20
00 ел 4 ND
СО
Изобретение относится к машиностроению и может быть использовано в конструкциях захватных органов роботов манипуляторов.
Цель изобретения - увеличение надежности и повышение грузоподъемности захва- та за счет выполнения источника разрежения в виде двух источников - источника предварительного и источника рабочего разрежения.
На чертеже изображен вакуумный за- .хват, общий вид.
3axfiaT содержит корпус 1, установленный )а руке 2 промышленного робота. К основанию корпуса крепится фланец 3, имеюн;ий каналы 4 и 5 для сообщения полостей наружного сильфона 6 и внутрен- него сильфона 7 с полостью, заключенной 10жд упругими манжетами 8 и 9, и по- .юстью под упругой манжетой 9. Упругие манжеты 8 и 9 закреплены на фланце 3. -1 режение создается последовательно на- сильфоном 6 и внутренним сильфо- ном 7. (ильфон 6 через герметизирующее КО/ПИК) 10 соединен с тягами II. В одной 1:; тяг 1 1 сформирован канал 12. Сильфон 7 соединен со штоком 13, в котором сформирован канал 14, служащий совместно с каналом 12 и сквозным пазом 15 в корпусе 1 магистралью для создания предварительного вакуума в источнике 16 рабочего разрежения при растяжении наружного сильфона 6. Уплотнение кольца 10 со штоком 13 при их взаимных нереме- щениях осуществляется манжетой 17, укрепленной па образующей отверстия кольца 10. Сильфоны 6 и 7 основаниями герметично кренятся к фланцу 3.
Источник 16 рабочего разрежения выполнен в виде сильфона 7, а источник 19 предварительного разрежения - в виде сильфона 6.
Для уплотнения тяг 11 и штока 13 используются уплотняющие кольца 20 и 21 (из резины, фторопласта). Для выхода воз- духа из корпуса 1 при растяжении сильфона 6 в корпусе имеется отверстие 22.
Вакуумный захват работает следующим образом.
При опускании руки 2 с установленным захватом манжеты 8 и 9 входят в сопри- косновение с поверхностью детали 18 и деформируются, после чего рука прекращает движение вниз. Сильфоны 6 и 7 в момент соприкосновения с деталью находятся в сжа- то.м состоянии, занимая в корпусе 1 наименьший объем. Учитывая, что манжетами
8 1 9 создана необхо.тимая герметичность с поверхностью детали, тяги 1 1 начинают движение Btsepx. Происходит увеличение размеров сильфона 6, что вызывает появление вакуума в источниках 16 и 19 разрежения. Сообщение их между собой осуществляется через каналы 12 и 14 и ггаз 15. Разобнление источников разрежения происходит после выхода отверстия канала 12 за верхнюю границу паза 15. Движение тяг вверх фекращается.
Шток 13 начинает движение вверх, растягивая СИЛЬФОН 7, что iioBbniiaeT вакуум в источнике рабочего разрежения. Движение тяг 11 и njTOKH 13 осуществляется от кинематических звеньев руки промышленного робота (пе показаны). Конструкция захвата рассчитывается так, чтобы в ходе получения предварительного и рабочего разрежения максимальные перемещения выходных отверстий каналов 12 и 14 не выходили за уплотняющие кольца 20 и 21. По достижении необходимого разжатия сильфона 7 движение штока 3 вверх прекращается, а в источнике рабочего разрежения устанавливается рабочий вакуум. Действуюп|ее на наружную поверхность детали 18 атмосферное дав.чепие прижимает деталь к захвату.
По окончании манипуляционпых действий П1ТОК 13 и тяги 11 опускаются, сильфоны 6 и 7 занимают исходное положение. Давление в источниках разрежения сравнивается с атмосферным и деталь 18 под собственным весом открывается от :;ахвата и остается па позиции разгрузки. Ру.ка робота приходит в ) загрузки и цикл повторяется.
Формула изобретения
Вакуумный захват для плоских деталей. содержащий корпус с установленными на нем и концентрично расположенны.ми упругими манжетами, полости которых соединены с источником разрежения, отличающийся те.м, что, с целью увеличения надежности и повыщения грузоподъемности, источник разрежения выполнен в виде концентрично расположенных сильфонов. при этом одним торцом сильфоны закреплены ка корпусе, а другим торцом соединены с приводом линейного пере.ме1иепия, причем полости сильфопов связаны с соответствующими полостями упругих .-анжст и имеют возможность соединения собой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1990 |
|
SU1771959A1 |
| Захватное устройство | 1986 |
|
SU1393627A1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1990 |
|
RU2091208C1 |
| АВТОНОМНОЕ ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОРОБОТА | 2004 |
|
RU2266810C1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОРОБОТА | 2005 |
|
RU2281197C1 |
| Вакуумный захват | 1985 |
|
SU1301700A1 |
| Вакуумный захват | 1982 |
|
SU1137051A1 |
| Вакуумный захват | 1988 |
|
SU1509319A2 |
| УСТРОЙСТВО ДЛЯ ВАКУУМНОЙ УКУПОРКИ БАНОК | 2018 |
|
RU2694506C1 |
Изобретение относится к области машиностроения и может быть использовано в конструкциях захватных органов роботов манипуляторов. Цель изобретения - увеличение .надежности и повышение грузоподъемности захвата за счет выполнения источника разрежения в вид,е двух источников - источника предварительного и источника рабочего разрежения. На корпусе 1 концентрично расположенными на нем упругими манжетами 8 и 9 установлены силь- фоны 6 и 7. Полости сильфонов связаны с соответствуюш.ими полостями манжет 8 и 9, а также общаются между собой через каналы 12 и 14 и паз 15. Сильфоны (т и 7 связаны с приводом линейного перемещения. Пр.едварительное разрежение в по,:1остях манжет 8 и 9 создается перемещением сильфопа 6, а затем рабочее разрежение в полости манжеты 9 -- перемещением сильфона 7. По окончании манипулянион- ных действий шток 13 и тяги 1 1 опускаются, СИЛЬФОНЫ 6 и 7 занимают исходное положение. Давление в источниках разрежения сравнивается с атмосферным и деталь 18 отрывается от захвата. I и. к (в (Л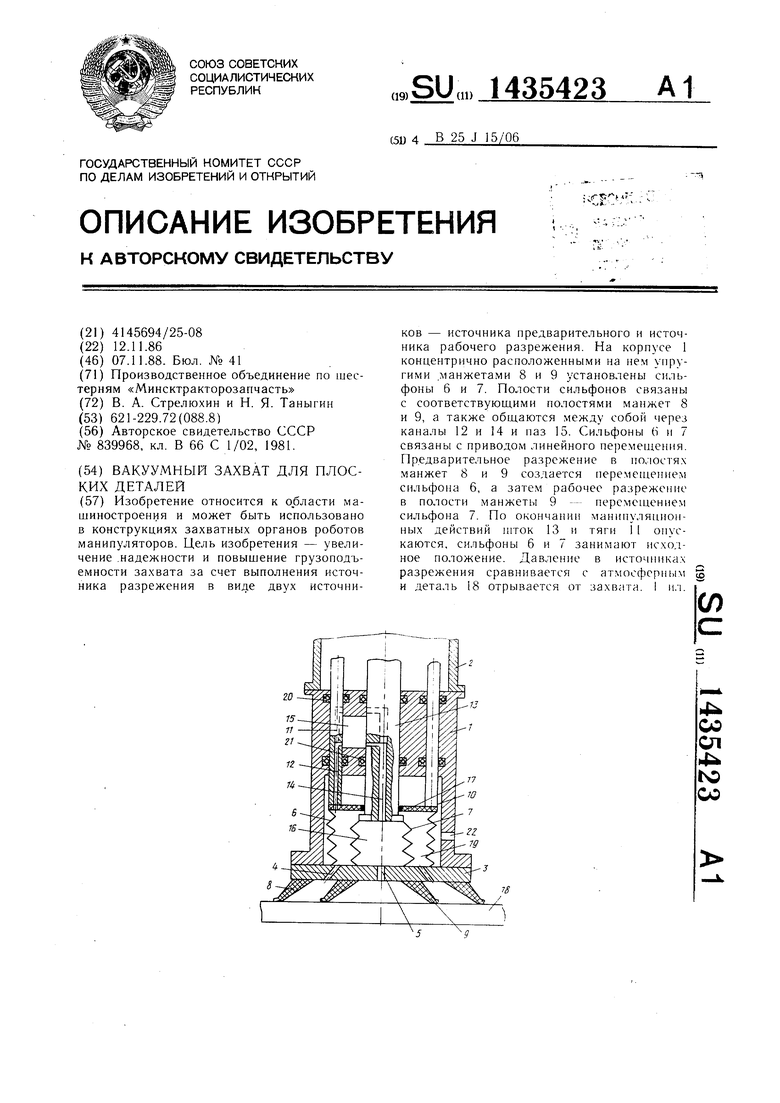
| Вакуумный захват | 1979 |
|
SU839968A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
