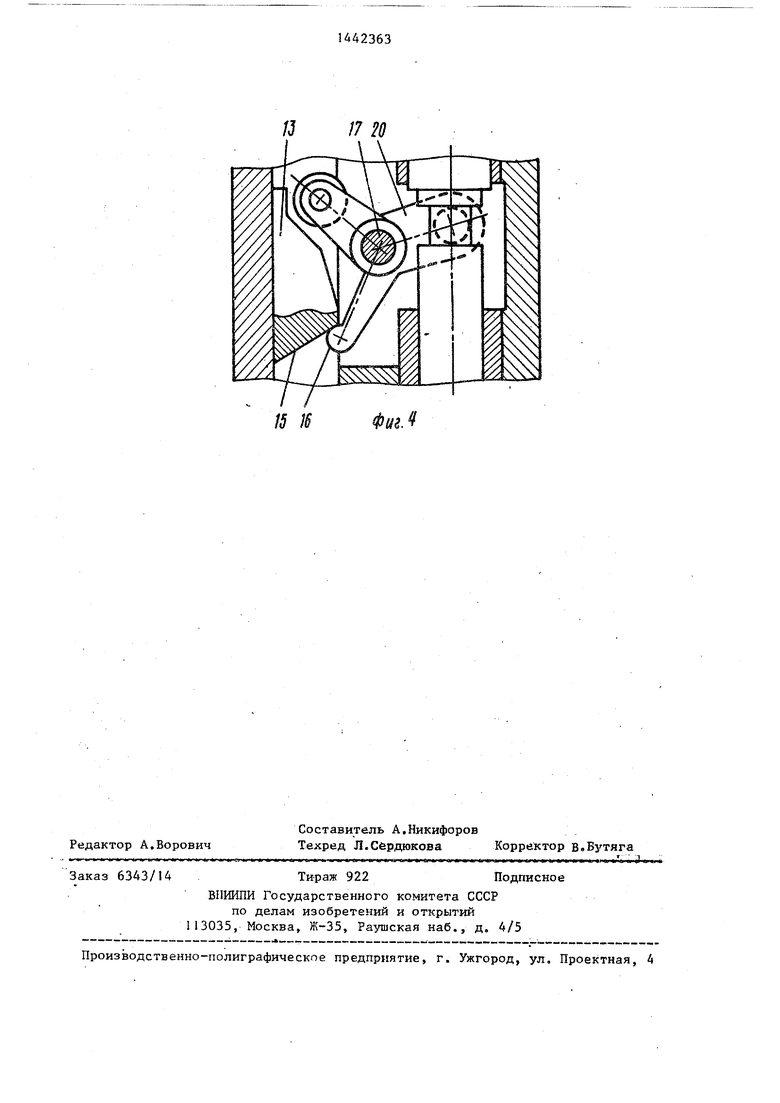
13 выполнен с двумя скосами 14 и 15 и установлен в корпусе 1 с возможностью перемещения в направлении, параллель- ном оси штанги 4, Передаточный , мент 17 выполнен трехлучевым с лучами 16519 и 20, при этом скос 15 взаимо-. действует с лучом 16, а скос 14 - с лучом 19, При подаче рабочей жидкости в .силовой цилиндр 1 1 клин 1S переме .вдается вверх. Скос 14 воздействует на луч 19 элемента 17 и поворачивает его по часовой стрелке. Ролики луча. 20 элемента 17 воздействуют на поверх ность 23 штанги 4, при этом штанга 4 совместно с прихватом 5 поворачива- ется и перемещается вниз и прихват 5 закрепляет деталь 24. 4 йл.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для зажима деталей | 1977 |
|
SU657952A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ ДЕТАЛЕЙ | 1971 |
|
SU312733A1 |
| Автоматическая линия | 1985 |
|
SU1355455A1 |
| Способ листовой штамповки и устройство для его осуществления | 1989 |
|
SU1712031A1 |
| Оправка для крепления деталей | 1986 |
|
SU1388196A1 |
| Многопозиционное поворотное приспо-СОблЕНиЕ | 1979 |
|
SU837736A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ РАЗМЕРОВ БАЛЛОНОВ ЭЛЕКТРОННОЛУЧЕВЫХ ТРУБОК | 1971 |
|
SU296173A1 |
| Приспособление -спутник | 1986 |
|
SU1407751A1 |
| Устройство для разъемного соединения трубопроводов | 2020 |
|
RU2769292C2 |
| Устройство для закалки деталей | 1980 |
|
SU885299A1 |
Изобретение относится к обработке материалов резанием, а именно к устройствам для закреплешш де талей на металло1)ежу1цих станках. Изобретение позволяет повысить надежность закрепления деталей. В корпусе 1 размещены штанга 4 и выполненный в виде силового цилиндра II и клина 13 силовой клиновой механизм. На штанге 4 для зажима детали 24 закреплен прихват 5. Клин S INS ОЗ ОЗ 9иг.1
1
Изобретение относится к обработке металлов резанием, а именно к устройствам для закрепления деталей на ме таллорежущик станках.
Целью изобретения является повы шение надежности закрепления деталей.
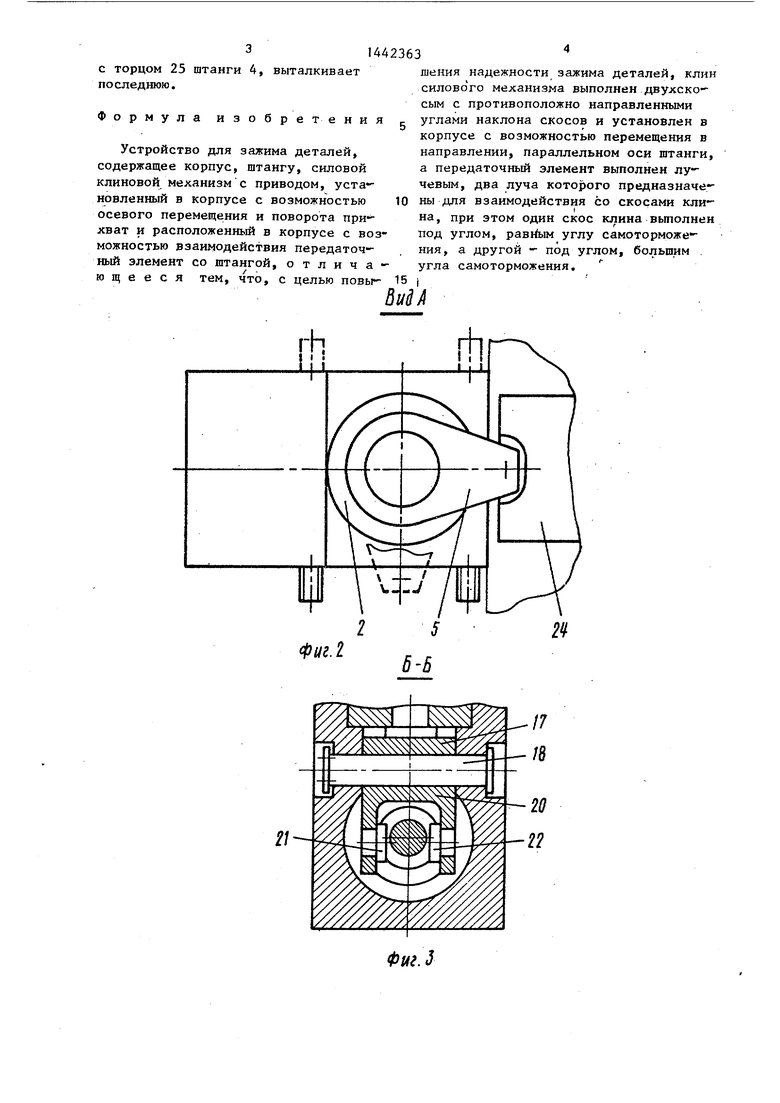
На фиГо изображено устройство, продольный разрез; на фиг.2 - вид А на фиг,1; на фиг.З - разрез на фиг. на фиг,4 - положение трехпле чего рычага при отжатой детали.
Устройство содержит корпус 1, внутри которого установлены втулки 2 и 3, служащие направляющими штанги 4 о Штанга 4 снабжена прихватом 5. Во втулке 3 расположен штырь 6, взаимодействующий с пазом 7j выполненным в штанге 4. Штанга 4 поджата пружиной 8 Положение штанги 4 контролируется конечными выключателями 9 и 10. Парал- лельно оси штанги 4 расположен вой клиновой механизм, состоящий из силового цилиндра 11, соединенного посредством винта 12 с клином 13. Клин 13 выполнен двухскосым, при этом углы скосов 14 и 15 противоположны друг другу. Угол скоса 14 клина 13 равен углу самоторможения, а угол скоса 15 больше угла самоторможения и выполнен из УСЛОВИЯ контакта с лучом
16передаточного элемента 17. Элемент
17выполнен трехлучевым и установлен на оси 18 между штангой 4 и силовым клиновым механизмом. Два других луча
19 и 20 элемента 17 контактируют еоответственно луч 19 со скосом 14 клина 13 и луч 20 со штангой посредством роликов 2 и 22, установленных на луче 20 элемента 17. Штанга 4 име ет поверхность 23. Прихват 5 предназ Начен для закрепления детали, 24. Ро
5
5
лики 21 и 22 взаимодействуют с торцом 25 штанги 4.
Устройство {Работает следующим образом.
При подаче рабочей среды под давле- нием клин 13, соединенный винтом 12 с силовым цилиндром 11, поднимается вверх. Поверхность скоса 14 клина 13 воздействует на луч 19 элемента 17 и поворачивает его по часовой стрелке, |Ролики 21 и 22J расположенные во ром луче 20 элемента 17, воздействуют. :на поверхность 23 штанги 4.
Штанга 4 с закрепленным на ней прихватом 5 по направляющим втулкам 2 и 3 перемещается вниз, сжимая пружину 8j причем жестко закрепленный во втулке 3 штырь 6, контактируя с пазом 7s, поворачивает ее на угол, достаточ - ный для съема детали 24.
Перед зажимом обрабатываемой дета ли 24 прихват 5 перемещается строго по вертикали. Крайние положения штан ги 4 контролируются конечными выключателями 9 и 10« Отжим обрабатьшаемой детали 24 и возврат прихвата 5 в иС ходное положение происходит в обрат ном порядке после перемены давления в полостях цилиндра 11. Клин 14 пере мещается вниз, освобождая 19 эле« мента 17. Под воздействием пружины 8 штанга 4 с прихватом 5, поворачиваясь поднимается вверх, освобождая обраба тываемую деталь 24.
В случае возршкновения препятстг ВИЙ на пути подъема штанги 4 по уси ЛИЮ больше усилия пружины 8, клин 13, перемещаясь вниз, скосом 15 нажимает на третий луч 16 элемента 17, при этом ролики 2 и 22, взаимодействуя
Фиг. 2
21
Фш. J
15 /
| Устройство для зажима деталей | 1980 |
|
SU867597A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
