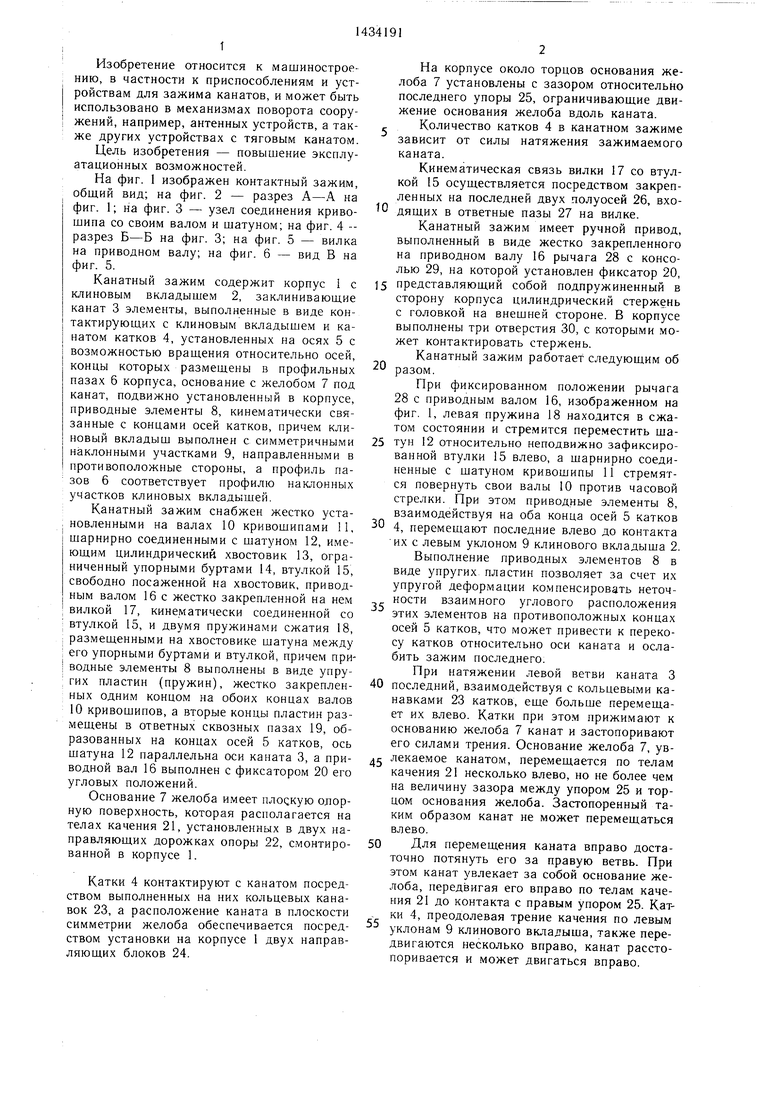

| название | год | авторы | номер документа |
|---|---|---|---|
| Канатный зажим | 1980 |
|
SU916815A1 |
| РЫЧАЖНАЯ ЛЕБЕДКА | 1994 |
|
RU2084396C1 |
| КАНАТНЫЙ ЗАЖИМ | 1994 |
|
RU2086830C1 |
| Пресс для двусторонней упрочняющей обработки изделий по наклонным краям отверстий | 1984 |
|
SU1199353A1 |
| Устройство для поперечной передачи проката с рольганга | 1983 |
|
SU1103917A1 |
| Предохранительное устройство для удерживания грузозахватного органа с тросовым подвесом | 1990 |
|
SU1782924A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| ДЛИННОХОДОВОЙ СТАНОК - КАЧАЛКА | 2014 |
|
RU2581256C2 |
| Манипулятор | 1991 |
|
SU1813620A1 |
| Устройство для подачи многослойного настила к вырубочному прессу | 1981 |
|
SU1036648A1 |

Изобретение относится к машиностроению, в частности к устройствам для зажима канатов, и м.б. использовано, например, в механизмах с тяговым канатом. Цель - снижение материалоемкости и повышение удобства эксплуатации канатного зажима, применяемого в регулируемых системах на канатных подвесках. При фиксированном положении рычага 28 с приводным валом 16 левая пружина 18 находится в сжатом состоянии и стремится переместить шатун 12 относительно неподвижно зафиксированной втулки 15 влево. Шарнирно соединенные с шатуном кривошипы 11 стремятся повернуть свои валы 10 против часовой стрелки. Приводные элементы 8, воздействуя на оба конца осей 5 катков 4, перемещают последние влево до контакта их с поверхностью клинового вкладыша 2. При натяжении левой ветви каната 3 последний, взаимодействуя с кольцевыми канавками катков, еще больше перемещает их влево. Катки при этом прижимают к желобу 7 основания канат и застопоривают его силами трения 6 ил. I (П
фае. /
Изобретение относится к машиностроению, в частности к приспособлениям и устройствам для зажима канатов, и может быть использовано в механизмах поворота сооружений, например, антенных устройств, а также других устройствах с тяговым канатом. Цель изобретения - повышение эксплуатационных возможностей.
На фиг. 1 изображен контактный зажим, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - узел соединения кривошипа со своим валом и шатуном; на фиг. 4 -- разрез Б-Б на фиг. 3; на фиг. 5 - вилка на приводном валу; на фиг. 6 - вид В на фиг. 5.
Канатный зажим содержит корпус 1 с клиновым вкладышем 2, заклинивающие канат 3 элементы, выполненные в виде кон- тактируюш,их с клиновым вкладышем и ка- нато.м катков 4, установленных на осях 5 с возможностью вращения относительно осей, концы которых размещены в профильных пазах 6 корпуса, основание с желобом 7 под канат, подвижно установленный в корпусе, приводные элементы 8, кинематически связанные с концами осей катков, причем кли- новый вкладыш выполнен с сим.метричными наклонными участками 9, направленными в противоположные стороны, а профиль пазов 6 соответствует профилю наклонных участков клиновых вкладышей.
Канатный зажим снабжен жестко установленными на валах 10 кривошипами 11, шарнирно соединенными с шатуном 12, имеющим цилиндрический хвостовик 13, ограниченный упорными буртами 14, втулкой 15, свободно посаженной на хвостовик, приводным валом 16 с жестко закрепленной на нем вилкой 17, кинематически соединенной со втулкой 15, и двумя пружинами сжатия 18, размешенными на хвостовике шатуна между его упорными буртами и втулкой, причем приводные элементы 8 выполнены в виде упругих пластин (пружин), жестко закрепленных одним концом на обоих концах валов 10 кривошипов, а вторые концы пластин размещены в ответных сквозных пазах 19, образованных на концах осей 5 катков, ось шатуна 12 параллельна оси каната 3, а приводной вал 16 выполнен с фиксатором 20 его угловых положений.
Основание 7 желоба имеет плоскую олор- ную поверхность, которая располагается на телах качения 21, установленных в двух направляющих дорожках опоры 22, смонтированной в корпусе 1.
Катки 4 контактируют с канатом посредством выполненных на них кольцевых канавок 23, а расположение каната в плоскости симметрии желоба обеспечивается посредством установки на корпусе 1 двух направляющих блоков 24.
0
5
0
5
0
5
0
5
0
5
На корпусе около торцов основания желоба 7 установлены с зазором относительно последнего упоры 25, ограничивающие движение основания желоба вдоль каната.
Количество катков 4 в канатном зажиме зависит от силы натяжения зажимаемого каната.
Кинематическая связь вилки 17 со втулкой 15 осуществляется посредством закрепленных на последней двух полуосей 26, входящих в ответные пазы 27 на вилке.
Канатный зажим имеет ручной привод, выполненный в виде жестко закрепленного на приводном валу 16 рычага 28 с консолью 29, на которой установлен фиксатор 20, представляющий собой подпружиненный в сторону корпуса цилиндрический стержень с головкой на внешней стороне. В корпусе выполнены три отверстия 30, с которыми может контактировать стержень.
Канатный зажим работает следующим об разом.
При фиксированном положении рычага 28 с приводным валом 16, изображенном на фиг. 1, левая пружина 18 находится в сжатом состоянии и стремится пере.местить ща- тун 12 относительно неподвижно зафиксированной втулки 15 влево, а шарнирно соединенные с шатуном кривошипы 11 стремятся повернуть свои валы 10 против часовой стрелки. При этом приводные элементы 8, взаимодействуя на оба конца осей 5 катков 4, перемешают последние влево до контакта ИХ с левым уклоном 9 клинового вкладыша 2.
Выполнение приводных элементов 8 в виде упругих, пластин позволяет за счет их упругой деформации компенсировать неточности взаимного углового расположения этих элементов на противоположных концах осей 5 катков, что может привести к перекосу катков относительно оси каната и ослабить зажим последнего.
При натяжении левой ветви каната 3 последний, взаимодействуя с кольцевыми канавками 23 катков, еще больше перемещает их влево. Катки при этом прижимают к основанию желоба 7 канат и застопоривают его силами трения. Основание желоба 7, увлекаемое канатом, перемещается по телам качения 21 несколько влево, но не более чем на величину зазора между упором 25 и торцом основания желоба. 13астопоренный таким образом канат не может перемещаться влево.
Для перемещения каната вправо достаточно потянуть его за правую ветвь. При этом канат увлекает за собой основание желоба, передвигая его вправо по телам качения 21 до контакта с правым упором 25. Катки 4, преодолевая трение качения по левым уклонам 9 клинового вкладыша, также передвигаются несколько вправо, канат рассто- поривается и может двигаться вправо.
Для расстопоривания каната от перемещения в любую сторону необходимо потянуть в направлении от корпуса 1 фиксатор 20 до выхода конца его стержня из отверстия 30 в корпусе 1 и одновременно повернуть s рычаг 28 по часовой стрелке так, чтобы конец стержня фиксатора попал в среднее отверстие 30, при этом приводной вал 16с рычагом 28 занимают второе фиксированное
Использование предложенного канатного зажима по сравнению с прототипом позволяет за счет снабжения его общим для всех катков приводным механизмом (шатуном с кривошипами и общим приводным валом) снизить его металлоемкость и повысить удобство его эксплуатации. Кроме того, благодаря наличию приводного вала, последний может быть соединен с электроприппт,м.о г - ........„„„„v..1ч.дг,п„ ми/лс иы1ь соединен с электроприположение. Одновременно с поворотом что позволяет осуществлять дистанчага по часовой стрелке поворачивается за-ционное управление канатным зажимом
крепленная на приводном валу 16 вилка .
и передвигает по хвостовику 13 щатуна втул-Формула изобретения
ку 15 вправо, при этом левая пружина 18Канатный зажим, содержащий корпус с
освобождается на нагрузки, а щатун 12, кри-профильными пазами, жестко закрепленный
вошипы 11 и приводные элементы 8 не ока-15 в нем клиновой вкладыщ с симметричными
зывают силового воздействия на катки 4 инаправленными в противоположные стороны
канатный зажим оказывается в расстопо-наклонными поверхностями, заклинивающие
ренном состоянии.катки, установленные с возможностью враДля удержания каната от движения впра-щения на осях, концы которых свободно пазво необходимо освободить фиксатор 20 и мещены в профильных пазах корпуса и свявепнуть сычаг 28 по цягпппй гтп(апг1. о .тоо,,,, « ..
вернуть рычаг 28 по часовой стрелке, чтобы конец фиксатора попал в крайнее верхнее отверстие 30, при этом приводной вал 16 с рычагом занимают третье фиксированное положение. Одновременно с рычагом поворазаны с приводными элементами, продольно- подвижное относительно корпуса основание с желобом под зажимаемый канат, отличающийся тем, что, с целью улучшения эксплуатационных возможностей, он снабжен устаviv y,v,ir,. .n JDjjcivicnnu С рычагом поворачиваетсявтужесторонувилка 17ипередви-25 новленными в корпусе валами с кривошигает по хвостовику шатуна втулку 15 в край-пами, шатуном, выполненным с цилиндричеснее правое положение. Правая пружина 18ким участком, ограниченным буртами и шароказывается в сжатом состоянии и переме-мирно соединенным с кривошипами втулкой
шает шатун 12 относительно неподвижнорасположенной на цилиндрическом участзафиксированной втулки 15 вправо, а сое-зо ке шатуна и подпружиненной относительно
диненные с шатуном кривошипы 11 повора-буртов, установленным в корпусе приводным
чивают свои валы 10 по часовой стрелке.валом с фиксатором его углового положения
При этом приводные элементы 8 перемеща-
ют катки вправо до контакта их с правыми
уклонами 9 клинового вкладыша 2.
и вилкой, жестко закрепленной на приводном валу и кинематически соединенной с втулп , приводные элементы выполнены в виде
При натяжении правой ветви каната про- 35упругих пластин, одни концы которых жестисходит окончательное заклинивание его вко закреплены на обоих концах валов кривозажиме, а основание желоба перемещаетсяшипов, а другие свободно размещены в выпо телам качения 21 вправо, но не болееполненных в осях катков диаметральных пачем на величину зазора между правым упо-зах, ось шатуна параллельна оси желоба
ром 2Ь и торцом основания желоба. Засто- .„а форма профильных пазов корпуса соотпоренныи таким образом канат не может пе- ветствует форме наклонных участков клиремещаться вправо. нового вкладыша
If 2 2Ъ А-АJ 7
,/ /
Использование предложенного канатного зажима по сравнению с прототипом позволяет за счет снабжения его общим для всех катков приводным механизмом (шатуном с кривошипами и общим приводным валом) снизить его металлоемкость и повысить удобство его эксплуатации. Кроме того, благодаря наличию приводного вала, последний может быть соединен с электропри.1ч.дг,п„ ми/лс иы1ь соединен с электропри о ом- что позволяет осуществлять дистанмещены в профильных пазах корпуса и свяоо,,,, « ..
заны с приводными элементами, продольно- подвижное относительно корпуса основание с желобом под зажимаемый канат, отличающийся тем, что, с целью улучшения эксплуатационных возможностей, он снабжен установленными в корпусе валами с кривошиФиг.5
б б
Фиг.1
дидВ
21
11
Фиг. 6
| Зажим для каната | 1983 |
|
SU1147877A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Канатный зажим | 1980 |
|
SU916815A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
