Известны захватные приспособления рамочного типа с автоматически поворачивающимися подхватами к однолеоедочным кранам для грузов (преимущественно пиломатериалов в пакетах на подкладках).
Описываемое приспособление отличается от известных тем, что его рама снабжена расположенными по углам неподвижными двухштихтовыми муфтами, в которых вертикально перемещаются с поворотом на 90° Г-образные штанги. Штанги имеют винтовые канавки, по которым перемещаются щтифты муфт под действием веса рамы. Захватное приспособление предлагаемой конструкции обеспечивает автоматизацию процессов захвата и отцепки груза. Кроме того, для обеспечения одновременного поворота Г-образных штанг, последние связаны гибкой связью с подпружиненной дополнительной рамой-траверсой.
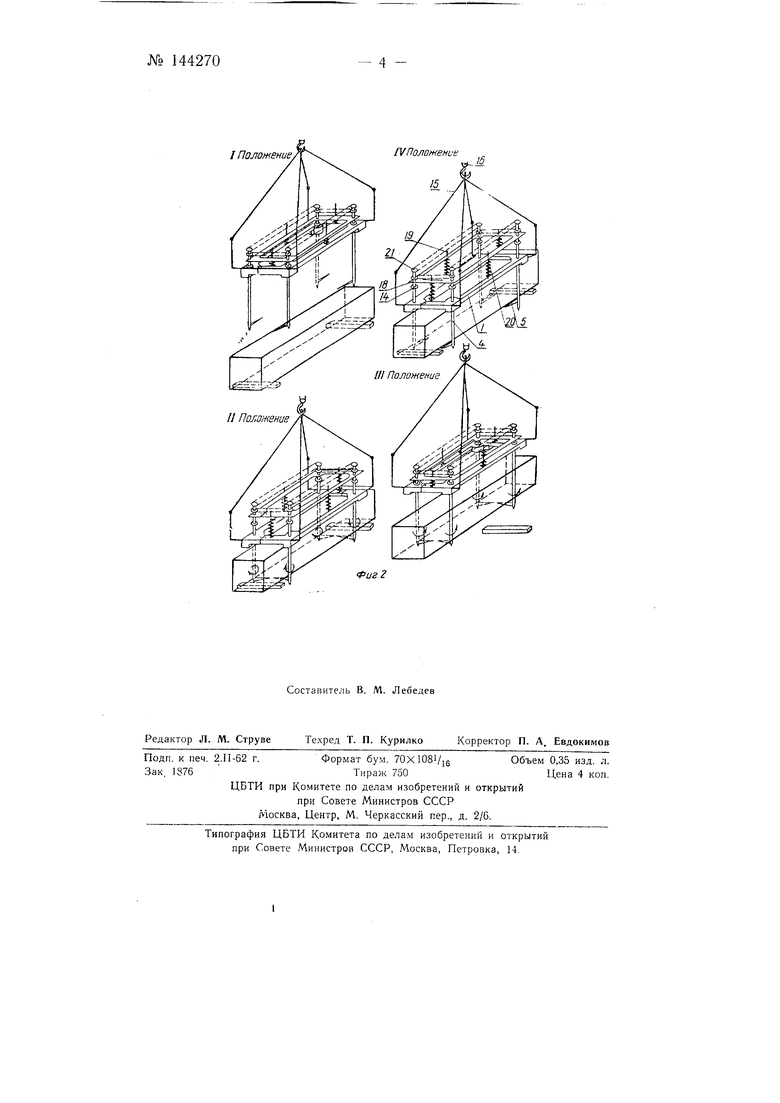
На фиг. 1 показана Г-образная штанга с неподвижной двухштифтовой муфтой с поперечным разрезом; на фиг. 2 - захватное приспособление в четырех промежуточных положениях при подъеме груза.
Захватное приспособление выполнено в виде рамы / коробчатой формы, в углах которой неподвижпо закреплены четыре двухштифтовые муфты 2 с штифтами 3, поворачивающимися вокруг горизонтальной оси. В муфтах вертикально перемещаются и поворачиваются вокруг вертикальной оси Г-образные штанги 4, нижние концы которых выполнены в виде конусных опорных пят и снабжены подцепными рычагами 5 для размещения груза. На цилиндрической поверхности каждой штанги выфрезерованы две одинаковые, симметрично расположенные относительно оси штанги, системы направляющих канавок 5, 7, 8 я 9 с подпружиненными направляющими упорами 10, 11, 12 и 13. По направляющим канавкам скользят щтифты 3 муфты 2. Выше канавок на штангах 4 расположены упорные бурты 14, передающие вес груза от штанг к раме 1 и через щарнирные тяги 15 к крюку крана 16. Верх№ 144270-- 2
ними концами штанги укреплены в радиально-упорных подшипниках/7, внешние обоймы которых крепятся в дополнительной раме-траверсе 18, жестко связываюшей штанги друг с другом. Рама-траверса снаожена отверстиями для прохода направляюших стержней 19, приваренных к раме /. На стержни насажены пружины 20, рассчитанные на полное сжатие от общего веса захватных штанг 4 и рамы-траверсы 18. На выступающих выше рамы-траверсы концах штанг 4 неподвижно закреплены по две звездочки 21 цепной передачи, которая взаимно связывает все захватные штанги, обеспечивая их синхронный поворот независимо от того, все ли они пятами касаются основания.
Направляющие винтовые канавки 6 обеспечивают поворот штанг на 90° вокруг вертикальной оси при захвате груза, продольные канавки 7 - вертикальное перемещение штифтов при подъеме груза, винтовые канавки 8 - поворот захватных штанг в первоначальное положе ние для отцепки груза и продольные канавки 9 - вертикальное перемещение штифтов при выводе захватного устройства.
В положении / захватное устройство находится под грузом. Рычаги 5 штанг 4 расположены вдоль груза. Штифты 3 муфт 2 находятся в верхней части канавок 6. В полол ении // захватное устройство опускается на пакет груза. Штанги 4 конусными опорными пятами упираются в основание. Рама / опускается под действием собственного веса, и штифты 3 муфт, скользя по винтовым канавкам (), разворачивают штанги на 90°, заводя подцепные рычаги под груз. В положении /// рама / поднимается, штифты 3 скользят по продольным канавкам 7. Рама / доходит до упорных буртов 14. В положении IV груз поднят.
В заключении Сибирского технологического института захватное устройство предлагаемой конструкции признано работоспособным, обеспечивающим автоматическое выполнение операций захвата и отцепки грузов прямоугольной формы на подкладках.
Предмет изобретени
1.Захватное приспособление к однолебедочным кранам для грузов, преимущественно пиломатериала в пакетах на подкладках, рамочного типа, снабженное автоматически поворотными подхватами, отличающееся тем, что, с целью обеспечения автоматизации процесса захвата и отцепки груза, его рама снабжена по углам неподвижными двухштифтовыми муфтами, в которых вертикально перемещаются с поворотом на 90° Г-образные щтанги, имеющие продольные, снижающиеся по винтовой вертикальные канавки, по которым перемещаются штифты муфт под действием веса рамы.
2.Захватное приспособление по п. 1, отличающееся т(м, что с целью одновременного поворота Г-образных штанг, последние связаны гибкой связью с подпружиненной дополнительной рамой-траверсой.
Фиг I
1Полон ение,
Л/Положение
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное приспособление | 1956 |
|
SU106880A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| Грузозахватное устройство | 1979 |
|
SU867842A1 |
| Захват-манипулятор подъемного крана для перемещения пакетированного груза | 1977 |
|
SU683979A1 |
| Захватное устройство для труб | 1979 |
|
SU885136A1 |
| ПРИСПОСОБЛЕНИЕ К КРАНУ ДЛЯ ТРАНСПОРТИРОВКИ И КАНТОВКИ РАЗНЫХ ПО РАЗМЕРАМ ПЛОСКИХ ГРУЗОВ | 1966 |
|
SU180321A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Грузозахватное устройство | 1986 |
|
SU1440841A1 |
| Грузозахватное устройство | 1979 |
|
SU850549A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |