22
25
ааал.
4
4;
о 00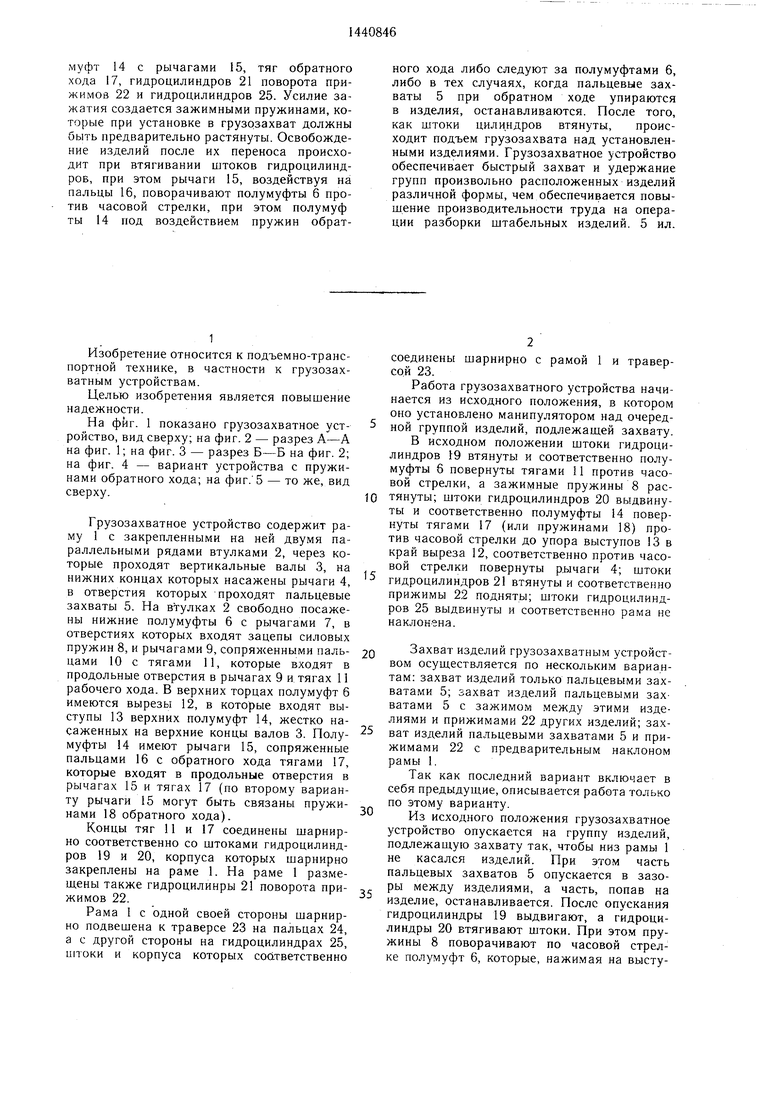
| название | год | авторы | номер документа |
|---|---|---|---|
| Линия для расфасовки жидкостей в бочки | 1974 |
|
SU520326A1 |
| Копнитель зерноуборочного комбайна | 1980 |
|
SU880315A1 |
| Устройство для установки хольнитенов на изделии | 1981 |
|
SU992424A1 |
| Захватное устройство для штучных грузов | 1980 |
|
SU927716A1 |
| Линейный гидроусилитель | 1991 |
|
SU1778374A1 |
| Транспортное средство для перевозки длинномерных грузов | 1982 |
|
SU1024320A1 |
| Устройство для кантования изделий | 1988 |
|
SU1675186A1 |
| Широкозахватное почвообрабатывающее орудие | 1982 |
|
SU1042636A1 |
| Лесопосадочная машина | 1987 |
|
SU1463163A1 |
| УСТРОЙСТВО для ШТАБЕЛИРОВАНИЯ, СОРТИРОВКИ, | 1968 |
|
SU220144A1 |
Изобретение относится к погрузо-раз- грузочным работам. Целью изобретения является повышение надежности. Грузозахватное устройство состоит из рамы 1, втулок 2, валов 3, рычагов 4, пальцевых захватов 5, полумуфт 6 с рычагами 7, силовых пружин 8, рычагов 9, тяг И, пальцев 10, верхних полу -х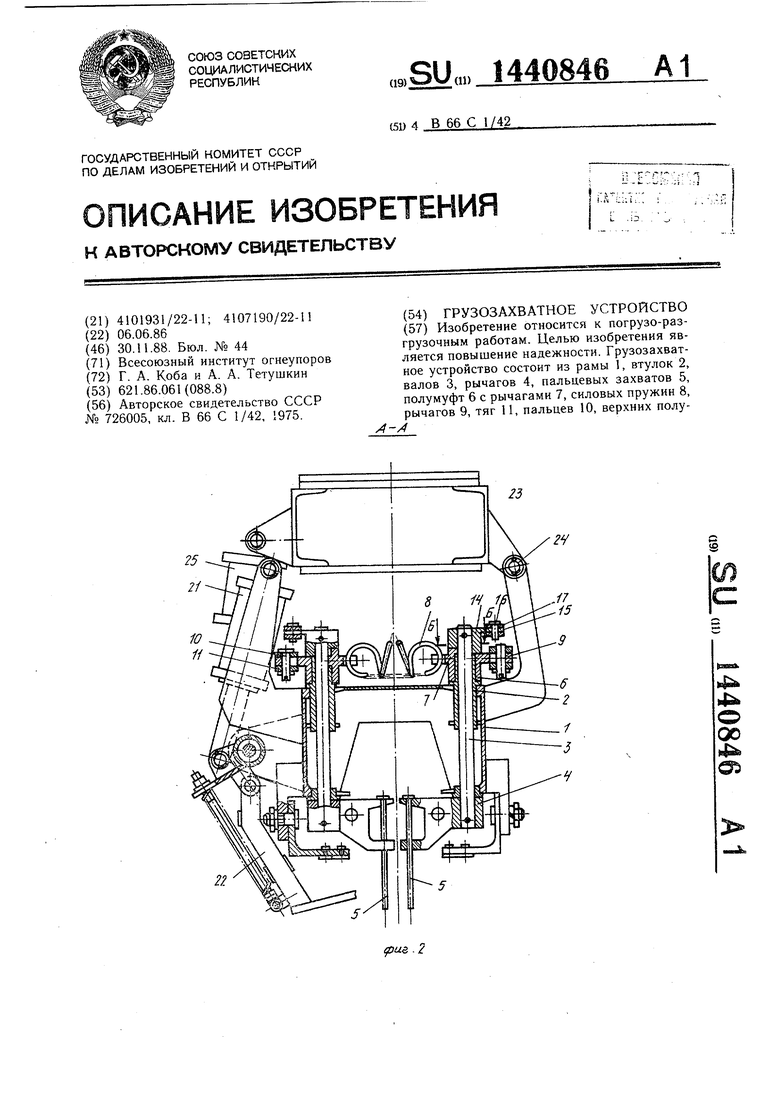
дйиъ .1
муфт 14 с рычагами 15, тяг обратного хода 17, гидроцилиндров 21 поворота прижимов 22 и гидроцилиндров 25. Усилие зажатия создается зажимными пружинами, которые при установке в грузозахват должны быть предварительно растянуты. Освобождение изделий после их переноса происходит при втягивании штоков гидроцилиндров, при этом рычаги 15, воздействуя на пальцы 16, поворачивают полумуфты 6 против часовой стрелки, при этом полумуф ты 14 под воздействием пружин обрат
1
Изобретение относится к подъемно-транспортной технике, в частности к грузозахватным устройствам.
Целью изобретения является повышение надежности.
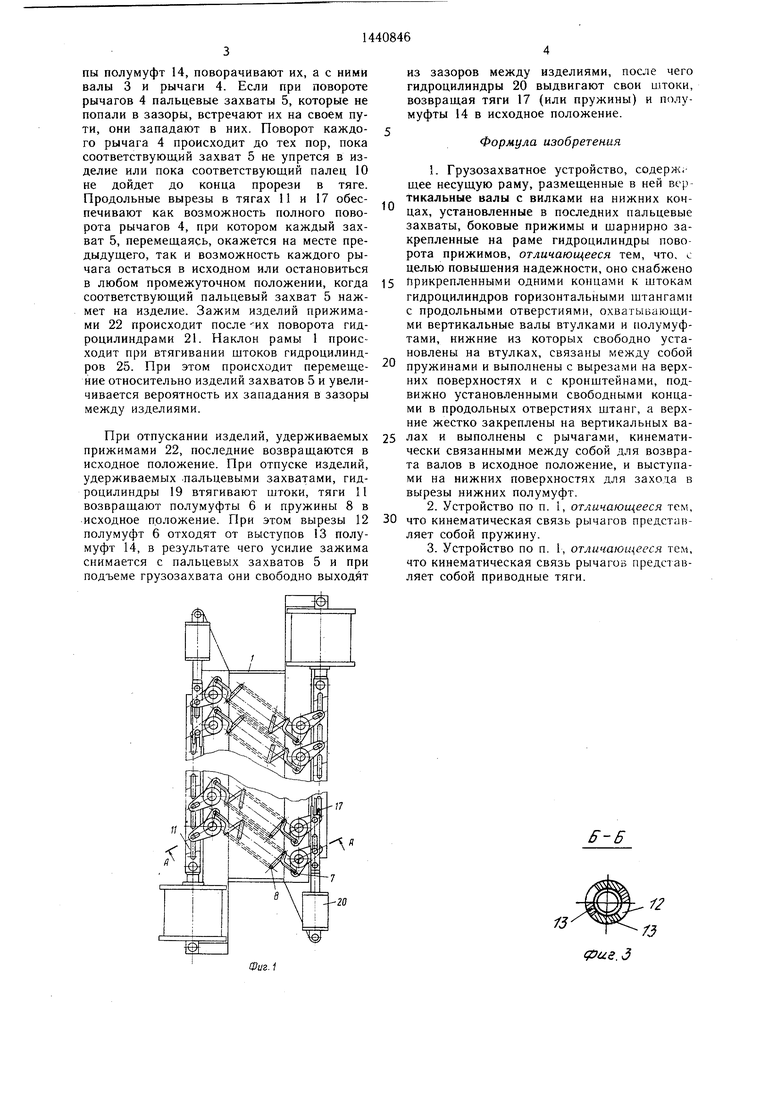
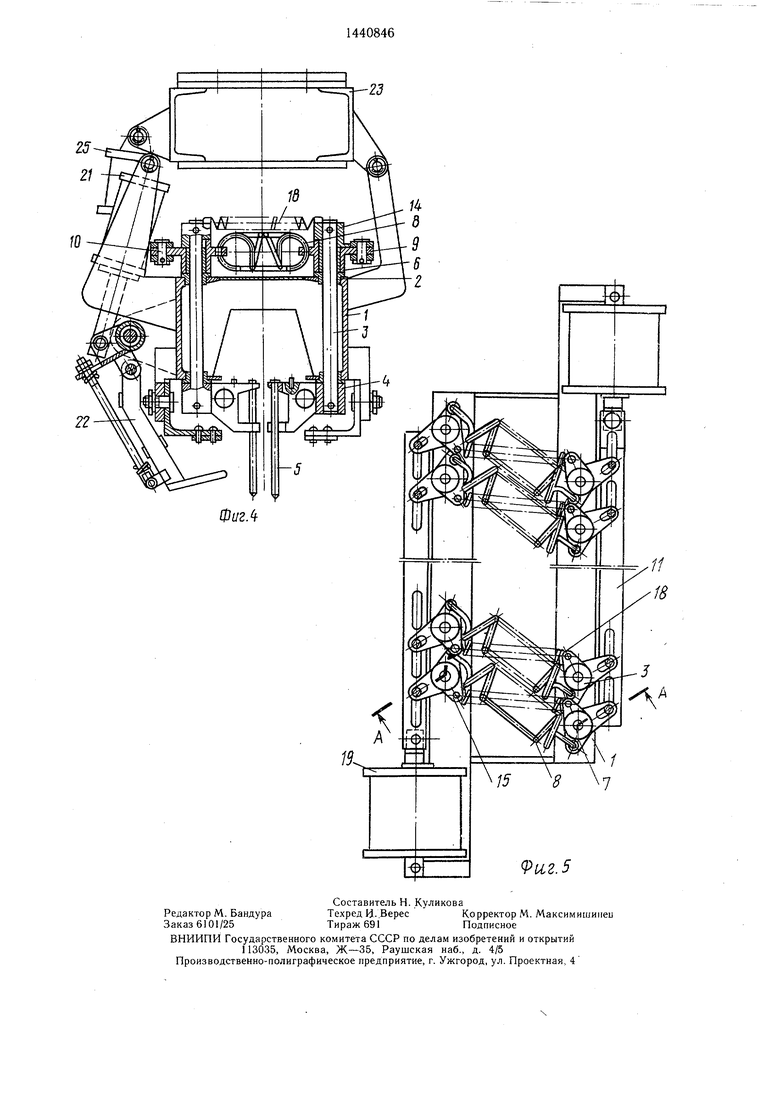
На фиг. 1 показано грузозахватное уст- ройство, вид сверху; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - вариант устройства с пружинами обратного хода; на фиг. 5 - то же, вид сверху.
Грузозахватное устройство содержит раму 1 с закрепленными на ней двумя параллельными рядами втулками 2, через которые проходят вертикальные валы 3, на нижних концах которых насажены рычаги 4, в отверстия которых проходят пальцевые захваты 5. На втулках 2 свободно посажены нижние полумуфты 6 с рычагами 7, в отверстиях которых входят зацепы силовых пружин 8, и рычагами 9, сопряженными паль- цами 10 с тягами И, которые входят в продольные отверстия в рычагах 9 и тягах 11 рабочего хода. В верхних торцах полумуфт 6 имеются вырезы 12, в которые входят выступы 13 верхних полумуфт 14, жестко насаженных на верхние концы валов 3. Полу- муфты 14 имеют рычаги 15, сопряженные пальцами 16 с обратного хода тягами 17, которые входят в продольные отверстия в рычагах 15 и тягах 17 (по второму варианту рычаги 15 могут быть связаны пружи- нами 18 обратного хода).
Концы тяг 11 и 17 соединены шарнир- но соответственно со штоками гидроцилиндров 19 и 20, корпуса которых шарнирно закреплены на раме 1. На раме 1 размещены также гидроцилинры 21 поворота при- жимов 22.
Рама 1 с одной своей стороны шарнирно подвешена к траверсе 23 на пальцах 24, а с другой стороны на гидроцилиндрах 25, штоки и корпуса которых соответственно
ного хода либо следуют за полумуфтами 6, либо в тех случаях, когда пальцевые захваты 5 при обратном ходе упираются в изделия, останавливаются. После того, как штоки цили.ндров втянуты, происходит подъем грузозахвата над установленными изделиями. Грузозахватное устройство обеспечивает быстрый захват и удержание групп произвольно расположенных изделий различной формы, чем обеспечивается повышение производительности труда на операции разборки штабельных изделий. 5 ил.
5
0
0 ,.
г
соединены шарнирно с рамой 1 и траверсой 23.
Работа грузозахватного устройства начинается из исходного положения, в котором оно установлено манипулятором над очередной группой изделий, подлежаш,ей захвату.
В исходном положении штоки гидроцилиндров 19 втянуты и соответственно полумуфты 6 повернуты тягами 11 против часовой стрелки, а зажимные пружины 8 растянуты; штоки гидроцилиндров 20 выдвинуты и соответственно полумуфты 14 повернуты тягами 17 (или пружинами 18) против часовой стрелки до упора выступов 13 в край выреза 12, соответственно против часовой стрелки повернуты рычаги 4; штоки гидроцилиндров 21 втянуты и соответственно прижимы 22 подняты; штоки гидроцилиндров 25 выдвинуты и соответственно рама не наклонена.
Захват изделий грузозахватным устройством осуществляется по нескольким вариантам: захват изделий только пальцевыми захватами 5; захват изделий пальцевыми захватами 5 с зажимом между этими изделиями и прижимами 22 других изделий; захват изделий пальцевыми захватами 5 и прижимами 22 с предварительным наклоном рамы 1.
Так как последний вариант включает в себя предыдущие, описывается работа только по этому варианту.
Из исходного положения грузозахватное устройство опускается на группу изделий, подлежащую захвату так, чтобы низ рамы 1 не касался изделий. При этом часть пальцевых захватов 5 опускается в зазоры между изделиями, а часть, попав на изделие, останавливается. После опускания гидроцилиндры 19 выдвигают, а гидроцилиндры 20 втягивают штоки. При этом пружины 8 поворачивают по часовой стрелке полумуфт 6, которые, нажимая на выступы полумуфт 14, поворачивают их, а с ними валы 3 и рычаги 4. Если при повороте рычагов 4 пальцевые захваты 5, которые не попали в зазоры, встречают их на своем пути, они западают в них. Поворот каждого рычага 4 происходит до тех пор, пока соответствующий захват 5 не упрется в изделие или пока соответствующий палец 10 не дойдет до конца прорези в тяге. Продольные вырезы в тягах 11 и 17 обеспечивают как возможность полного поворота рычагов 4, при котором каждый захват 5, перемещаясь, окажется на месте предыдущего, так и возможность каждого рычага остаться в исходном или остановиться в любом промежуточном положении, когда соответствующий пальцевый захват 5 нажмет на изделие. Зажим изделий прижимами 22 происходит после их поворота гидроцилиндрами 21. Наклон рамы 1 происходит при втягивании щтоков гидроцилиндров 25. При этом происходит перемещение относительно изделий захватов 5 и увеличивается вероятность их западания в зазоры между изделиями.
При отпускании изделий, удерживаемых прижимами 22, последние возвращаются в исходное положение. При отпуске изделий, удерживаемых пальцевыми захватами, гидроцилиндры 19 втягивают штоки, тяги И возвращают полумуфты 6 и пружины 8 в исходное положение. При этом вырезы 12 полумуфт 6 отходят от выступов 13 полумуфт 14, в результате чего усилие зажима снимается с пальцевых захватов 5 и при подъеме грузозахвата они свободно выходят
Фиг.1
из зазоров между изделиями, после чего гидроцилиндры 20 выдвигают свои штоки, возвращая тяги 17 (или пружины) и полумуфты 14 в исходное положение.
Формула изобретения
. Грузозахватное устройство, содерж.- щее несущую раму, размещенные в ней вертикальные валы с вилками на нижних концах, установленные в последних пальцевые захваты, боковые прижимы и шарнирно закрепленные на раме гидроцилиндры поворота прижимов, отличающееся тем, что, с целью повышения надежности, оно снабжено прикрепленными одними концами к штокам
гидроцилиндров горизонтальными штангами с продольными отверстиями, охватывающими вертикальные валы втулками и полумуфтами, нижние из которых свободно установлены на втулках, связаны между собой пружинами и выполнены с вырезами на верхних поверхностях и с кронштейнами, подвижно установленными свободными концами в продольных отверстиях щтанг, а верхние жестко закреплены на вертикальных ва- лах и выполнены с рычагами, кинематически связанными между собой для возврата валов в исходное положение, и выступами на нижних поверхностях для захода в вырезы нижних полумуфт.
-5
.д
9иг.5
| Захватное устройство | 1975 |
|
SU726005A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
