4
| название | год | авторы | номер документа |
|---|---|---|---|
| Кисть манипулятора | 1987 |
|
SU1437217A1 |
| Захватное устройство | 1985 |
|
SU1283092A1 |
| Захват манипулятора | 1986 |
|
SU1399115A1 |
| Захватное устройство | 1987 |
|
SU1445954A1 |
| Захватное устройство | 1985 |
|
SU1283098A1 |
| Захватное устройство | 1988 |
|
SU1632585A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Захватное устройство | 1986 |
|
SU1323371A1 |
| Кисть манипулятора | 1987 |
|
SU1421532A1 |
| Схват | 1983 |
|
SU1119842A1 |
Изобретение относится к машиностроению, а именно к захватам манипуляторов. Целью изобретения является расширение технологических возможностей. Изобретение позволяет осуществлять поворот детали. Для этого на корпусе 1 установлена качающаяся траверса 12, на которой шарнирно закреплены звенья 8 11 шарнирно - параллелограммных механизмов. Покачивание траверсы обеспечивает поворот зажимных губок 3 с деталью между ними вокруг оси детали. 1 ил.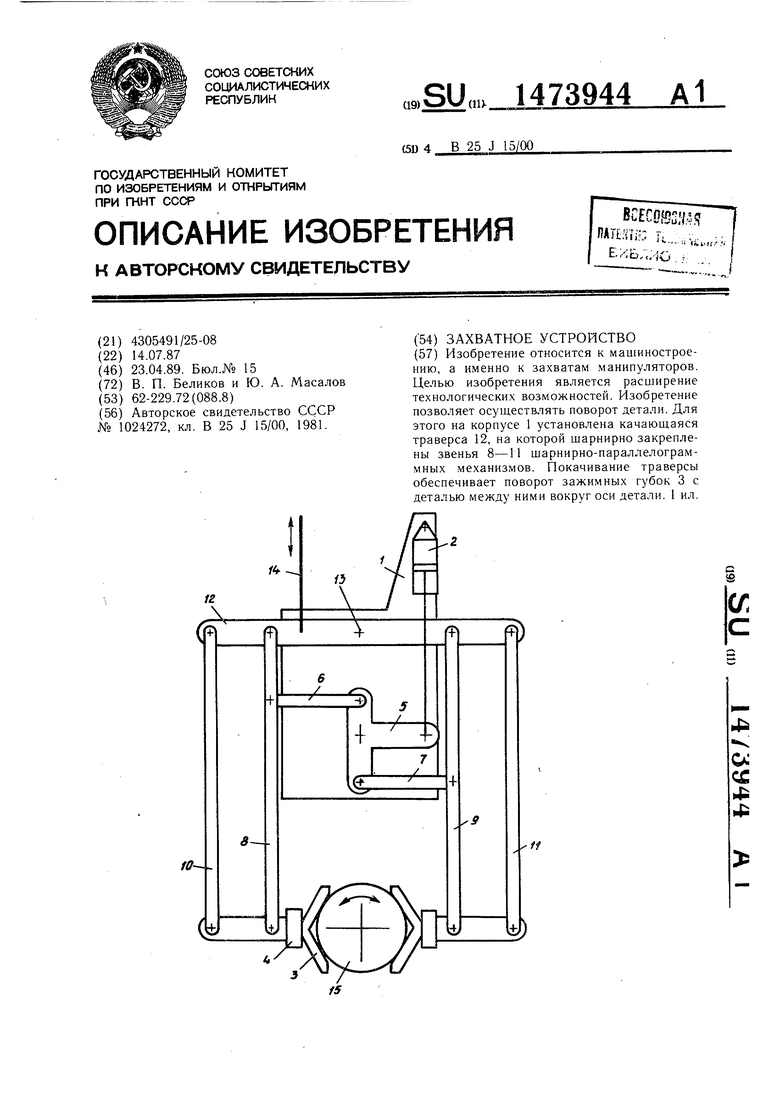
8
&
о:
СЈ 44и
Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов, и может быть использовано в случаях, когда необходимо манипулировать обрабатываемой деталью в ограниченном пространстве.
Цель изобретения - расширение технологических возможностей.
На чертеже изображено захватное уст- ройство.
На корпусе 1 установлен привод 2 губок 3, имеющих устройства 4 регулировки. Привод 2 выполнен в виде пневмоцилиндра со штоком, соединенным с плечом трехплечего рычага 5, с другими его плечами шарнирно соединены тяги 6 и 7, которые приводят в движение рычаги 8 и 9, входящие с рычагами 10 и 11 в шарнирно-параллелограммные механизмы. Траверса 12, которая шарнирно соединяет концы рычагов 8, 10, 9 и 11, мо- жет качаться вокруг оси 13 тягой 14 от дополнительного привода. Между губками 3 зажата деталь 15.
Устройство работает следующим образом.
Для зажатия детали привод 2 поворачивает трехплечий рычаг 5 по часовой стрел- ке. Тяги 6 и 7 сближают рычаги 8 и 9,
губки 3 фиксируют деталь 15. Поворот детали 15 без ее разжатия осуществляется поворотом траверсы 12 вокруг оси 13 тягой 14 от дополнительного привода. При этом оси губок, и траверса остаются параллельными между собой. Рычаги 8-11 параллельны между собой.
Для симметричного разведения губок 3 схвата соотношение между плечами трехплечего рычага 5, ко которым присоединены тяги 6 и 7, должно устанавливаться в соответствии с расстояниями от точек содине- ния этих тяг с рычагами 8 и 9 до их шарнирных концов.
Формула изобретения
Захватное устройство, содержащее корпус, губки, установленные на звеньях шар- нирно-параллелограммных механизмов, и привод их сведения, отличающееся тем, что, с целью расширения технологических возможностей, звенья шарнирно-параллелограм иных механизмов, параллельных звеньям, на которых закреплены губки, выполнены в виде траверсы, установленной на корпусе с возможностью поворота от дополнительно введенного привода.
| Захват манипулятора | 1982 |
|
SU1024272A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
