11439235
Изобретение относится к автоматическому управлению горными машинами и может быть использовано при постки РО. Датчик 6 раздвижки подает информацию о каждом шаге раздвижки на вход реверсивного счетчика 7. Накоп
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического программного управления исполнительными органами угледобывающего комбайна по гипсометрии пласта | 1972 |
|
SU883418A1 |
| Способ программного управления угледобывающим комбайном и система для его осуществления | 1984 |
|
SU1250651A1 |
| Система программного управления угледобывающим комбайном | 1988 |
|
SU1610002A2 |
| Способ программного управления очистным комбайном в профиле пласта | 1990 |
|
SU1756557A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
| Способ автоматического управления режущими органами очистного комбайна | 1986 |
|
SU1472670A1 |
| Способ управления очистным комбайном и устройство для его осуществления | 1990 |
|
SU1809042A1 |
| Способ управления очистным комплексом | 1988 |
|
SU1523661A1 |
| Способ автоматического управления очистным комбайном по гипсометрии пласта и система для его осуществления | 1985 |
|
SU1270323A1 |
Изобретение относится к автоматическому управлению горными машинами. Цель - повышение точности за счет компенсации влияния параметрических возмущений. Задают начальное положение режущему органу в виде фиксированных шагов перемещения относительно его сдвинутого положения. Измеряют путь, пройденный комбайном. Перемещают орган по программе. При обработке последней периодически через отрезки пути 10-15 м останавливают комбайн и сдвигают орган до упора. Затем орган раздвигают на кол-во фиксированных шагов, соответствующих тому положению органа, которое зада- но программой. Т.о., появление утечки или перетечки в гидросистеме комбайна не может привести к накоплению погрешности-управления. 1 ил. (Л 4ib О9 СО IS9 00 ел
роении систем автоматизированного уп- ленная в виде алгебраической суммы
равления очистными комбайнами с режущими органами типа вертикальный барабан .
Цель изобретения - повышение точности за счет компенсации влияния ю параметрических возмуп;ений.
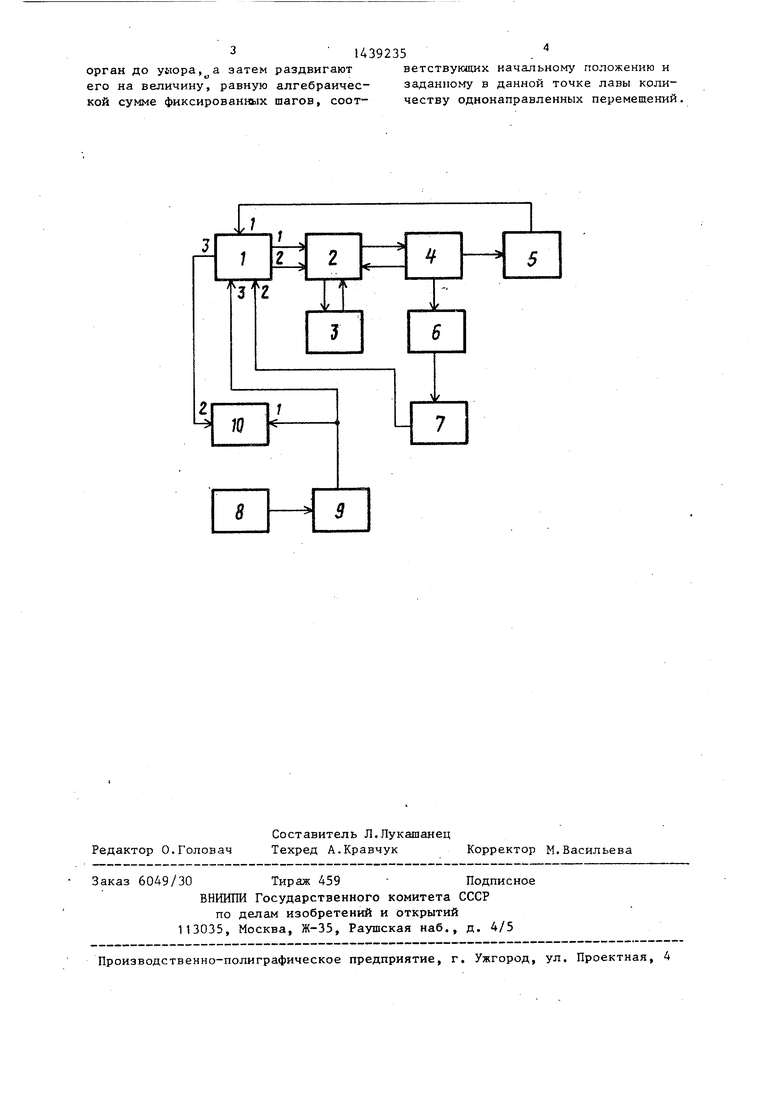
На чертеже приведена функциональная схема Устройства, реализующего предлагаемый способ.
Способ заключается в том, что при 15 обработке программы управления режущим органом периодически через отрезки пути 10-15 м останавливают комбайн и сдвигают режущий орган до упошагов перемещения штока гидродомкра та информация со счетчика 7 подаетс на второй вход блока 1 управления. Датчик 8 пути подает информацию о пройденном комбайном пути на вход блока 9. Через равные интервалы про денного пути на выходе блока 9 появ ляется сигнал, который попадает на первый вход блока 10 и на третий вход блока 1 управления. По этому сигналу происходит остановка комбай на и подается .команда на складывани гидродомкрата 4, которое происходит до тех пор, пока не сработает конце
ра. После этого режущий орган раздви-20 вой выключатель 5, сигнал с которого
гают на .количество фиксированных шагов, соответствующих тому положению режущего органа, которое задано программой. Таким образом, появление утечки или перетечки в .гидросистеме комбайна не может привести к накоплению погрешности управления.
Устройство состоит из блока 1 управления, которьй своими первым и вторым выходами соединен с входами коммутирующего устройства 2, гидравлические входы которого связаны с гидросистемой 3 и полостями раздвижки режущего органа (РО). Гидродомкрат 4 механически связан с концевым выключателем 5. Выход концевого выключателя соединен с первым входом блока 1 управления. Датчик 6 раздвижки РО соединен с гидродомкратом 4. Выход датчика 6 раздвижки связан с входами реверсивного счетчика 7, выход которого соединен с вторым входом блока 1 управления, Датчик 8 пути соединен с блоком 9 дискретиза- ции пути, выход которого соединен с третьим входом блока 1 управления и с первым входом блока. 10 управления скоростью подачи комбайна второй вход которой соединен с третьим входом блока 1 управления.
Устройство работает следующим образом.
Сигнал управления режущим органом из блока 1 управления поступает на входы коммутирующего устройства 2. В результате коммутации гидромагистралей гидросистемы 3 с соответствующими полостями гидродомкрата 4 происходит управление величиной раздвижшагов перемещения штока гидродомкрата информация со счетчика 7 подается на второй вход блока 1 управления. Датчик 8 пути подает информацию о пройденном комбайном пути на вход блока 9. Через равные интервалы пройденного пути на выходе блока 9 появляется сигнал, который попадает на первый вход блока 10 и на третий вход блока 1 управления. По этому сигналу происходит остановка комбайна и подается .команда на складывание гидродомкрата 4, которое происходит до тех пор, пока не сработает конце5
0
5
0
5
0
5
подается на первьш вход блока 1 управления. Далее происходит раздвижка гидродомкрата 4 до величины, равной алгебраической сумме шагов, соответствующих начальному положению и заданному в данной точке лавы количеству однонаправленных перемещений, что фиксируется посредством датчика раздвижки и реверсивного счетчика 7. По окончании этой операции на третьем входе блока 1 управления появляется сигнал, который, поступая на второй вход блока JO, инициирует возобновление движения комбайна.
Применение предлагаемого способа позволяет компенсировать влияние на управление неконтролируемых утечек и перетечёк, имеющих место в гидросистеме комбайна.
Форму л.а изобретения
Способ управления очистным комбайном с- режущим органом типа вертикальный барабан, заключающийся в задании начального положения режуш;его органа в виде фиксированных шагов перемещения относительно его сдвинутого положения, измерении пути, пройденного комбайном, и перемещении режущего органа по программе, заданной в виде однонаправленных перемещений относительно его начального положения в заданных точках лавы, отличающийся тем, что, с целью повьшения точности за счет компенсации влияния параметрических возмущений, через равные отрезки пути останавливают комбайн, сдвигают режущий
3 1439235,
орган до уаора, а затем раздвигают ветствующих начальному положению и
его на величину, равную алгебраической сумме фиксированных шагов, соотзаданному в данной точке лавы количеству однонаправленных перемещений.
| Способ программного управления угледобывающим комбайном и система для его осуществления | 1984 |
|
SU1250651A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Разработка методов оптимизации параметров очистных комбайнов и систем управления | |||
| - Экспериментально- исследовательские работы по программному управлению угольным комбайном в плоскости пласта | |||
| Промежуточный отчет, .Донецк, Авто- матгормаш, 1976, № ГР 730672-57, 157 с. | |||
