I Изобретение относится к машиностроению, в частности к обработке металлов шТ-амповкой, может быть использовано и в других областях техники, где необходим захват деталей сложной конфигурации, а также для захвата ряда деталей сходной конфигурации, таких как заготовки и изделия мно- гопозициоиной штамповки.
Цель изобретения - расширение технологических возможностей путем обеспечения захвата ряда различных деталей сходной конфигурации при многопозиционной штамповке.
На фиг.1 представлен вакуумный захват, разрез; на фиг.2 - захватываемые детали.
Вакуумный захват состоит из корпуса 1 с крышкой 2 и размешенного в корпусе 1 дополнительного поршня 3 с полостью 4, в которой размеш,ен основной поршень 5. На корпусе 1 и поршнях 3 и 5 расположены эластичные манжеты 6. Поршни уплотнены манжетами 7. В донной части поршня 5 выполнены отверстия 8 для отвода воздуха и закреплен плунжер 9, расположенный в отверстии ступенчатого цилиндра 10, установленного с возможностью перемещения внутри крышки 2 относительно неподвижно закрепленного на нем поршня 11, в штоке которого выполнен канал для подвода давления PI в полость 12. В образованную корпусом, поршнем и цилиндром полость 13 подводится давление Pz- Поршень 3 снабжен упорной шайбой 14 с отверстиями для отвода воздуха. Осевым упором корпуса 1 служит торец крышки 2.
Принцип действия захвата можно проследить при захвате детали 15 из матрицы штампа после выполнения второй стадии штамповки, т. е. когда деталь имеет диаметр и форму, соответствующие диаметру и форме поршня 3.
При вводе захвата в полость детали давление PI отключается и поршень 5 утапливается при опускании захвата внутрь полости 4. Кольцевое уплотнение за счет созданного разрежения раскрывается и тем са/Г
мым плотнее прижимается к поверхности детали, осуществляя надежную герметизацию полости внутри захвата, что повышает надежность захвата.
После перемещения детали на следующую позицию штамповки и установки роботом детали в матрицу отключается вакуум и включается давление РЬ в результате чего поршень 5 выдвигается и обеспечивает дожим детали до стенок отверстия
в матрице. Возможна установка детали без перемещения всего робота, а лишь за счет перемещения поршня 5.
При захвате детали после первой стадии штамповки отключаются давления Р и Р2, в результате чего порщни 5 и 3 утапливаются внутрь корпуса 1, а цилиндр 10 - внутрь крышки 2. Установка детали в матрицу для выполнения второй стадии штамповки осуществляется подачей давления Р2 в полость 13, в результате чего
цилиндр 10, выдвигаясь из корпуса 1, осуществляет ввод детали в матрицу. Извлечение из матрицы детали, прошедшей третью стадию щтамповки, осуществляется порщ- нем 5.
Формула изобретения
Вакуумный захват, содержащий полый корпус с расположенными внутри основным и дополнительным телескопическими поршнями, причем рабочие полости основного поршня соединены с источником давления, а на его штоке закреплена эластичная манжета, отличающийся тем, что, с целью расширения технологических возможностей, на корпусе захвата и на штоке дополнительного поршня размещены дополнительные эластичные манжеты, а основной шток посредством плунжера соединен с внутренним, расположенным внутри основного и дополнительного поршней, поршнем, бесщтоковая полость которого сообщена с источником давления, а штоковая - с источником вакуума.
ш
VLLZ.
Составитель А. Короткое
Редактор В. ПётрашТехред И. ВересКорректор Л. Патай
Заказ 932/19Тираж 954Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и.открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный схват манипулятора | 1988 |
|
SU1521587A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| ГИДРОЦИЛИНДР ДВОЙНОГО ДЕЙСТВИЯ | 1991 |
|
RU2022732C1 |
| Захватное устройство | 1984 |
|
SU1288046A1 |
| СПОСОБ ВЗВОДА, РАЗГОНА И НАНЕСЕНИЯ УДАРА СНАРЯДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ ПРИ РАЗРУШЕНИИ РАЗЛИЧНЫХ МАТЕРИАЛОВ | 2005 |
|
RU2291298C2 |
| Вакуумный захват | 1983 |
|
SU1117272A1 |
| Линия для штамповки деталей из листового материала | 1985 |
|
SU1282946A1 |
| УСТРОЙСТВО ДЛЯ ГИДРОФОРМОВКИ ТРУБНЫХ ЗАГОТОВОК | 2002 |
|
RU2222399C1 |
| Устройство для штамповки деталей эластичной средой | 1986 |
|
SU1323166A1 |
| Устройство для ударной листовой штамповки | 1988 |
|
SU1625576A1 |
Изобретение относится к зажимным устройствам т.ехнологического оборудования, в частности промышленных роботов, и обеспечивает расширение технологических возможностей вакуумного захвата. Захват содержит корпус 1, к которому прикреплена крышка 2, и установленные один в другой поршни 3 и 5 различных диаметров с уплотнениями 6 и 7. В центре донной части поршня 5 с отверстиями 8 для отвода воздуха закреплен плунжер 9, сопрягаюш,ийся с отверстием меньшего диаметра ступенчатого цилиндра 10, установленного с возможностью перемешения внутри корпуса 1 относительно неподвижно закрепленного на нем поршня 11. Подвод воздуха в полости 12 и 13 осуш,ествляется по каналам в штоке неподвижного поршня 11. 2 ил. (Л 00 о о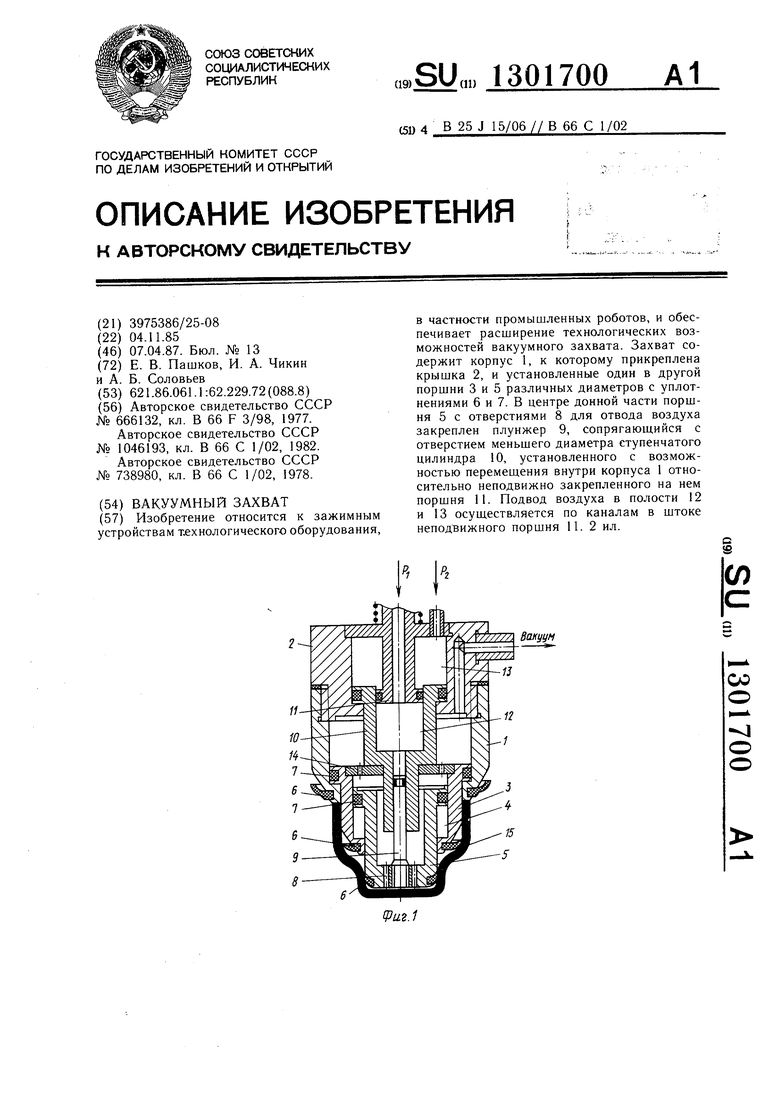
| Многоступенчатый гидродомкрат | 1977 |
|
SU666132A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Вакуумный захват | 1982 |
|
SU1046193A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Вакуумный захват | 1978 |
|
SU738980A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
