-t
1 4 1чЭ
4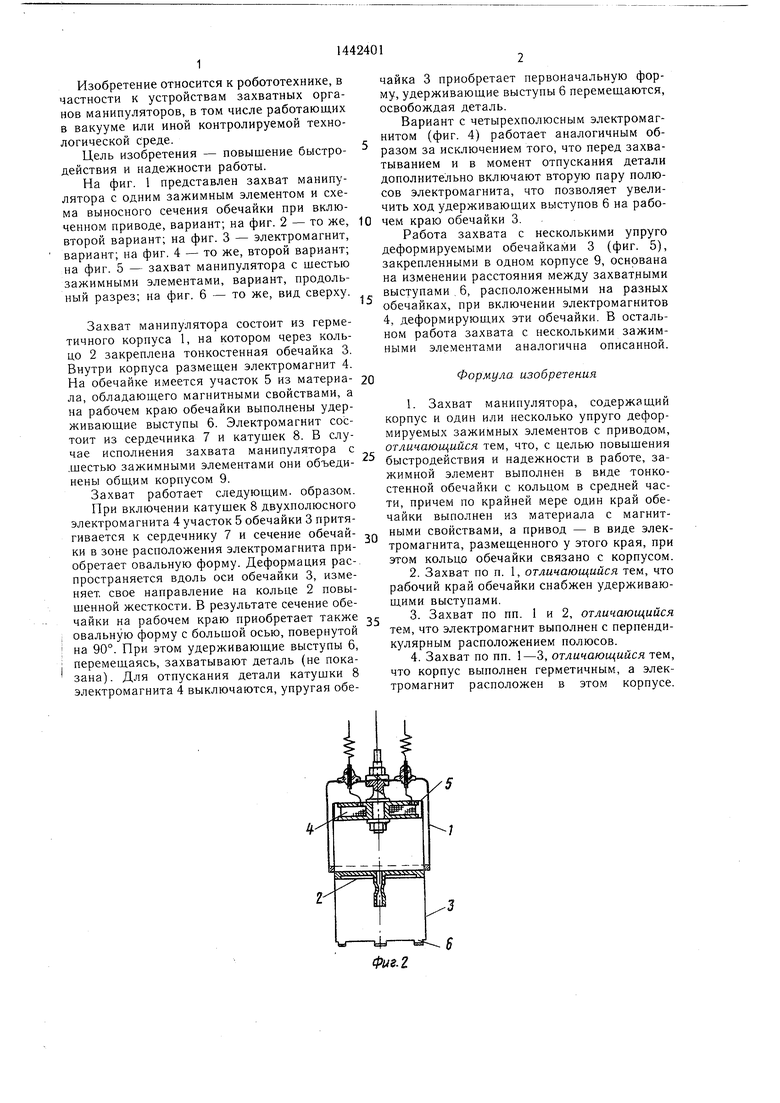
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для герметизированного пространства | 1988 |
|
SU1618651A1 |
| СХВАТ МАНИПУЛЯТОРА | 2008 |
|
RU2381892C1 |
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| Схват манипулятора | 1990 |
|
SU1785896A1 |
| Захватное устройство | 1990 |
|
SU1787760A1 |
| Привод поступательного перемещения | 1990 |
|
SU1812099A1 |
| Магнитно-вакуумный захват | 1991 |
|
SU1811486A3 |
| Захват манипулятора | 1986 |
|
SU1399115A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА, ОБРАБОТКИ И ПЕРЕМЕЩЕНИЯ ОБЪЕКТОВ | 2002 |
|
RU2297380C2 |

Изобретение относится к области робототехники, в частности к устройствам захватных органов, и может быть применено в манипуляторах, работающих в вакууме или иной контролируемой среде. Цель изобретения - повышение быстродействия и надежности работы. При включении электромагнита 4 деформации обечайки 3 распространяются от участка 5 обечайки вдоль ее оси, изменяя свое направление на кольце 2, и доходят до рабочего края обечайки 3, изменяя расстояние между удерживающими выступами 6. Несколько обечаек 3 с электромагнитным приводом могут быть разме- щеуы на одном корпусе. 3 з.п.ф-лы, 6 ил.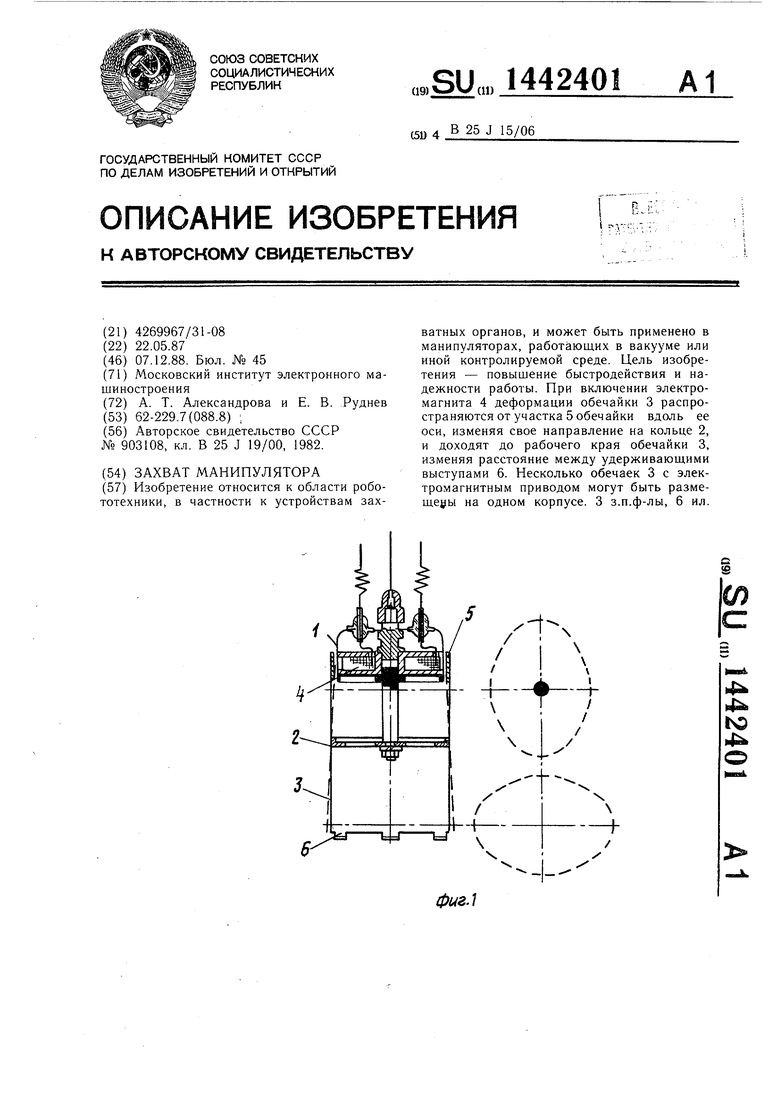
фие-1
Изобретение относится к робототехнике, в частности к устройствам захватных органов манипуляторов, в том числе работающих в вакууме или иной контролируемой технологической Среде.
Цель изобретения - повышение быстродействия и надежности работы.
На фиг. 1 представлен захват манипулятора с одним зажимным элементом и схема выносного сечения обечайки при включенном приводе, вариант; на фиг. 2 - то же, второй вариант; на фиг. 3 - электромагнит, вариант; на фиг. 4 - то же, второй вариант; на фиг. 5 - захват манипулятора с шестью зажимными элементами, вариант, продольный разрез; на фиг. 6 - то же, вид сверху.
Захват манипулятора состоит из герметичного корпуса 1, на котором через кольцо 2 закреплена тонкостенная обечайка 3. Внутри корпуса размеш,ен электромагнит 4. На обечайке имеется участок 5 из материа- 20 ла, обладаюш,его магнитными свойствами, а на рабочем краю обечайки выполнены удер- живаюш,ие выступы 6. Электромагнит состоит из сердечника 7 и катушек 8. В случае исполнения захвата манипулятора с
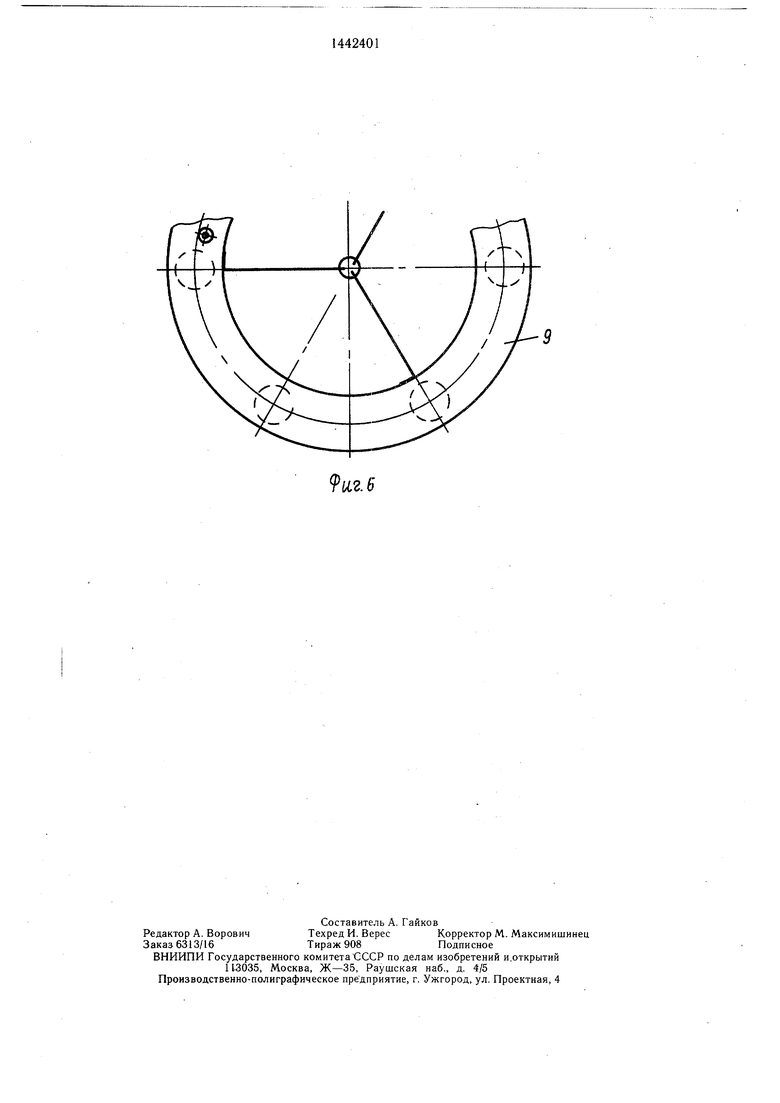
Работа захвата с несколькими упруго деформируемыми обечайками 3 {фиг. 5), закрепленными в одном корпусе 9, основана на изменении расстояния между захватными выступами , 6, расположенными на разных обечайках, при включении электромагнитов 4, деформирующих эти обечайки. В остальном работа захвата с несколькими зажимными элементами аналогична описанной.
Формула изобретения
. Захват манипулятора, содержащий корпус и один или несколько упруго деформируемых зажимных элементов с приводом, отличающийся тем, что, с целью повышения
.шестью зажимными элементами они объеди- быстродействия и надежности в работе, за30
нены общим корпусом 9.
Захват работает следующим, образом.
При включении катушек 8 двухполюсного электромагнита 4 участок 5 обечайки 3 притягивается к сердечнику 7 и сечение обечайки в зоне расположения электромагнита приобретает овальную форму. Деформация распространяется вдоль оси обечайки 3, изменяет, свое направление на кольце 2 повышенной жесткости. В результате сечение обечайки на рабочем краю приобретает также 5 овальную форму с большой осью, повернутой на 90°. При этом удерживающие выступы 6, перемещаясь, захватывают деталь (не показана). Для отпускания детали катушки 8 электромагнита 4 выключаются, упругая обежимнои элемент выполнен в виде тонкостенной обечайки с кольцом в средней части, причем по крайней мере один край обечайки выполнен из материала с магнитными свойствами, а привод - в виде электромагнита, размещенного у этого края, при этом кольцо обечайки связано с корпусом.
0
чайка 3 приобретает первоначальную форму, удерживающие выступы 6 перемещаются, освобождая деталь.
Вариант с четырехполюсным электромагнитом (фиг. 4) работает аналогичным образом за исключением того, что перед захватыванием и в момент отпускания детали дополнительно включают вторую пару полюсов электромагнита, что позволяет увеличить ход удерживающих выступов 6 на рабо- 0 чем краю обечайки 3.
Работа захвата с несколькими упруго деформируемыми обечайками 3 {фиг. 5), закрепленными в одном корпусе 9, основана на изменении расстояния между захватными выступами , 6, расположенными на разных обечайках, при включении электромагнитов 4, деформирующих эти обечайки. В остальном работа захвата с несколькими зажимными элементами аналогична описанной.
Формула изобретения
. Захват манипулятора, содержащий корпус и один или несколько упруго деформируемых зажимных элементов с приводом, отличающийся тем, что, с целью повышения
0
5
жимнои элемент выполнен в виде тонкостенной обечайки с кольцом в средней части, причем по крайней мере один край обечайки выполнен из материала с магнитными свойствами, а привод - в виде электромагнита, размещенного у этого края, при этом кольцо обечайки связано с корпусом.
9ii2.5
9И2.6
| Устройство для перемещения деталей | 1979 |
|
SU903108A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
