со
00
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство адресования автооператора | 1987 |
|
SU1510293A1 |
| КОМПЛЕКС ДЛЯ СПУСКА И ПОДЪЕМА ОБОРУДОВАНИЯ ДЛЯ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ СО ДНА МОРЕЙ | 2023 |
|
RU2814109C1 |
| Грузоподъемный борт транспортного средства | 1979 |
|
SU887292A1 |
| Строительный подъемник | 1982 |
|
SU1104088A1 |
| Грузоподъемное устройство | 1989 |
|
SU1706961A1 |
| Устройство для аварийной остановки грузонесущего органа подъемника | 1977 |
|
SU650934A1 |
| Подвесной конвейер | 1980 |
|
SU933564A1 |
| Устройство для разгрузки и перемещения элементов крепи | 1990 |
|
SU1830418A1 |
| Устройство для демонтажа футеровки алюминиевых электролизеров | 1981 |
|
SU1011736A1 |
| Транспортное средство с грузоподъемным устройством | 1985 |
|
SU1293931A1 |
Изобретение относится к устрой ствам для транспортирования изделий при их гальванической обработке. Цель повьшшние надеж 1ости работы. Автооператор включает колонны с вертикальными направляющимиj механизм передвижения 1 с электромагнитным тормозом, грузоподъемную каретку 8 с механизмом 4 ее подъема, имеющим гиб кий тяговый орган, запасованный чб рез блоки 6 с осью. На осях блоков 6 установлены дополнительные блоки, че рез которые запасован гибкий тяговый, орган ручной лебедки. С возможностью взаимодействия штоками с упорами 22 и 23 каретки 8 и со штоками 24 тормоза установлены соответственно соединенные между собой главные 18 и 19 и рабочие 20 и 21 гидроцилиндры (ГЦ). По одному из блоков 6 каждой ветви тяговых органов закреплено на оси, взаимодействующей с дополнительными направляющими 15, размещенньми внутри одной из колонн. При отказе в работе автооператора садка может находиться в ванне. За счет ослабления тягового органа опускается каретка :8. Блоки 6 с осью перемещаются вверх по дополнительным направляющим. Каретка 8 опускается до взаимодействия упора 22 со штоком ГЦ 18. Вытесненная жидкость перемеп(ает штоки ГЦ 18 и 9 5 ил. S сл
Изобретение относится к устройст вам для транспортирования изделий при их гальванической обработке и может быть использовано при нанесе НИИ покрытий на изделия в различных отраслях народного хозяйства
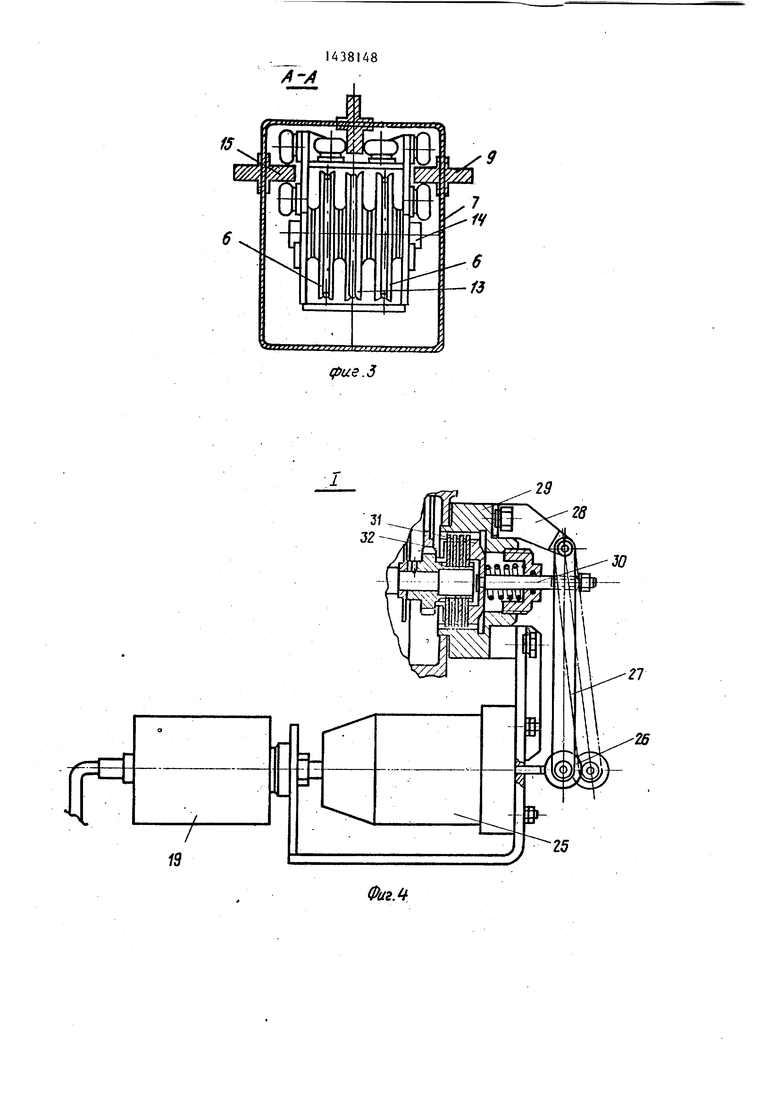
Цель изобретения повышение на дежности работы автооператора., На изображен автооператор, общий вид; на - то же, вид сбоку; на фиг.З сечение на на узел I на на схема запасовки гибких тяговых органов автооператора
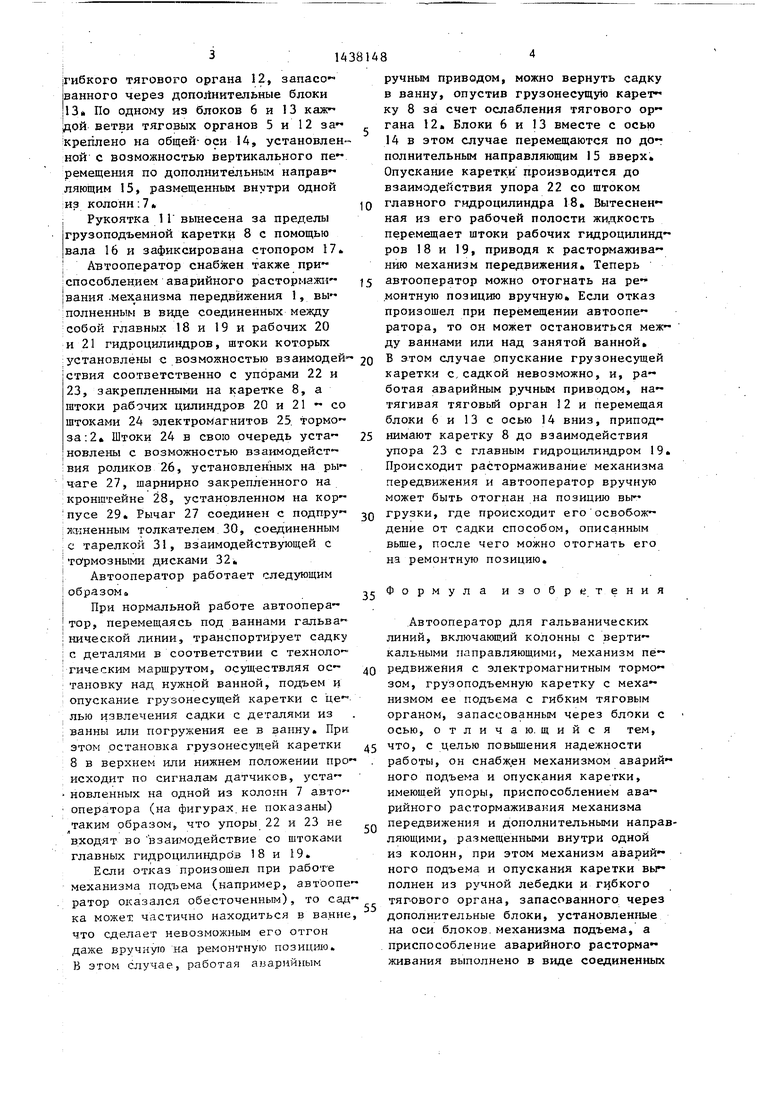
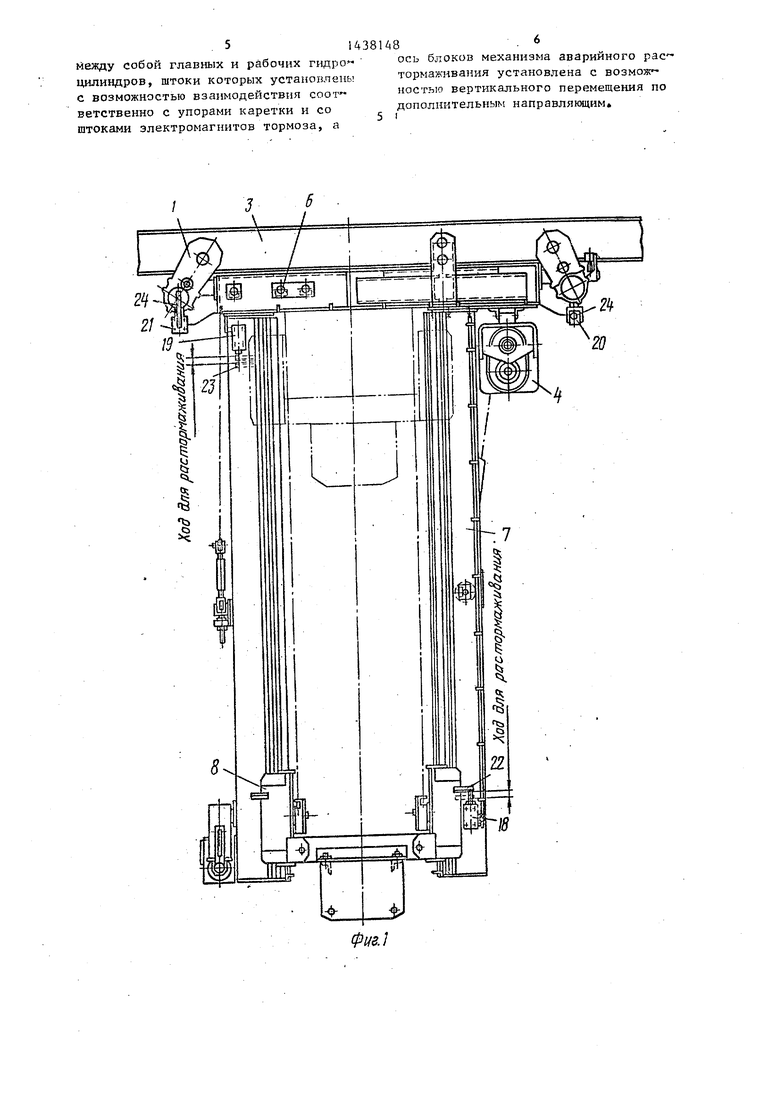
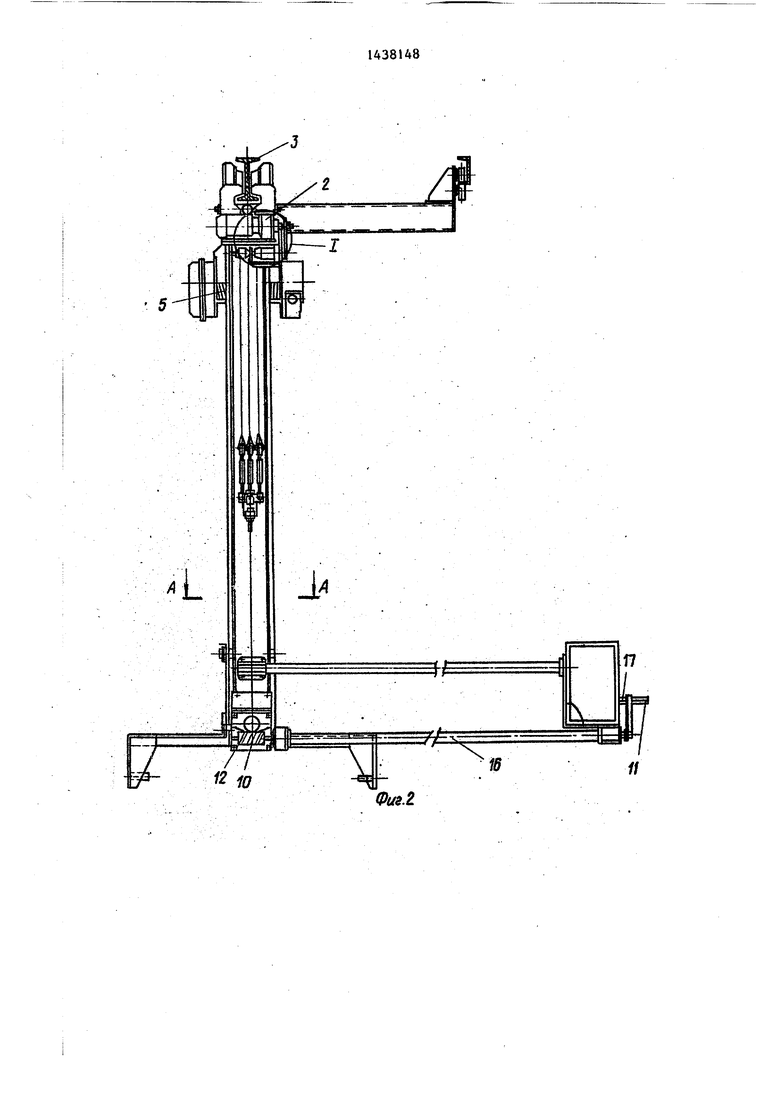
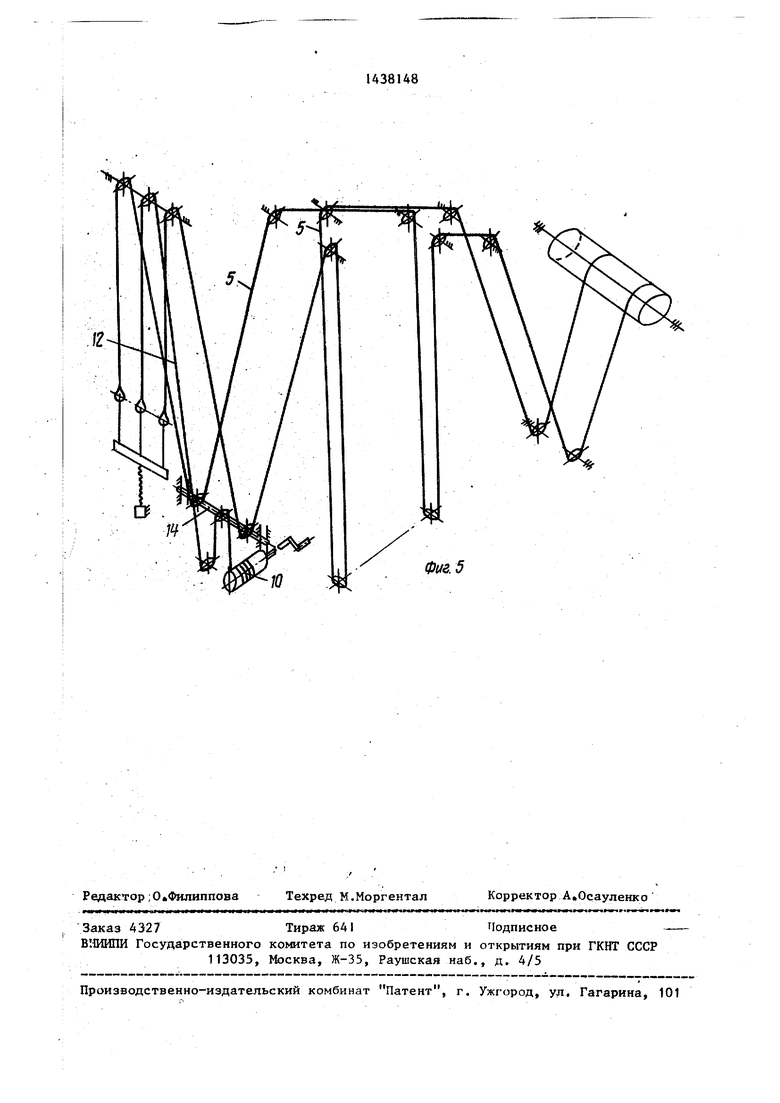
Автооператор со.стоит из механиз на передвижения 1 с электромагнитньм тормозом 2, установленным с возможностью перемещения по верхнему направляющему пути 3, механизма подъема 4 с гибким тяговым органом 5, выполненным из двух ветвей, запасованных через блоки 6, колонны 7, грузоподъемной каретки 8, установленной с возможностью перемещения по направляющим 9 колонн:7 Автооператор снабжен механизмом аварийного подъема и опускания каретки 8, состоящим из ручной лебедки 10 с рукояткой 11 и
4
00
1гибкого тягового органа 12, запасо ванного через дополнительные блоки 13 По одному из блоков 6 и 13 каж |дой ветви тяговых органов 5 и 12 за креплено на общей-оси 14, установленной с возможностью вертикального пе ремещения по дополнительным направ ляющим 15, размещенным внутри одной ;из колонн:
; Рукоятка 1 г вынесена за пределы грузоподъемной каретки 8 с помощью вала 16 и зафиксирована стопором 17 L Автооператор снабжен также при- 1способлением аварийного растормажи - вания .механизма передвижения 1, вы :полненным в виде соединенных между ; собой главных 18 и 19 и рабочих 20 и 21 гидроцилиндров, штоки которых :установлены с возможностью взаимодей |ствия соответственно с упорами 22 и 23, закрепленными на каретке 8, а штоки рабочих цилиндров 20 и 21 со штоками 24 электромагнитов 25. тормо за:2 Штоки 24 в свою очередь уста новлены с возможностью взаимодейст ;ВИЯ роликов 26, установленных на ры чаге 27, шарнирно закрепленного на кронштейне 28, установленном на кор пусе 29. Рычаг 27 соединен с подпру ; яшненным толкателем 30, соединенным С тарелкой 31, взаимодействующей с TofpMOSHbiMH дисками 32 ; Автооператор работает следующим i образом
I При нормальной работе автоопера- I тор, перемещаясь под ваннами гальва- :нической линии, транспортирует садку : с деталями в соответствии с техноло гическим маршрутом, осуществляя : тановку над нужной ванной, подъем и : опускание грузонесущей каретки с извлечЕШИя садки с деталями из ; ванны или погружения ее в ванну При зтом остановка грузонесущей каретки 8 в верхнем или нижнем положении про исходит по сигналам датчиков, уста новленных на одной из колонн 7 авто оператора (на фигурах, не показаны) таким образом, что упоры 22 и 23 не входят во взаимодействие со штоками главных гидроцилиндров 18 и 19
Если отказ произошел при работе механизма подъема (например, автоопе ратор оказался обесточенным), то сад ка может частично находиться в ванне что сделает невозможным его отгон даже вручную на ремонтную позицию. В этом случае, работая а}зарийяым
0
5
0
5
0
5
0
5
0
5
ручным приводом, можно вернуть садку в ванну, опустив грузонесущую карет ку 8 за счет ослабления тягового ор гана 12 Блоки 6 и 13 вместе с осью 14 в этом случае перемещаются по дО полнительным направляющим 15 вверх Опускание каретки производится до взаимодействия упора 22 со штоком главного гидроцилиндра 18 Вытеснен ная из его рабочей полости жи.цкость перемещает штоки рабочих гидроцилинд ров 18 и 19, приводя к растормажива нию механизм передвижения Теперь автооператор можно отогнать на ре .моитную позицию вручную. Если отказ произошел при перемещении автоопе ратора, то он может остановиться меж ду ваннами или над занятой ванной Б этом случае опускание грузонесущей каретки с, садкой невозможно, и, ра ботая аварийным ручным приводом, на тягивая тяговый орган 12 и перемещая блоки 6 и 13 с осью 14 вниз, припод нимают каретку 8 до взаимодействия упора 23 с главным гидроцилиндром 19 Происходит растормаживание механизма передвижения и автооператор вручную может быть отогнан на позицию выгрузки, где происходит его освобож дение от садки способом, описанным выше, после чего можно отогнать его на ремонтную позицию
Формула изобретения
Автооператор для гальванических линий, включаюш.ий колонны с верти кальными направляющими, механизм пе редвижения с электромагнитным тормо зом, грузоподъемную каретку с меха низмом ее подъема с гибким тяговым органом, запассованным через блоки с осью, отличаю, щийся тем, что, с целью повьш1ения надежности работы, он снабж.ен механизмом аварий ного подъема и опускания каретки, имеющей упоры, приспособлением ава рийного растормаживания механизма передвижения и дополнительными направляющими, размещенными внутри одной из колонн, при этом механизм аварий ного подъема и опускания каретки выполнен из ручной лебедки и гибкого тягового органа, запасованного через дополнительные блоки, установленные на оси блоков, механизма подъема, а приспособление аварийного расторма живания выполнено в виде соединенных
йежду собой главных и рабочих гидро цилиндров, штоки которых установлены с возможностью взаимодействия соот ветственно с упорами каретки и со штоками электромагнитов тормоза, а
ось блоков механизма аварийного рас тормаживания установлена с возмож ностыо вертикального перемещения по дополнительным направляющим.
//
фае.З
19
28
30
25
Редактор:0 Филиппова
Техред М.Моргентал
Заказ 4327Тираж 641Подписное -
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, уд, Гагарина, 101
Фиг. 5
Корректор А,Осауленко
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКИХ ЛИНИЙ | 0 |
|
SU316755A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Автооператор для гальванических линий | 1978 |
|
SU724410A2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
