Изобретение огнасится к области дискретных систем aeTOLMaTHHeiOKoro управления.
Известны устройства цифрового строграммн-ого yinipaiBJieniHH, садержащие лентопротяжный мехаи изм, блок считы,вания и контроля пропраммы, блок памяти, блок управления, интерлолятор, шаговые |Д1ВИгатели для автоматического /программного леремещения управляемого мехаииэма, схемы управления шаловыМ1и .дв1Игателя1МИ с датчиками, преобразователи 1И 1сумМатор.
Цель изобретения - .повышение точности и надежиостиработы устройства.
Цель достигается тем, что в предлагаемом устройстве блок счйтьивамия и коитроля прогрнммы соединен с блоком памяти, вьиполненньгм .на регистрах, выход памяти подключен ко 1ВХОДУ интерполятора, оди1н выход которого соединен с блоком управлеиия, а другие через шаговые двигатели - с пол«оразрядны-ми |датчика1М и .айсолю пных 3(Начен.ий текущих коордииат мехаиизма, выходы датчиков через электронные преоб-разователИ подклю-чены к алгебраическому сумматору, од(Ин ,выхо1Д которого соединен ic выходным репистром блока памяти, а другой - со входо м блока управления, подключенного ко входу блока памяти.
гаемого устройства цифрового программного управления.
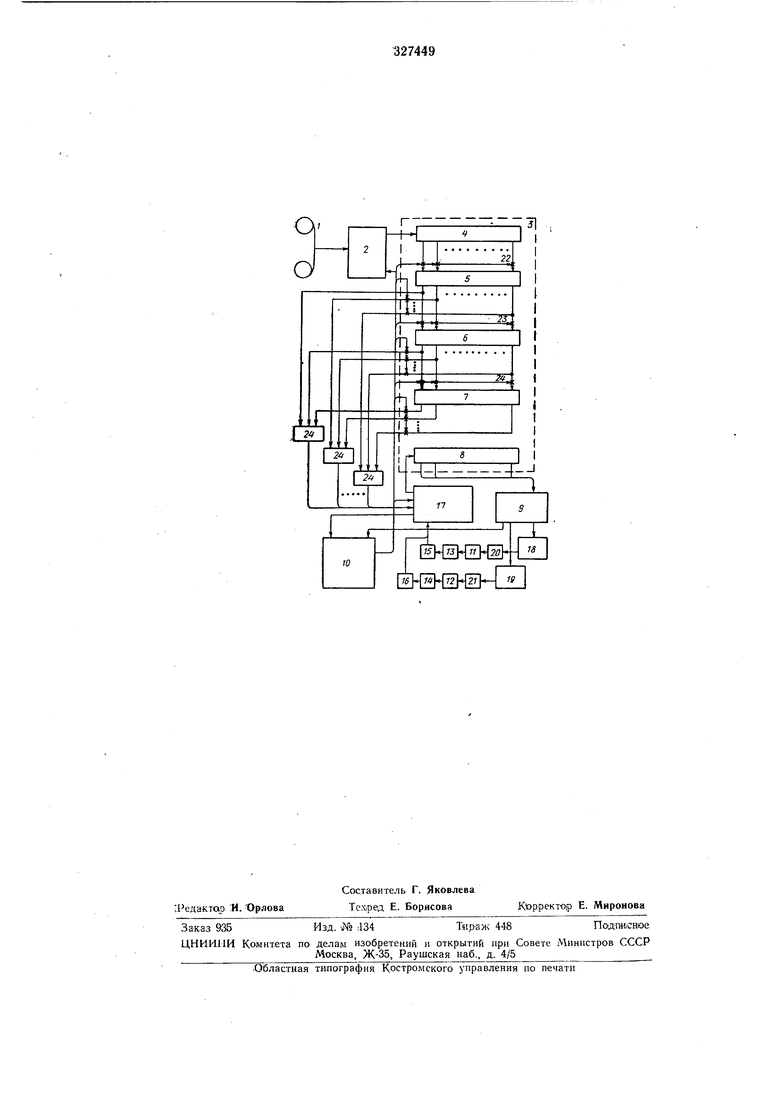
стройсрво содержит лентопротяжный механизм 1, соединенный через блок считьчваиия
и контроля програММы 2 с блокам памяти 3, вьгполНвниым на регистрах 4-8; «нтерполятор 9, один ВЫХОД которого соединен с блоком управления -Ю; ша-гавые двигатели //, 12, связанные с полноразрядньими датчиками 13,
14 абсолютных эначеНИЙ текущих координат механизма, тодключен-ньгми к электронным преоб|разователя1м кодов 15, 16. Выходы последних соединены с алгебраическим сумматором .17 значений координат, связанным с
выходным регистром 8 блока памяти.
Сигнал «3 блока управления 10 ,в1клк чает лентаоротяжный мехамиэм, и информация кадра контролируется в блоке (считывания и контроля-2. Выключение лентопротяжного механизма (Происходит по коду канца кадра, далее информация кадра поступает в регистр 4 блока памяти 3 ряда последовательных текущкх значений «оордннат. Одновременно со оч итывавдием информации (п+1)-го кадра с
перфоленты и записью IB регистр 4 идет отработка перемещения электрода ПО заданной П|ря1мой (кривой) IB п-ую заданную точку, координаты (Которой за1писа1ны в регистре 5. В регистрах 6 и 7 храмятся соответственно коора регистры 5 к 8 предназначены для хранения значейия разности задаиной м текущей TOMRIH, Определяемого алгебраическим юум.матороад 10. Последний В течение -всего времени работы сравнивает, равны ли задаиные координаты точек текущим. В случае равенства блок унравления // дает команду пе1ре писи информации ИЗ регистра 6 в регистр 7, затем из регистра 5 в регистр 6 и из регистра 4 в регистр 5, а также ситаал включения лентопротяжного механизма для считывай и я (п+2)-го кадра и записи его информащии в регистр 4. По заДанной информации в perHciipe 5 и текущим «оординатам, лолученным с кодообразователей поЛНОразрядиых датчиков положений, вычисляются следующие разности то каждой из координат, 1и новое значение нриращения записывается в регистр 8, откуда информация поступает на интерполятор 9, служащий для получения унитарного кода.
По щинам отбора унитарный код поступает на блоки 18, 19 управления щаговылли двигателям1и соотвегствуюЩИХ (Координат и далее через СВО.и уаилители 20, 21 на щатавые двитатели 11, 12. В случае понил ения напряжения на межэлекгродном 1Промежутке ниже допустимого, т. е. лри коротком амыкании электрОлТ.ав, .по сигналу из блока управления 10 -вентили груплы 22 закрываются и открываются вентили груПны 23.
Из регистра 6 инфор: гация координат пройденной точки через группу сборок 24 попадает в сумматор J7, значепие координат текущей точки онимается с полноразрядных датчиков положения /, 14, a-i через .преобразователи 15, 16 ко-ды попадают на ,вход алгебраичйского сум:матора 77, где вычисляются приращения 100 значком, |Как разность координат текущей И пройданной точек; «приращение записывается в регистр 8, откуда информация поступает на интерполятор; далее по унитарному коду, с учетом знака .приращения, ийет отработка в обратную сторону. Если отвод электрода в точку с координатами, записанными в регистре 5, недостаточен (т. е. короткое замыкание не устранилось), то считываются координаты предыдущей точки, информация с которой хранится в регистре 7. После устранения короткого замыкания электрод по этому же пути возВ1ращается щ точку, где произошло короткое замыкаете, июпользуя информацию координат точек, хранящихся в регистрах 6 и 5, и далее двигаетсясогласно програ-мме, записаиной на перфоленте.
П р е д .VI е т и з обре тения
Устройство цифрового програм-.много упра.вления, 1содержащее лентопротяжный механиэм, блок считывания и контроля программы, блок памяти, блок управления, интерполятор, щаговые двигатели для автоматического opo-npa.MiMHoro перемещения управляемого механизма, схемы управления шаговыми двигателями, датчиками, преобразователи и сумматор, отличающееся тем, что, с целью повышения точности и надежности работы устройства, блок считывания и контроля програ-ммы соединен с блоком па .мяти, выполненньг.м на регистрах, выход блока памяти подключен ко входу интерполятора, один выход которого соединен с блоком управления, а другие через шаговые двигатели -- с поляоразрядными датчиками абсолютных значений текущих коор.динат мехаииз-ма, выходы датчиков через электронные преабразователи подключены к алгебр аическому сумматору, один выход которого соединен с выходным регистром блока памяти, а другой - со входом блока управления, подключенного, ко входу блока памяти.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство для программного управления | 1985 |
|
SU1249482A1 |
| Устройство стабилизации скорости резания для токарных станков с ЧПУ | 1983 |
|
SU1136112A1 |
| Устройство для программного управления электроприводом | 1985 |
|
SU1260919A1 |
| Устройство для программного управления | 1982 |
|
SU1108392A1 |
| Устройство стабилизации скорости резания для токарно-винтовых станков с числовым программным управлением | 1983 |
|
SU1180845A1 |
| Устройство программного управления | 1984 |
|
SU1246055A1 |