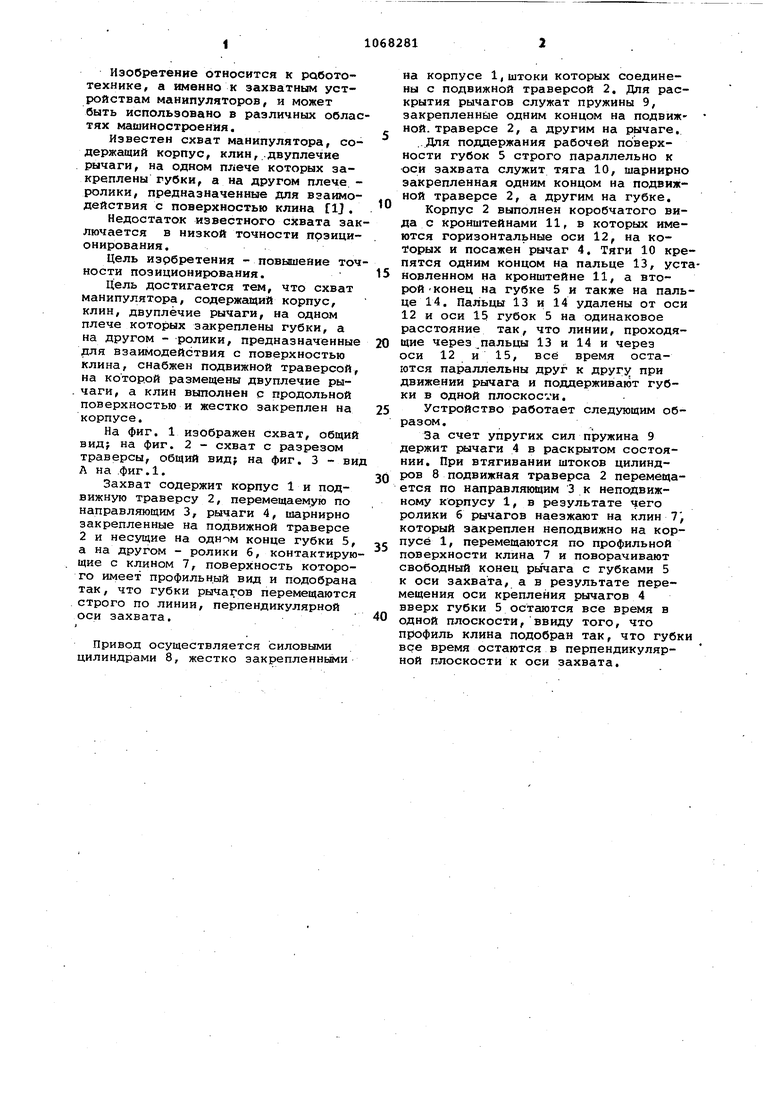
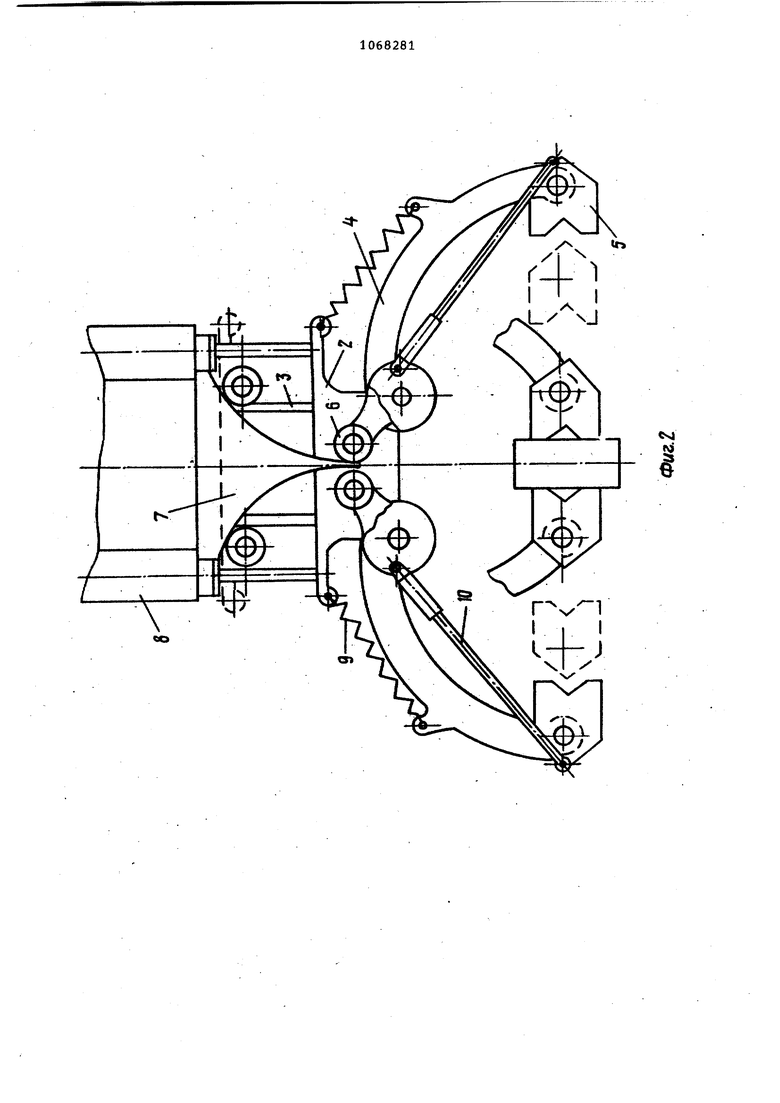
Изобретение относится к робототехнике, а именно к захватным устройствам манипуляторов, и может быть использовано в различных обла тях машиностроения. Известен схват манипулятора, со держащий корпус, клин,.двуплечие рычаги, на одном плече которых закреплены губки, а на другом плече ролики, предназначенные для взагало действия с поверхностью клина flj. Недостаток известного схвата за лючается в низкой точности позиционирования. Цель изрбретения - повышение точ ности позиционирования. Цель достигается тем, что схват манипулятора, содержащий корпус, клин, двуплечие рычаги, на одном плече которых закреплены губки, а на другом - ролики, предназначенные для взаимодействия с поверхностью клина, снабжен подвижной траверсой на которой размещены двуплечие рычаги, а клин выполнен с продольной поверхностью и жестко закреплен на корпусе. На фиг. 1 изображен схват, общий вид; на фиг. 2 - схват с разрезом траверсы, общий вид на фиг. 3 - ви А на .фиг. 1. Захват содержит корпус 1 и подвижную траверсу 2, перемещаемую по направляющим 3, рычаги 4, шарнирно закрепленные на подвижной траверсе 2 и несущие на конце губки 5, а на другом - ролики б, контактирую щие с клином 7, поверхность которого имеет профильный вид и подобрана так, что губки рычагов перемещаются строго по линии, перпендикулярной оси захвата. I- . Привод осуществляется силовыми цилиндрами 8, жестко закрепленными на корпусе 1, штоки которых соединены с подвижной траверсой 2. Для раскрытия рычагов служат пружины 9, закрепленные одним концом на подвижной, траверсе 2, а другим на рычаге. .Для поддержания рабочей поверхности губок 5 строго параллельно к оси захвата служит тяга 10, шарнирно закрепленная одним концом на подвижной траверсе 2, а другим на губке. Корпус 2 выполнен коробчатого вида с кронштейнами 11, в которых имеются горизонтальные оси 12, на которых и посажен рычаг 4. Тяги 10 крепятся одним концом на пальце 13, установленном на кронштейне 11, а второй Конец на губке 5 и также на пальце 14. Пальцы 13 и 14 удалены от оси 12 и оси 15 губок 5 на одинаковое расстояние так, что линии, проходящие через пальцы 13 и 14 и через оси 12 и 15, всё время остаются параллельны друг к , при движении рычага и поддерживают губки в одной плоскости. Устройство работает следующим образом.. За счет упругих сил пружина 9 держит рычаги 4 в раскрытом состоянии. При втягивании штоков цилиндров 8 подвижная траверса 2 перемещается по направляющим 3 к неподвижному корпусу 1, в результате чего ролики б рычагов наезжают на клин 7, который закреплен неподвижно на корпусе 1, перемещаются по профильной поверхности клина 7 и поворачивают свободный конец рычага с губками 5 к оси захвата, а в результате перемещения оси крепления рычагов 4 вверх губки 5 остаются все время в одной плоскости, ввиду того, что профиль клина подобран так, что губки все время остаются в перпендикулярной плоскости к оси захвата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1980 |
|
SU876421A1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2376130C1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Захватное устройство | 1987 |
|
SU1445954A1 |
| Устройство для перемещения объектов в рабочую зону | 1983 |
|
SU1122503A1 |
| Схват | 1985 |
|
SU1289679A1 |
| Захват манипулятора | 1984 |
|
SU1333573A1 |
| Схват промышленного робота | 1985 |
|
SU1305031A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
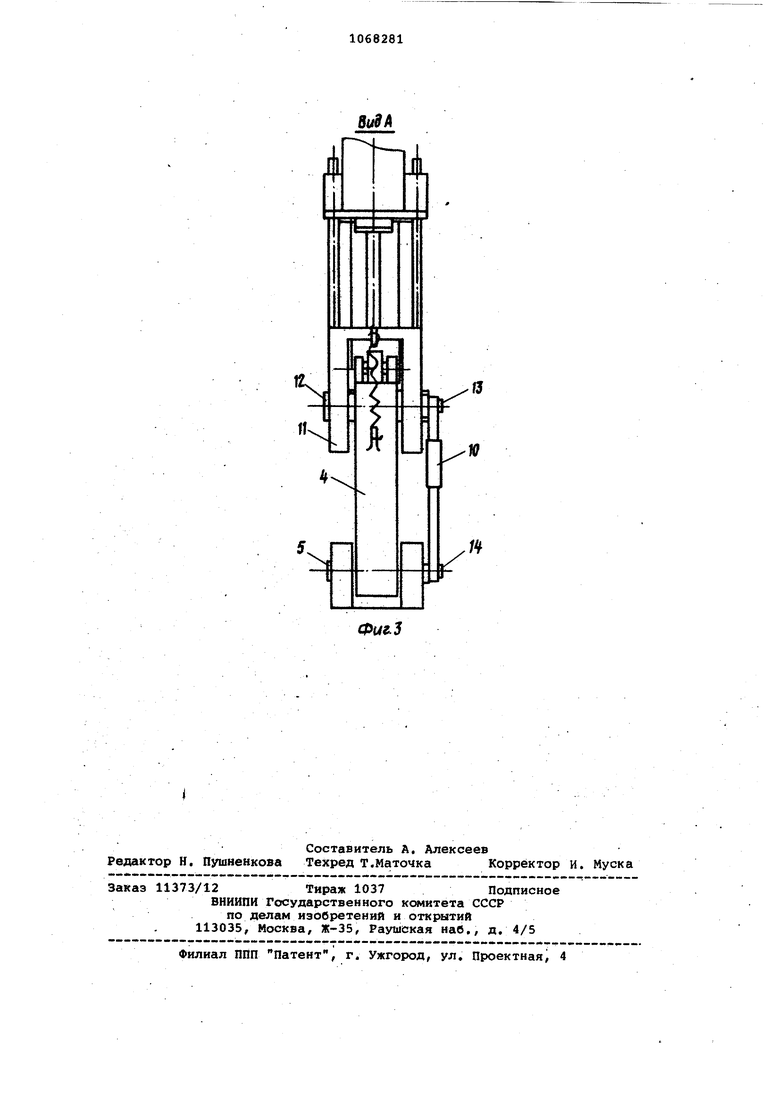
СХВАТ МАНИПУЛЯТОРА, содержащий корпус, клин, двуплечие рычагй, на одном плече которых закреплены губки, а на другом - ролики,предназначенные для взаимодействия с поверхностью клина, о т.л и ч а ю щ и и с я тем, что, с целью повышения точности позиционирования, он снабжен подвижной траверсой, на которой размещены двуплечие рычаги, а клин выполнен с профильной поверхностью и жестко закреплен на корпусе (/) С Q С D 3d X) ND X)
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват манипулятора | 1976 |
|
SU582175A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
