J
ю
СлЭ СО
N
. /
Изобретение относится к манипуляторам, может быт-ь использовано прн создании захватных устройств и является усовершенствованием схвата манипулятора по авт. св. № 626947.
Цель изобретения - повышение точности позиционирования изделия путем фиксации стержней между собой и поршней относительно ксУрпуса схвата.
На фиг. 1 показан схват, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1.
Схват манипулятора содержит стержни 1, расположенные с возможностью поступательного перемещения в упругих поршнях 2 силовых цилиндров, корпусами которых является корпус 3 схвата. Между рабочей средой и стержнями 1 и зажимаемым изделием 4 на упругих поршнях 2 смонтированы упругие пластины 5 и 6, например, из резинометаллической композиции. Средства подвода рабочей среды от источника давления обеспечивают подачу давления в цилиндры. Стержни 1 в сечении представляют шестиугольники, контактируют по боковым граням.
Схват работает следующим образом.
При з ажиме изделия под давлением рабочей среды в направлении изделия 4 перемещаются упругие поршни 2 со смонтированными в них стержнями I. Перемещение упругих поршней 2 в корпусе 3 и стержней 1
в упругих поршнях 2 происходит до тех пор, пока не произойдет контакт изделия 4 с поверхностью пластины 6. После этого стержни 1 под воздействием с одной стороны силы давления рабочей среды, а с другой - силы реакции изделия 4 начинают деформироваться, увеличивая свои поперечные размеры, чем обеспечивается их взаимная фиксация. Деформация .стержней также передается на упругие поршии 2, которые, деформируясь, в свою очередь, фиксируются относительно корпуса 3.
При освобождении изделия 4 в рабочих плоскостях гидроцилиндров давлением рабочей жидкости снижается до атмосферного, либо обеспечивается вакуум, после чего под действием сил упругости поршни и стержни приобретают свою первоначальную форму, а под действием сил упругости пластины 5 и 6, а также атмосферного давления, происходит перемещение стержней I и упругих поршней 2 в направлении от изделия 4.
Формула изобретения
Схват манипулятора по авт. св. № 626947, отличающийся тем, что, с целью повышения точности позиционирования изделий путем фиксации стержней между собой и поршней относительно корпуса схвата, стержни и поршни выполнены из, упругого материала.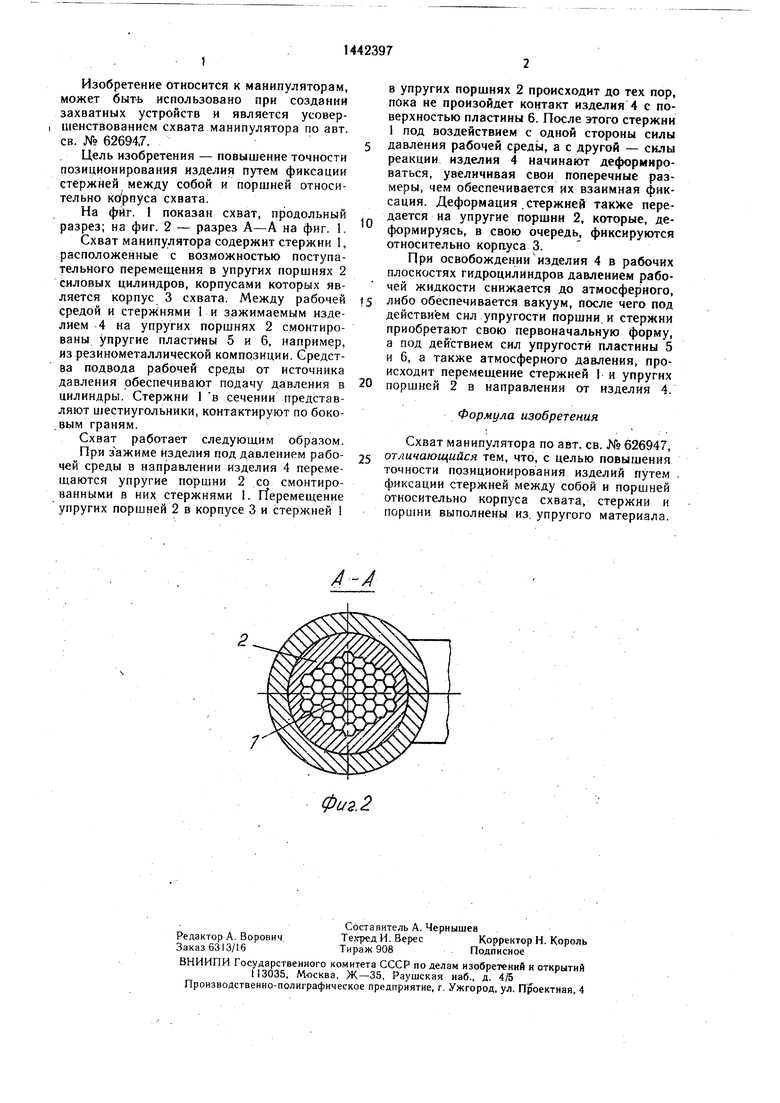
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1976 |
|
SU626947A1 |
| Схват манипулятора | 1978 |
|
SU770787A1 |
| Схват манипулятора | 1980 |
|
SU905064A1 |
| Схват манипулятора | 1989 |
|
SU1689068A1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Рука манипулятора | 1985 |
|
SU1303400A1 |
| Захватное устройство | 1990 |
|
SU1787760A1 |
| Схват промышленного робота | 1987 |
|
SU1430264A1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
Изобретение отиосится к манипуляторам, может быть использовано при создании захватных устройств. Цель изобретения - повышение точности позиционирования изделия путем фиксации стержней между собой и поршней, относительно корпуса схвата. Схват манипулятора содерм ит стержни 1, расположенные с возможностью поступательного перемещения в упругих поршнях 2 силовых цилиндров, корпусами которых является корпус 3 схвата. Торцовые стенки поршней выполнены из упругих пластин 5 и 6. При зажиме изделия давление рабочей среды перемещает упругие поршни 2 с вмонтированными в них стержнями 1. Перемещение упругих поршней 2 в корпусе 3 и стержней 1 в упругих поршнях 2 будет происходит до тех пор, пока не. произойдет контакта изделия 4 с поверхностью пластины 6. После этого стержни I под воздействием с одной стороны силы давления рабочей среды, а с другой - силы реакции изделия 4 начнут деформироваться, увеличивая свои попереч ные размеры, что обеспечивает их взаимную фиксацию. Деформация стержней 1 передается на упругие поршни 2, которые, деформируясь, в свою очередь, фиксируются относительно корпуса 3. 2 ил.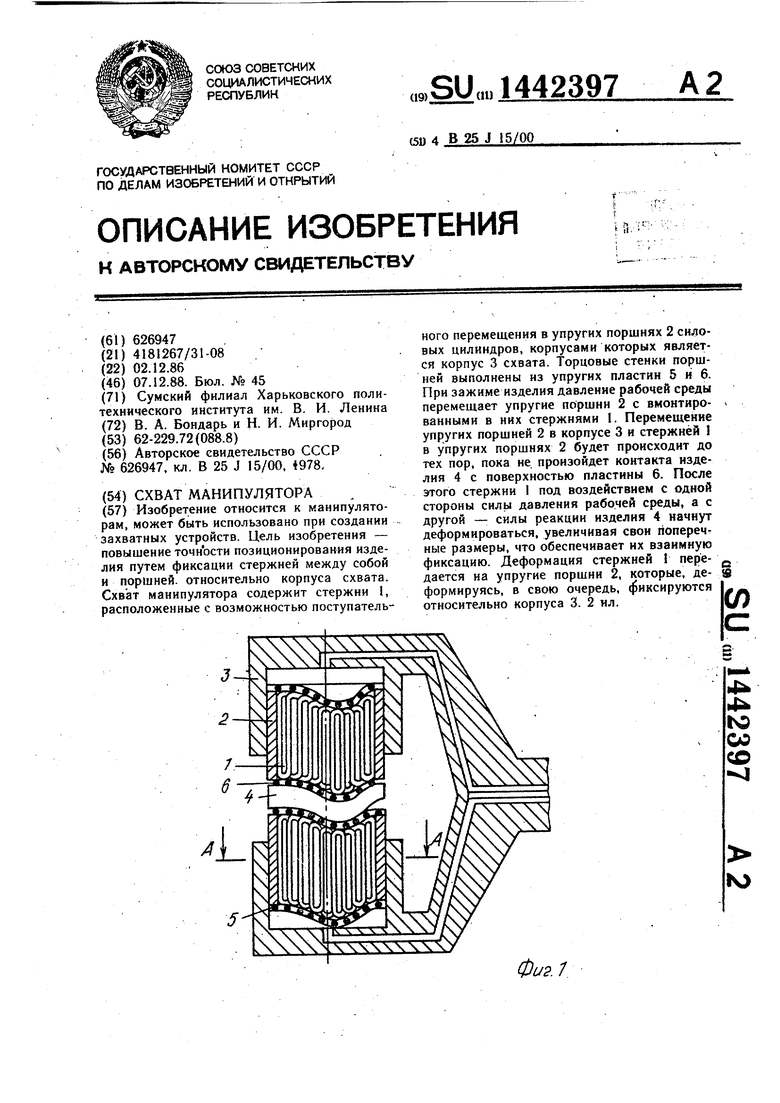
/-/
| Схват манипулятора | 1976 |
|
SU626947A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
