Изобретение относится к грузозахватным устройствам.
Известно захватное устройство, содержащее несущую раму, шарнирно установленные на ней захватные рычаги и привод рычагов, включаюсшй в себя двигатель, соединенный с рычагами посредством ви-нтовой передачи, планки с наклонными пазами и. размещенных в пазах пальцев, закрепленных на рычагах l.
Однако это устройство сложно по конструкции из-за наличия силового привода, к которому необходимо подавать энергию.
Наиболее близким к изобретению по технической сущности является захватное устройство для штучных грузов, содержащее несущую раму, шарнирно установленные на ней захватные рычаги и механизм управления захватными рычагами, включающий в себя установленный на раме вал с закреплённым на нем зубчатым колесом, соединенным с зубчатой рейкой, и механ.иэм поворота вала 2.
Однако это устройство характеризуется недостаточно высокой нгшежностью и безопасностью работы из-за возможности произвольной отстропки
груза в результате ослабления тросов подъемного механизма или случайных динамических воздействий.
Цель изобретения - повышение надежности и безопасности работы.
Поставленная цель достигается тем, что устройство снабжено фиксатором положения рычагов, состоящим из жесткой подпружиненной тяги с фиксирую10щей вилкой и жестко закрепленной на раме дополнительной тяги, соединенной с подпружиненной тягой опорной планкой, а вал выполнен коленчатым и снабжен обгонной муфтой и шарнир15но закрепленной на нем приводной вилкой, соединенной с эахв.атн1ыми рычагами посредством закрепленных на них пальцев и планки с выполненными в ней наклонными пазами, в которых
20 установлены пальцы, причем на валу выполнена лыска для взаимодействия с фиксирующей вилкой.
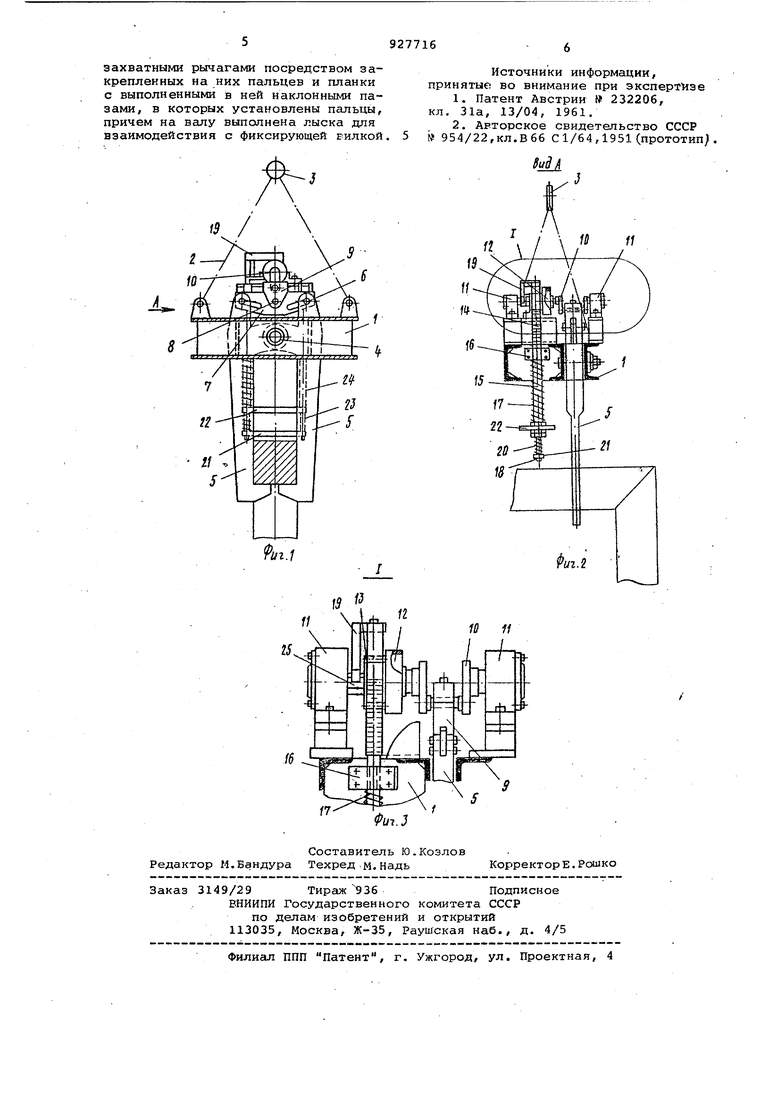
На фиг.1 изображено устройство, общий вид; на фиг.2 - вид А на фиг.1; на фиг.З - узел Г на фиг.2.
25
Захватное устройство содержит раму 1, соединенную посредством троса 2 с подвеской 3. В раме 1 установлена ось 4, на которой шарнирно зак30реплены захватные рычаги 5, подвижно связанные пальцами б с планкой 1, имеющей наклонные направляющие пазы. Планка 7 соединена осью 8 с приводной вилкой 9, которая закреплена шарнирно с шейкой коленчатого вала 10. Коленчатый вал 10 установлен в подшипниках 11, закрепленных на раме 1. На коленчатом валу 10 установлена обгонная роликовая муфта 12 с закрепленным на ней зубчатым колесом 13. Зубчатое колесо 13 соединено с рейкой 14, постоянно находящейся с ним в зацеплении и закрепленной на штоке 15, перемещающемся в направ ляющих 16, установленных на раме 1. На штоке 15 установлена возвратная пружина 17, В штоке 15 перемещаетел тяга 18 с укрепленной в верхней части ее фиксирующей вилкой 19 для фиксации коленчатого вала 10. Тяга 1 снабжена возвратной пружиной 20. Для предохранения от поворота тяги 18 и штока 15 они связаны через опорные планки 21 и 22 с короткой тягой 23 и коротким штоком 24, На валу 10 выполнена лыска 25 для взаимодействия с фиксирующей вилкой 19. Захватное устройство работает сле дующим образом. Устройство с разведенными захват ными рычагами 5 опускают на изделие опорные планки 21 и 22 в этот момент находятся выше изделия и, следовательно, не взаимодействуют с наружной его поверхностью. При этом шейк коленчатого вала 10 сшарнирно закрепленной на ней приводной-вилкой 9 на ходятся в положении, а захватные рычаги 5 занимают крайнее нижнее положение в направляющих пазах. При дальнейшем,опускании устройс ва опорная планка 21.упирается в на ружную поверхность изделия. Опорная планка 22 ложится на опорную планку 21, а коленчатый вал 10 выходит из зацепления с вилкой 19, закрепленно на тяге .18. Пружина 20 сжимается. Направляющие 16 перемещаются по што кам 15 и 24, сжимая возвратную пружину 17 до соединения рамы 1 с план кой 22. При этом зубчатое колесо 13 обкатывается по рейке 14,поворачива ясь по часовой стрелке на 180°, а обгонная муфта 12 поворачивает на, 180° коленчатый вал. Шейка коленчат го вала ГО с вилкой 9 опускается и пальцы б, скользя по направляющим пазам планки 7, занимают крайнее верхнее положение, поворачивая тем самым захватные рычаги 5 вокруг оси 4, закрывая их. При этом положе нии рычаги 5 находятся ниже внутрен ней опорной поверхности изделия на Ход, равный длине рабочей поверхнос ти вилки 19 и длине делительной окружности зубчатого колеса 13. Затем поднимают захватное устройство. При этом под действием возвратных ружин 17 и 20 тяга 18 опускается, занимая исходное положение, а рейка 14 взаимодействует с зубчатым колесом 13 и обгонной муфтой 12, поворачивая их на 180°, причем обгонная уфта, вращаясь против часовой стрелки, проскальзывает вокруг коленчатого вала, не поворачивая его. При этом вилка 19, опускаясь вместе с тягой 18,. блокирует коленчатый вал 10, оставляя их в закрытом положении. Тран спортируемое изделие переносится на рабочую позицию. После установки изделия на рабочей позиции грузозах- . ватное устройство опускается. Опорная планка 21 упирается в наружную поверхность изделия. При дальнейшем опускании устройства коленчатый вал 10 выходит из зацепления с вилкой 19. Направляющие 16, укрепленные на раме 1, перемещаются rio штокам 15 и 24, сжимая возвратную пружину 1 до упора рамы 1 с планкой 22. При этом зубчатое колесо 13, с закрепленной на нем обгонной муфтой 12 и установленной на коленчатом валу 10, обкатывается по рейке 14, поворачиваясь (по часовой стрелке) на-180°, а обгонная муфта 12 поворачивает коленчатый вал 10 на 180. Ыейка коленчатого вала 10 с закрепленной на ней шарнирной вилкой 9, связанной с планкой 7 осью 8, поднимается и пальцы б, скользя по направляющим пазам планки 7, занимают крайнее нижнее.положение, поворачивая захватные рычаги 5 вокруг оси 4, открывая их. Захватное устройство позволяет обеспечить-надежность и безопасность работы с различными штучными грузами. Формула изобретения Захватное устройство для штучных грузов, содержащее несущую раму, шарнирно установленные на ней захватные рычаги и механизм управления захватными рычагами, включающий в себя установленный на раме: вал с закрепленным на нем зубчатым колесом, соединенным с зубчатой рейкой, и механизм поворота вала, отличающееся тем, что, с целью повышения надежности и безопасности работы, оно снабжено фиксатором положения рычагов, включающим жесткую подпружиненную тягу с фиксирующей вилкой и жестко закрепленную на реме дополнительную тягу, соединенную с подпружиненной тягой опорной планкой, а вал выполнен коленчатым и снабжен обгонной муфтой и шарнирно закрепленной на .нем приводной вилкой, соединенной с
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1983 |
|
SU1211202A1 |
| Грузозахватное устройство | 1985 |
|
SU1353714A1 |
| УСТРОЙСТВО ДЛЯ ШАГОВОГО ПЕРЕМЕЩЕНИЯ ДЕТАЛЕЙ | 1992 |
|
RU2042490C1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1938 |
|
SU57816A1 |
| Привод транспортного средства, приводимого в действие мускульной силой человека | 1986 |
|
SU1505832A1 |
| Станок для гибки длинномерных изделий | 1980 |
|
SU940913A1 |
| Автомат для изготовления деталей из проволоки | 1991 |
|
SU1787630A1 |
| Устройство для перемещения вагонеток | 1987 |
|
SU1442446A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
