(54) УСТРОЙСТВО ДЛЯ ЗЙЖИМА ДЕТАЛЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для зажима детали | 1980 |
|
SU918004A2 |
| Способ иглофрезерной обработки и иглофрезерный станок | 1986 |
|
SU1389943A1 |
| Агрегатный станок | 1977 |
|
SU686848A1 |
| Устройство для отделочной обработки наружных поверхностей тел вращения | 1988 |
|
SU1627384A1 |
| Зубодолбежный станок | 1986 |
|
SU1518092A1 |
| ЗАКРУТОЧНАЯ ГОЛОВКА К АВТОМАТАМ ДЛЯ ЗАВЕРТЫВАНИЯ ИЗДЕЛИЙ | 1968 |
|
SU231371A1 |
| Поворотно-зажимное устройство | 1983 |
|
SU1127745A1 |
| Устройство для отделочной обработки наружных поверхностей тел вращения | 1986 |
|
SU1388266A1 |
| Автомат для изготовления пружинных колец из винтовых пружинных заготовок | 1985 |
|
SU1278085A1 |
| Устройство для изменения положения изделия при обработке | 1983 |
|
SU1127746A1 |

1
Изобретение относится к станкостроению, а именно к зажимных устройствам для металлорежущих станков.
Известно устройство для зажима деталей, выполненное в виде прихвата, установленного на плунжере с возможностью перемещения от привода посредством клина 1,
В этом устройстве не регулируется угловое положение прихвата. .
Целью изобретения является расширение технологических возможностей устройства путем регулирования углового положения прихвата.
Для этого предлагаемое устройство снабжено подпружиненной рейкой и шестерней, выполненной на прихвате и связанной с рейкой, а также рычагом с регулируемым соотношением плеч, шарнирно установленным на клине с возможностью взаимодействия с рейкой
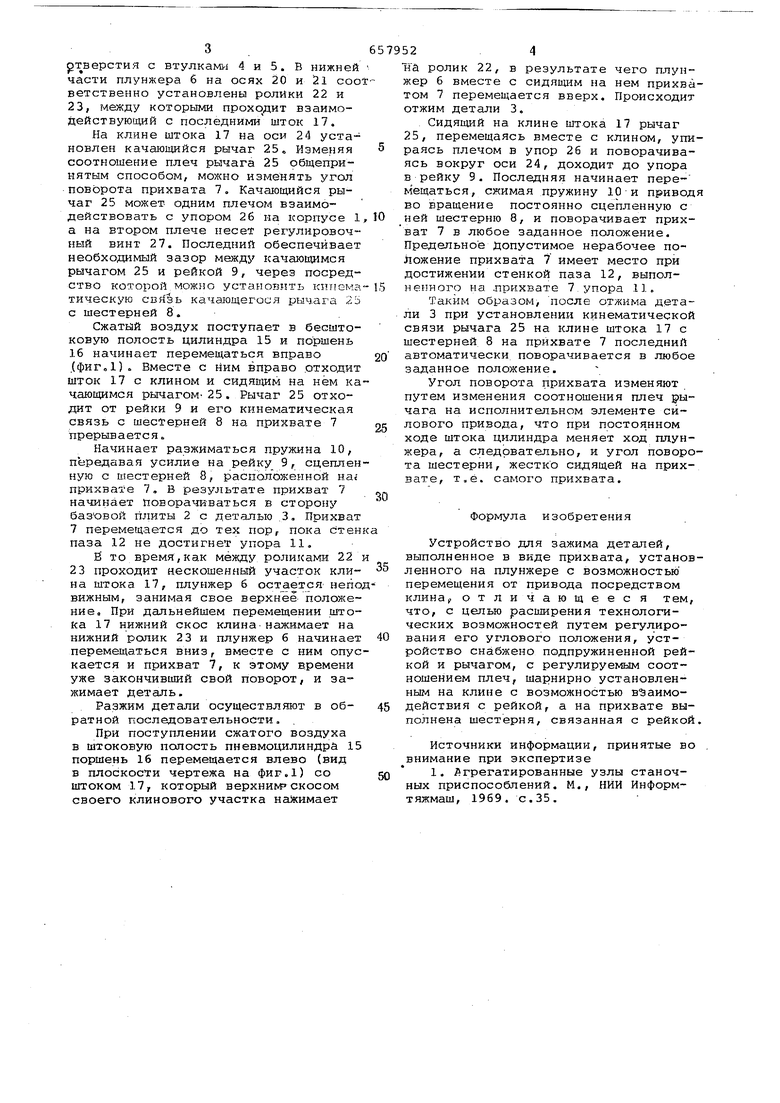
На фиг.1 изображено описываемое устройство, 15азрез; на фиг.2 - разрез й-й на фиг.1; на фиг.З - вид по стрелке Б на фиг Л; на фиг.4 - разреВ-В на фиг Л
В корпусе 1, на его базовой плите 2, устанавливают закрепляемую деталь 3. В отверстии корпуса 1 закреплены втулки 4 и 5, на которых установлен соответственно своими нижней и верхней частями плунжер б, имеющи возможность осевого перемещения. На .верхней части плунжера б с возможностью поворота на нем во втулке 5 расположен Г-образный прихват 7 для закрепления детали 3, На пов оротном прихвате 7 смонтирована шестерня 8 с рейкой 9, -снабженной пружиной 10, с помощ.ью которых прихват 7 поворачивают на плунжере 6. Предепы угла юворота прихвата 7 определяют упором 11f закрештенньм на втулке 5 и имеющим возможность взаимодействовать в допускаемых предельных положениях прихвата 7 со стенками паза 12 на прихвате 7. В пределах этого паза прихват 7 может занимать любое заданное положение. Сверху на прихвате 7 расположено кольцо 13 с гайкой 14, Осевое перемещение плужера 6 и поворот прихвата 7 осуществляются от силового привода пневмоцилиндром 15i
В пневмоцилиндрз 15 установлен поршень 15 со штоком 17, выполненны в виде двускосого клина. Шток 17 направляется втулками 18 и 19, установленными в отверстии корпуса 1, ось которого перпендикулярна оси
ртверстия с втулками 4 и 5. В нижней части плунжера б на осях 20 и 21 соответственно установлены ролики 22 и 23, между которьми проходит взаимодействующий с последними шток 17.
На клине штока 17 на оси 24 установлен качающийся рычаг 25, Изменяя соотношение плеч рычага 25 общепринятым способом, можно изменять угол поворота прихвата 7. Качающийся рычаг 25 может одним плечом взаимодействовать с упором 26 на корпусе 1 а на втором плече несет регулировочный винт 27. Последний обеспечивает необходимый зазор между качающимся рычагом 25 и рейкой 9, через посредство которой можно установить кинема тическую свяйь качающегося рычага 25 с шестерней 8.
Сжатый воздух поступает в бесштоковую полость цилиндра 15 и поршень 16 начинает перемещаться вправо .(фиг,1). Вместе с ним вправо .отходит шток 17 с клином и сидяпщм на нём качающимся рычагом-25. Рычаг 25 отходит от рейки 9 и его кинематическая связь с шестерней 8 на прихвате 7 прерывается.
Начинает разжиматься пружина 10, передавая усилие на рейку 9, сцепленную с шестерней 8, расположенной на« прихвате 7, В результате прихват 7 начинает Поворачи-ваться в сторону 6a3OBofi плиты 2 с деталью ,3, Прихват 7 перемещается до тек пор, пока стен паза 12 не достигнет упора 11,
б то время,как между роликами 22 23 проходит нескошенный участок клина штока 17, плунжер 6 ост ается неповижным, занимая свое верхнее положение. При дальнейшем перемещении штоka 17 нижний скос клина нажимает на нижний ролик 23 и плунжер б начинает перемещаться вниз, вместе с ним опускается и прихват 7, к этому времени уже закончивший свой поворот, и зажимает деталь.
Разжим детали осуществляют в обратной последовательности. ,
При поступлении сжатого воздуха в штоковую полость пневмоцилиндра 15 поршень 16 перемещается влево (вид в плоскости чертежа на фиг.1) со штоком 17, который верхнир скосом своего клинового участка нажимает
на ролик 22, в результате чего плунжер б вместе с сидящим на нем прихве том 7 перемещается вверх. Происходит отжим детали 3.
Сидящий на клине штока 17 рычаг 25, перемещаясь вместе с клином, упираясь плечом в упор 26 и поворачиваясь вокруг оси 24, доходит до упора в рейку 9. Последняя начинает пере 5eщaтьcя, сжимая пружину 10 и привод во вращение постоянно сцепленную с ней шестерню 8, и поворачивает прихват 7 в любое заданное положение. Предельное Допустимое нерабочее поЛожение прихвата 7 имеет место при достижении стенкой паза 12, выполненного на .прихвате 7, упора 11.
Таким образом, после отжима детали 3 при установлении кинематической связи рычага 25 на клине штока 17 с шестерней 8 на прихвате 7 последний автоматически поворачивается в любое заданное положение.
Угол поворота прихвата изменяют путем изменения соотношения плеч рычага на исполнительном элементе силового привода, что при постоянном ходе штока цилиндра меняет ход плунжера, а следовательно, и угол поворота шестерни, жестко сидящей на прихвате, т.е. самого прихвата.
Формула изобретения
Устройство для зажима деталей, выполненное в виде прихвата, установленного на плунжере с возможностью перемещения от привода посредством клина(, отличающеес я тем, что, с целью расширения технологических возможностей путем регулирования его углового положения, устройство снабжено подпружиненной рейкой и рычагом, с регулируемым соотношением плеч, шарнирно установленным на клине с возможностью вЭаимодействия с рейкой, а на прихвате выполнена шестерня, связанная с рейкой
Источники информации, принятые во внимание при экспертизе
