сл
N;
CD
о
1чЭ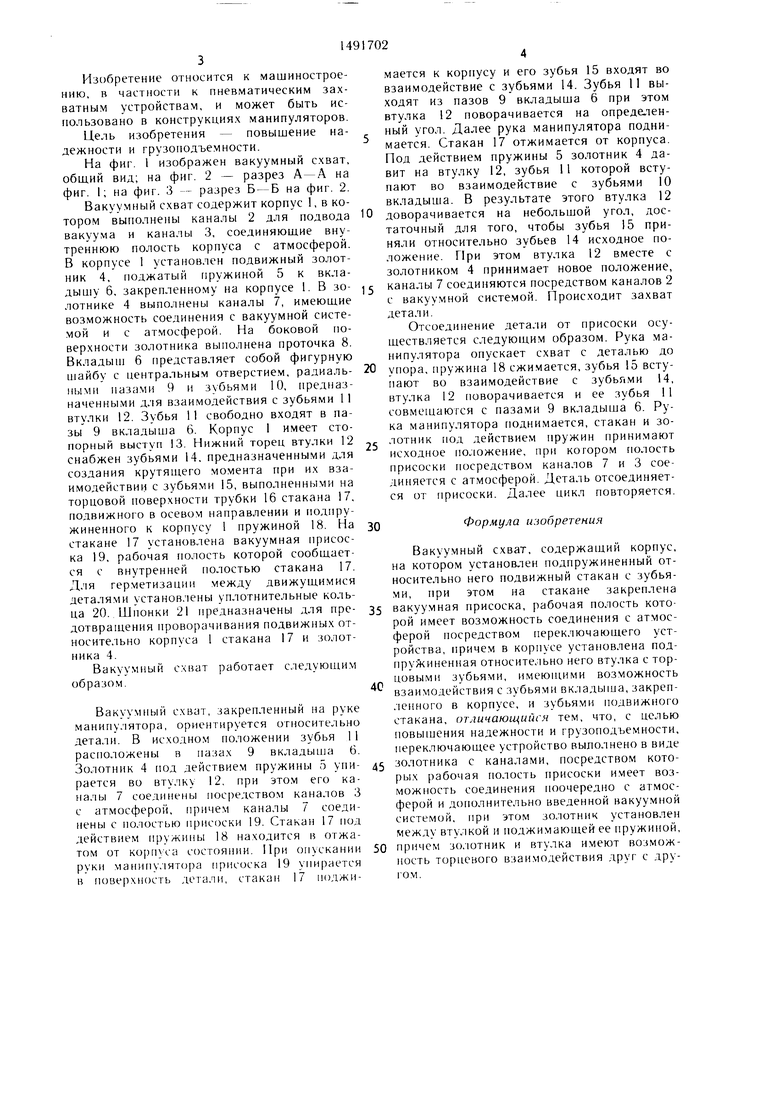
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Вакуумный схват манипулятора | 1986 |
|
SU1421533A1 |
| Автоматический многозахватный манипулятор | 1990 |
|
SU1731626A1 |
| Манипулятор | 1982 |
|
SU1007965A1 |
| Многопозиционный автомат для сборки узлов | 1990 |
|
SU1779530A1 |
| Магнитно-вакуумный захват | 1985 |
|
SU1366396A1 |
| Вакуумное захватное устройство | 1981 |
|
SU1036657A1 |
| Схват робота | 1981 |
|
SU994256A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Многопозиционный вакуумный захват | 1988 |
|
SU1662844A1 |

Изобретение относится к области машиностроения ,в частности, к пневматическим захватным устройствам, и может быть использовано в конструкциях манипуляторов. Целью изобретения является повышение грузоподъемности и надежности. Для этого корпус 1 снабжен золотником 4 с каналами 7. Подпружиненный пружиной 5 относительно корпуса золотник 4 упирается во втулку 12, которая, в свою очередь, упирается во вкладыш 6. На корпусе установлен также подпружиненный относительно него стакан 17 с присоской 19. При каждом нажатии на присоску 19 золотник 4 занимает одно из крайних положений. При одном положении каналы 7 соединяются посредством каналов 2 с вакуумной системой и происходит захват детали. При другом положении каналы 7 посредством каналов 3 соединяются с атмосферой и происходит сброс детали. Перемещение и фиксация положения золотника 4 осуществляется за счет взаимодействия зубьев 14 и 15, а также зубьев втулки 12 и вкладыша 6. 3 ил.
15
Фиг. Г
16 19
18
Из1)6ретение относится к машиностроению, в частности к пневматическим захватным устройствам, и может быть использовано в конструкциях манипуляторов.
Цель изобретения - повышение надежности и грузоподъемности.
На фиг. 1 изображен вакуумный схват, обш,ий вид; на фиг. 2 - разрез А-А на фиг. I; на фиг. 3 - разрез Б - Б на фиг. 2.
Вакуумный схват содержит корпус 1, в котором выполнены каналы 2 для подвода вакуума и каналы 3, соединяюш,ие внутреннюю полость корпуса с атмосферой. В корпусе 1 установлен подвижный золотник 4, поджатый пружиной 5 к вкла- дьш1у 6, закрепленному на корпусе 1. В зо- лотнике 4 выполнены каналы 7, имеюшие возможность соединения с вакуумной системой и с атмосферой. На боковой поверхности золотника выполнена проточка 8. Вкладын 6 представляет собой фигурную с центральным отверстием, радиаль- пыми пазами 9 и зубьями 10, предназначенными для взаимодействия с зубьями 11 втулки 12. Зубья 11 свободно входят в пазы 9 вкладыша 6. Корпус 1 имеет стопорный выступ 13. Нижний торец втулки 12 снабжен зубьями 14, предназначенными для создания крутящего момента при их взаимодействии с зубьями 15, выполненными на торцовой поверхности трубки 16 стакана 17, подвижного в осевом направлении и подпружиненного к корпусу 1 пружиной 18. На стакане 17 установлена вакуумная присоска 19, рабочая полость которой сообплает- ся с внутренней полостью стакана 17. Для герметизации между движущимися деталями установлены уплотнительные кольца 20. Шпонки 21 предназначены для пре- дотвращения проворачивания подвижных относительно корпуса 1 стакана 17 и золотника 4.
Вакуумный схват работает следующим
образом.
Вакуум1{ый схват, закрепленный на руке манипулятора, ориентируется относительно детали. В исходном положении зубья 1 1 расположены в пазах 9 вкладыша 6. Золотник 4 под действием пружины 5 упи- рается во втулку 12, при этом его каналы 7 соединены посредством каналов 3 с атмосферой, причем каналы 7 соединены с полостью присоски 19. Стакан 17 под действием пружины 18 находится к отжатом от корпуса состоянии. При опускании руки манипулятора фисоска 19 упирается в поверхность детали, стакан 17 поджи5
0 О 5
0
б 0
мается к корпусу и его зубья 15 входят во взаимодействие с зубьями 14. Зубья 11 выходят из пазов 9 вкладыша 6 при этом втулка 12 поворачивается на определенный угол. Далее рука манипулятора поднимается. Стакан 17 отжимается от корпуса. Под действием пружины 5 золотник 4 давит на втулку 12, зубья 11 которой вступают во взаимодействие с зубьями 10 вкладыша. В результате этого втулка 12 доворачивается на небольшой угол, достаточный для того, чтобы зубья 15 приняли относительно зубьев 14 исходное положение. При этом втулка 12 вместе с золотником 4 принимает новое положение, капалы 7 соединяются посредством каналов 2 с вакуумной системой. Происходит захват детали.
Отсоединение дета.чи от присоски осуществляется следующим образом. Рука манипулятора опускает схват с деталью до упора, пружипа 18 сжимается, зубья 15 вступают во взаимодействие с зубьпми 14, втулка 12 поворачивается и ее зубья 11 совмещаются с пазами 9 вкладьииа 6. Рука манипулятора поднимается, стакан и золотник под действием пружин принимают исходное по.южение, при когором полость присоски посредством каналов 7 и 3 сое- дипяется с атмосферой. Деталь отсоединяется от фисоски. Далее цикл повторяется.
Формула изобретения
Вакуумный схват, содержащий корпус, на котором установлен подпружиненный относительно него подвижный стакан с зубьями, при этом на стакане закреплена вакуумная присоска, рабочая полость которой имеет возможность соединения с атмосферой носредством переключающего устройства, причем в корпусе установлена подпружиненная относительно него втулка с торцовыми зубьями, имеющими возможность взаимодействия с зубьями вкладыша, закрепленного в корпусе, и зубьями подвижного стакана, отличающийся тем, что, с целью ювышения надежности и грузоподъемности, переключающее устройство выполнено в виде золотника с каналами, посредством которых рабочая полость присоски и.меет возможность соединения поочередно с атмосферой и дополнительно введенной вакуумной системой, при этом золотник установлен между втулкой и поджимающей ее пружиной, причем зо, 1отник и втулка имеют возможность торцевого взаимодействия друг с другом.
х
5-6 Ч Повернуто
Фаг. 5
Фаз. 2
| Вакуумный захват | 1972 |
|
SU439456A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
