Изобретение относится к автоматике и вычислительной технике, в частности к системам программного управления станками.
Цель изобретения - повышение точности и быстродействия устройства.
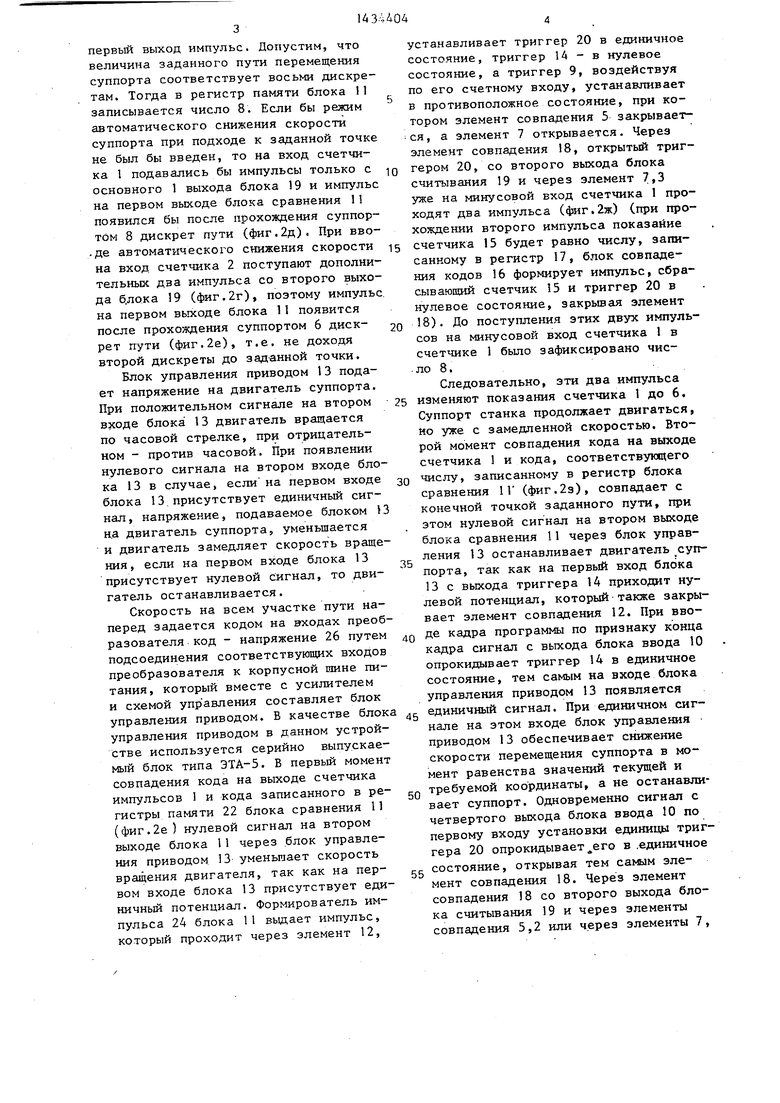
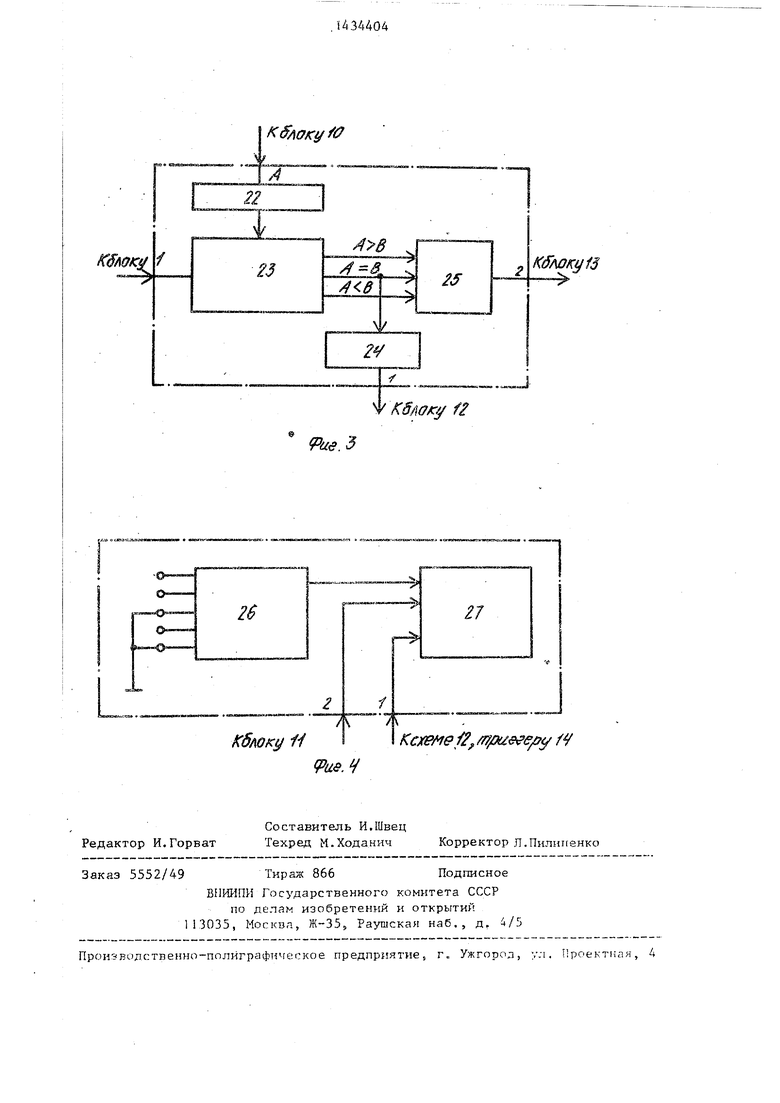
На фиг,1 представлена функциональ ная схема устройства цифрового программного управления; на фиг,2 - временная диаграмма; на фиг.З - пример выполнения блока сравнения; на фиг.4- блок управления приводом.
Устройство содерлсит реверсивный счетчик импульсов 1, два элемента ИЛИ 2,3, элементы совпадения ,4-7, триггеры 8 и 9, блок ввода 10, блок сравнения 11, элемент совпадения 12, блок управления приводом 13, триггер 14, счетчик, импульсов 15, блок совпа дения кодов 16, регистр памяти 17, элемент совпадения 18, блок считывания 59, RS-триггер 20, выход 21 блока 13, Блок сравнения 11 состоит из регистра памяти 22,.схемы сравнения кодов 23, формирователя импульсов 24 транзисторных ключей 25. Блок управления приводом 13 состоит из преобразователя код - напряжение 26, усили- т еля 27.
Устройство работает следующим образом.
В исходном положении при включении напряжения питания счетчики импульсов 1, 15 устанавливаются в нулевое состояние..С выходов блока ввода 10 поступает информация о направлении движения суппорта, при этом триг- геры 8 и 9 устанавливаются в прямое или инверсное состояние, с выхода 3 0величине участка замедления, которая записывается в регистр памяти 17 с выхода 5-0 величине заданного перемещения, которая записывается в регистр памяти блока сравнения 1I.
В зависимости от заданного направления перемещения суппорта триггеры В и 9 сигналами с первого или второго выходов блока ввода 10 устанавливаются в состояние, при котором обеспечивается прохождение импульсов с первого выхода блока считывания 19 через элемент совпадения 4 и элемент 2 или через элемент совпадения 6 и элемент 3 либо на вход сложения, либо на вход вычитания реверсивного счетчика импульсов К Блок сравнения
11 сравнивает информацию о требуемой координатеS которая поступает с выхо
10
15
20
25
.30
35
40
45
50
55
да блока ввода 10, и информацию о текущей координате, которая поступает с выхода реверсивного счетчика 1 и по результату сравнения формирует сигналы, которые через блок управле- 1ШЯ приводом 13 заставляют перемещаться суппорт станка в ту или иную сторону. При равенстве значений текущей и требуемой координаты суппорт останавливается.
Допустим, что в программоносителе записано, что суппорт должен двигаться в направлении от оператора, тогда триггеры 8 и 9 установятся в единичное состояние, т.е. элементы 4 и 5 будут открыты, а элементы 6 и 7 закрыты. Блок считывания 19 представляет из себя кмпульснь Й датчик, жестко механически связанный с суппортом станка, который при движении суппорта выдает с основного выхода и вспомогательного выхода им.пульсы. Каждый импульс с основного выхода соответствует одной дискрета пройденного суппортом пути. Импульсы со второго выхода сдвинуты по фазе относительно импульсов с основного выхода и имеют в 3 раза большую частоту. Примерогч такого датчика может служить серийно выпускаемый фотоимпульсный датчик типа ВЕ-178. Импульсы с первого выхода блока 19 (фиг.2а), пройдя через элементы совпадения 4 и 2, поступают на плюсовой вход реверсивного счетчика 1. Импульсы со второго выхода блока 19 (фиг.26), пройдя через элементы совпадения 18,5, также поступают на плюсовой вход счетчика импульса 1. Допустим, что величина участка замедления соответствует двум дискретам. Тогда в регистр памяти 17 записывается число 2. Импульсы со второго выхода блока 9, пройдя через элемент совпадения 18 (фиг.2в), также подсчитываются счетчиком 15. Когда на вход счетчика импульсов 15 поступают два импульса, код на выходе счетчика 15 равен коду на вькоде регистра памяти 17 и блок совпадения кодов 16 вьщает сигнал, который устанавливает счетчик 15 и триггер 20 в нулевое состояние, закрывая - элемент совпадения 18 и запрещая тем самым прохождение импульсов со второго выхода блока 19. Когда число импульсов, подсчитанное счетчлком 1, будет равно числу, записанному в регистр блока сравнения 1, формирователь блока 11 выдает на его
первый выход импульс. Допустим, что величина заданного пути перемещения суппорта соответствует восьми дискретам. Тогда в регистр памяти блока 11 записывается число 8. Если бы режим автоматического снижения скорости суппорта при подходе к заданной точке не был бы введен, то на вход счетчика 1 подавались бы импульсы только с основного 1 выхода блока 19 и импульс на первом выходе блока сравнения 1 появился бы после прохоткдения суппортом 8 дискрет пути (фиг,2д). При вво- .де автоматического снижения скорости на вход счетчика 2 поступают дополнительных два импульса со второго выхода б,лока 19 (фиг.2г), поэтому импульс на первом вьпсоде блока 11 появится после прохождения суппортом 6 дискрет пути (фиг.2е), т.е. не доходя второй дискреты до зад-анной точки.
Блок управления приводом 13 подает напряжение на двигатель суппорта. При положительном сигнале на втором входе блока 13 двигатель вращается по часовой стрелке, при отрицательном - против часовой. При появлении нулевого сигнала на втором входе блока 13 в случае, если на первом входе блока 13,присутствует единичный сигнал, напряжение, подаваемое блоком 13 н.а двигатель суппорта, уменьшается и двигатель замедляет скорость вращения , если на первом входе блока 13 присутствует нулевой Сигнал, то двигатель останавливается.
Скорость на всем участке пути наперед задается кодом на входах преобразователя код - напряжение 26 путем подсоединения соответствующих входов преобразователя к корпусной шине питания, который вместе с усилителем и схемой упр авления составляет блок управления приводом. В качестве блок управления приводом в данном устройстве используется серийно выпускаемый блок типа ЭТА-5. В первый момент совпадения кода на выходе счетчика импульсов и кода записанного в регистры памяти 22 блока сравнения П (фиг.2е) нулевой сигнал на втором выходе блока 11 через блок управления приводом 13 уменьшает скорость вращения двигателя, так как на первом входе блока 13 присутствует единичный потенциал. Формирователь импульса 24 блока 11 выдает импульс, который проходит через элемент 12,
устанавливает триггер 20 в единичное состояние, триггер 14 - в нулевое состояние, а триггер 9, воздействуя по его счетному входу, устанавливает в противоположное состояние, при котором элемент совпадения 5 закрывает- ;ся, а элемент 7 открывается. Через элемент совпадения 18, открытый триггером 20, со второго вькода блока считывания 19 и через элемент 7,3 уже на минусовой вход счетчика 1 проходят два импульса (фиг.2ж) (при прохождении второго импульса показание
счетчика 15 будет равно числу, записанному в регистр 17, блок совпадения кодов 16 формирует импульс, сбрасывающий счетчик 15 и триггер 20 в нулевое состояние, закрьшая элемент
18). До поступления этих двух импульсов на минусовой вход счетчика 1 в счетчике 1 было зафиксировано чис- ло 8.
Следовательно, эти два импульса
изменяют показания счетчика 1 до 6. Суппорт станка продолжает двигаться, йо уже с замедленной скоростью. Второй момент совпадения кода на выходе счетчика 1 и кода, соответствующего
числу, записанному в регистр блока сравнения 1Г (фиг.2з), совпадает с конечной точкой заданного пути, при этом нулевой сигнал на втором выходе блока сравнения 11 через блок управления 13 останавливает двигатель суппорта, так как на первый вход блока 13 с выхода триггера 14 приходит нулевой потенциал, которыйтакже закрывает элемент совпадения 12. При вводе кадра программы по признаку конца кадра сигнал с выхода блока ввода 10 опрокидывает триггер 14 в единичное состояние, тем самым на входе блока управления приводом 13 появляется
единичный сигнал. При единичном сигнале на этом входе блок управления приводом 13 обеспечивает снижение скорости перемещения суппорта в момент равенства значений текущей и
требуемой координаты, а не останавливает суппорт. Одновременно сигнал с четвертого выхода блока ввода 10 по первому входу установки единицы триггера 20 опрокидывает,его в .единичное
состояние, открывая тем самым элемент совпадения 18. Через элемент совпадения 18 со второго выхода блока считывания 19 и через элементы совпадения 5,2 или через элементы 7,
3 в зависимости от направления пере- .мещения суппорта проходят импульсы на тот вход реверсивного счетчика 1, на который приводят рабочие импульсы с первого выхода блока считывания. 19. ,Импульсы со второго выхода блока 19 разнесены по времени относительно рабочих импульсов с первого выхода и не совпадают с ними. Импульсы со вто- рого вьшода блока 19 также подсчиты- ваются счетчиком 15. При совпадении кода счетчика 15 и кода регистра памяти 17s в который записывается с третьего выхода блока ввода 0 число, соответствующее пути, который ,должен пройти суппорт с замедленной скоростью j блок совпадения кодов 16 формирует сигнал, сбрасывающий счетчик 15 и триггер 20 в нулевое состояние, закрывая элемент совпадения 18. Так как на один из входов реверсивного счетчика поступают и.рабочие импульсы при перемещении суппорта с первого выхода блока считывания 19 и им- пульсы со второго выхода блока 19, то момент, когда текущая координата будет равна заданной, происходит раньше на величину, соответствующую пути.
который должен пройти суппорт с за
медленной скоростью. В момент равенства значений текущей и заданной координаты блок управленияприводом i 3 обеспечивает снижение скорости суппорта, так-как на его первом входе присутствует единичньш потенциал. Да- лее сигнал с первого выхода блока сравнения П, пройдя через элемент совпадения 12, опрокидывает триггер .3 по его счетному входу в состояние, противоположное предыдущему, триггер 20 по второму входу установки единицы 3 единичное состояние, открывая элемент 18 и триггер 14 в нулевое сое тояние, закрьшая злейент совпадения
12, Через элемент совпадения 18 со второго выхода блока считывания 19 уже на другой вход реверсивного счетчика приходят импульсы, число которых, благодаря работе блоков 15 17 соответствует пути замедленного движения суппорта. Эти импульсы смещают текущей координаты на величину пути замедления, При следующем моменте совпадения значений текущей и заданной координаты блок управления приводом 13 останавливает суппорт, так как на его первом входе присутствует нулевой потенциал.
Q 5 5
0
0
0
5
0
5
Формула изобретения Устройство, для цифрового программного управления, содержащее блок считывания, реверсивный счетчик импульсов, выход которого соединен с первым входом блока сравнения, второй -вход блока сравнения подключен к первому выходу блока ввода, а выход - к первому входу блока управления приводом, отличающееся тем, что, с целью повышения точности и быстродействия, в устройство введены регистр памяти, счетчик импульсов, четыре триггера, -блок совпадения кодов, первый и второй элементы ИЛИ и шесть элементов совпадения, выходы первого и второго элементов ИЛИ подключены соответственно к первому и второму входам реверсивного счетчика импульсов, первый вход первого элемента ИЛИ соединен с выходом первого элемента совпадения, второй вход - с выходом второго элемента совпадения, первый вход второго элемента ИЛИ подкп очек к выходу третьего элемента совпадения, второй вход - к выходу четвертого элемента совпадения, первый вход которого с Первым входом второго элемента совпадения, с выходом пятого элемента совпадения и первым входом счетчика импульсов, второй вход которого под- 1слючен к выходу блока совпадения кодов и первому входу первого триггера, второй вход которого подключен к третьему входу первого триггера, к первому входу третьего триггера и выходу шестого элемента совпадения, первый вход которого соединен с вторым выходом блока сравнения, второй вход - с выходом второго триггера и вторым входом блока управления приводом, третий выход блока ввода подключен к входу регистра памяти, выход которого соединен с первым входом блока совпадения кодов, второй вход которого подключен к вькоду счетчика им- пульсов, четвертый выход блока ввода соединен с первым входом третьего и четвертого триггера, пятьй выход - с третьим входом третьего и вторым входом четвертого триггеров, выход первого триггера соединен с первым входом первого элемента совпадения, второй вход которого подключен к первому выходу блока считывания, второй выход которого подключен к первому входу первого и третьего элементов
совпадения, второй вход первого элемента совпадения подключен к первому выходу четвертого триггера, второй выход KOTOpoi o соединен с вторым вхо- дом третьего элемента совпадения,первый выход третьего триггера подклю- чен к второму входу второго элемента совпадения, второй выход третьего триггера соединен с вторым входом четвертого элемента совпадения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления станком | 1979 |
|
SU930261A1 |
| Устройство для дробления стружки на станках с программным управлением | 1982 |
|
SU1072001A1 |
| Устройство для адаптивного программного управления металлорежущими станками | 1980 |
|
SU964581A1 |
| Устройство для сопряжения вычислительной машины с каналом связи | 1985 |
|
SU1291994A1 |
| Устройство для позиционного программного управления с самоконтролем | 1982 |
|
SU1072002A1 |
| Устройство для управления токарнымСТАНКОМ | 1979 |
|
SU830314A1 |
| Устройство для программного управления станком | 1985 |
|
SU1308986A1 |
| Генератор случайного процесса | 1986 |
|
SU1436113A1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1269092A1 |
| Устройство циклового фазирования аппаратуры передачи дискретной информации | 1989 |
|
SU1626432A1 |
Изобретение относится к автоматике и вычислительной технике, в частности к системам программного управления станками. Цель изобретения - повышение точности и быстродействия работы устройства за счет автоматического снижения скорости перемещения суппорта станка при подходе к заданной точке позиционирования. Цель достигается путем введения в устройство шести элементов совпадения, двух элементов ИЛИ, регистра памяти и блока совпадения кодов. Данное решение позволяет увеличить точность выхода суппорта станка в заданную точку при больших скоростях перемещений за счет снижения скорости на некотором участке пути, что уменьшает брак при изготовлении деталей, а также увеличить быстродействие, так как величина участка замедления в устройстве может меняться, выбираться оптимальной в зависимости от массы суппорта и первоначальной скорости его движения. 4 ил. Ш
г I I I I I I I ч I I I I I I I I I I I I I I I
г I . I I
Рие.г
Puff.3
кбмку a
г. У
fl
KcxeM&u ff/pu e/fy /f
| УСТРОЙСТВО ЦИФРОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ | 0 |
|
SU327449A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Счетно-импульсная система программного управления для металлообрабатывающих станков | 1972 |
|
SU439789A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
