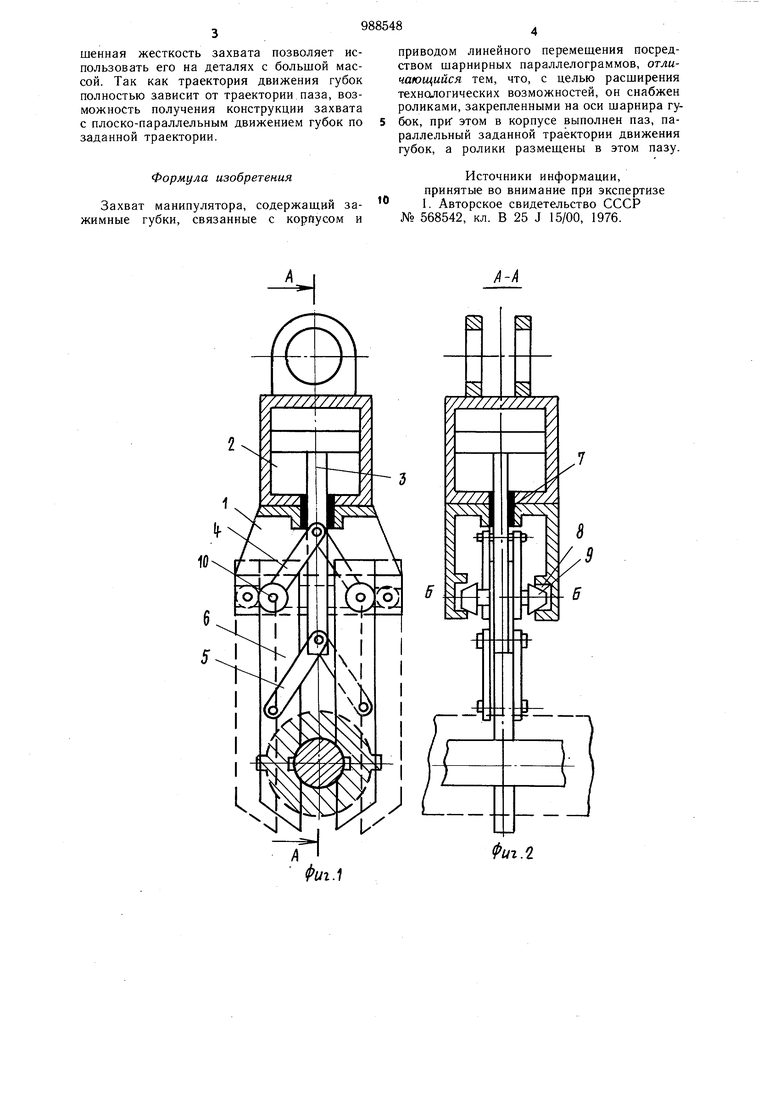
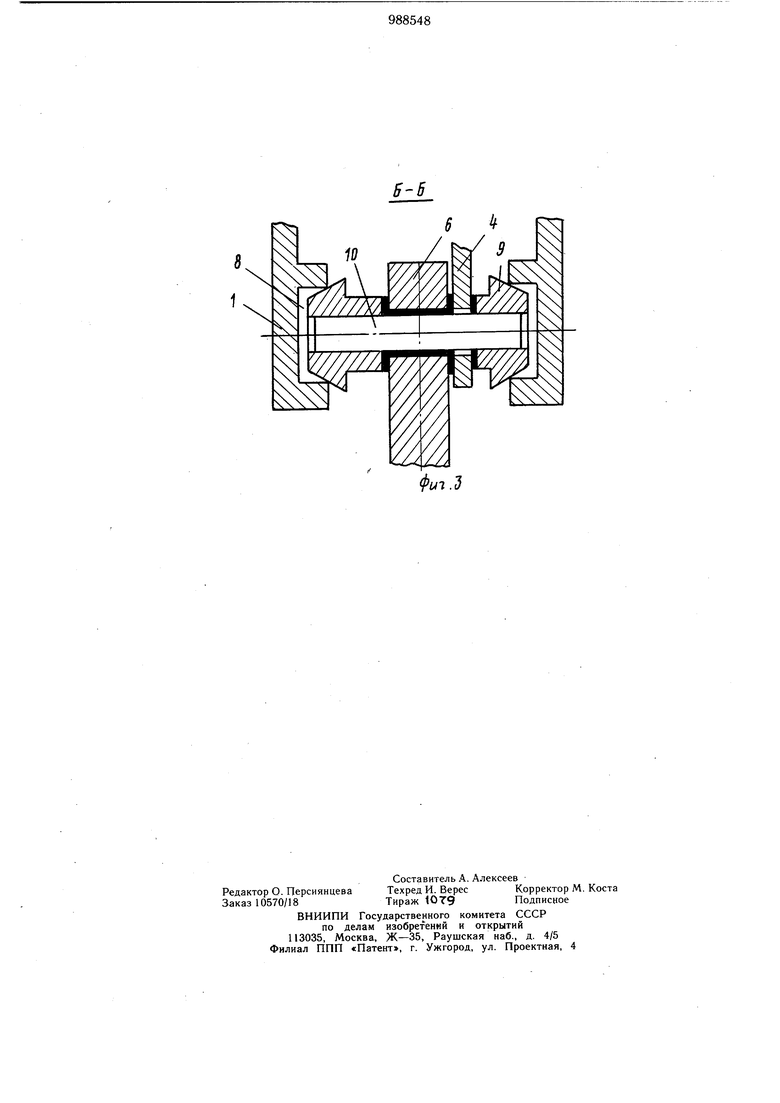
Изобретение относится к машиностроению, а именно к робототехнике. Известен захват манипулятора, содержащий зажимные губки, связанные с корпусом и приводом линейного перемещения посредством щарнирных параллелограммов 1 . Недостатком известного захвата манипулятора являются узкие технологические возможности, заключающиеся в малом диапазоне захватываемых деталей. Целью изобретения является расширение технологических возможностей. Цель достигается тем, что захват манипулятора снабжен роликами, закрепленными на оси шарнира губок, при этом в корпусе выполнен паз, параллельный заданной траектории движения губок, а ролики размещены в этом пазу. На фиг. 1 изображен захват манипулятора, разрез; на фиг. 2 - разрез А-А на фиг. I; на фиг. 3 - разрез Б-Б на фиг. 2. Захват манипулятора содержит корпус 1, силовой цилиндр 2 с порщнем и штоком 3, с которым через рычаги 4 и 5 шарнирно связаны губки 6, так что кинематически шток. рычаги и губка образуют шарнирно-рычажной параллелограмм. Корпус 1 имеет направляющую 7 ДЛЯштока и паз 8, в который на роликах 9 с помощью оси 10 шарнирно установлены губки 6, связанные этой осью с рычагом 4. Захват работает следующим образом. При Движении штока 3 вниз (по чертежу) рычаг 4 через ось 10 и ролик 9 упирается в нижнюю кромку паза 8, что приводит к повороту рычага и раскрытию губок захвата. При движении штока вверх рычаг 4 упирается роликом 9 в верхнюю кромку паза: происходит смыкание губок захвата, при этом губки совершают движение вдоль оси паза параллельно одна другой, так что центр захватываемой детали остается неизменным при различных ее диаметрах до размера, равного двойной длине рычага параллелограмма. Применение захвата предлагаемой конструкции позволяет сократить количество типоразмеров захватов для широкого диапазона размеров захватываемых деталей и значительно снизить стоимость дополнительной оснастки манипуляторов при изменении номенклатуры производства деталей Повышенная жесткость захвата позволяет использовать его на деталях с большой массой. Так как траектория движения губок полностью зависит от траектории паза, возможность получения конструкции захвата с плоско-параллельным движением губок по заданной траектории.
Формула изобретения
Захват манипулятора, содержащий зажимные губки, связанные с корпусом и
приводом линейного перемещения посредством щарнирных параллелограммов, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен роликами, закрепленными на оси шарнира губок, при этом Б корпусе выполнен паз, параллельный заданной траектории движения губок, а ролики размещены в этом пазу.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 568542, кл. В 25 J 15/00, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1977 |
|
SU667396A1 |
| Захват | 1977 |
|
SU663577A1 |
| Схват | 1983 |
|
SU1098790A1 |
| Захватное устройство | 1989 |
|
SU1708603A1 |
| Захватное устройство | 1987 |
|
SU1445954A1 |
| Захват манипулятора | 1986 |
|
SU1313701A1 |
| Захватное устройство | 1985 |
|
SU1283098A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Схват | 1987 |
|
SU1440704A1 |
| Установка для подачи листов к гильотинным ножницам | 1981 |
|
SU1016093A1 |
S 4
Фи1.3
