ная с блоком 2 мишеней стойками 19, фиксатор 20, 1гаправляющие 30, приспособление 31 для дистанционного захвата, подставка 32. Устройство позволяет проводить дистанционную
установку и эвакуацию мишенного узла при проведении регламентных работ по замене элементов мишенного узла и существенно сокращает затраты на проведение этих раб от. 6 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выбивки болтов и обрушения футеровочных плит барабанных мельниц | 1990 |
|
SU1813569A1 |
| Стенд для контрольных испытаний пневматических отбойных молотков | 1987 |
|
SU1452978A1 |
| Устройство для поштучной выдачи плоских заготовок из стопы | 1986 |
|
SU1404147A1 |
| Устройство для отделения заготовок от стопы | 1986 |
|
SU1360862A1 |
| Перегрузочное устройство горной машины | 1987 |
|
SU1579955A1 |
| Погрузочный манипулятор | 1984 |
|
SU1216148A1 |
| Пневмопривод машины для контактной точечной сварки | 1990 |
|
SU1759582A1 |
| Устройство для маркировки изделий | 1986 |
|
SU1369888A1 |
| Устройство для подачи пустых и отвода наполненных коробок | 1983 |
|
SU1221065A1 |
| Автомат для обработки отверстий в деталях | 1986 |
|
SU1342679A1 |
Изобретение относится к области ускорительной техники и может быть использовано в установках ускорителей элементарных частиц. Цель изобретения - повышение эффективности - достигается за счет обеспечения возможности дистанционной установки и эвакуации мишенного узла и автономного выполнения привода механизма перемещения мишений и мишенного узла. Устройство содержит мишенный узел 1, состоящий из блока 2 мишеней с мишенями 3 и механизма 4 перемещения мишеней. Привод выполнен в виде пневмоцилиндра 5. На конце штока 6 привода размещена собачка 7. Механизм перемещения содержит колесо 12 с радиально расположенными пальцами 13. На чертеже также показаны подвижная платформа 18, связанная с блоком 2 мишеней стойками 19, фиксатор 20, направляющие 30, приспособление 31 для дистанционного захвата, подставка 32. Устройство позволяет производить дистанционную установку и эвакуацию мишенного узла при проведении регламентных работ по замене элементов мишенного узла и существенно сокращает затраты на проведение этих работ. 6 ил.
20
t
Изобретение относится к области ускорительной техники и может быть использовано в мишенных станциях ускорителей элементарных частиц.
Цель изобретения - повышение эф- 5 фективности за счет обеспечения возможности дистанционной установки и эвакуации мишенного узла, ко-Лэрая достигается при автономном выполнении привода механизма перемещения Ю мишеней и мишенного узла.
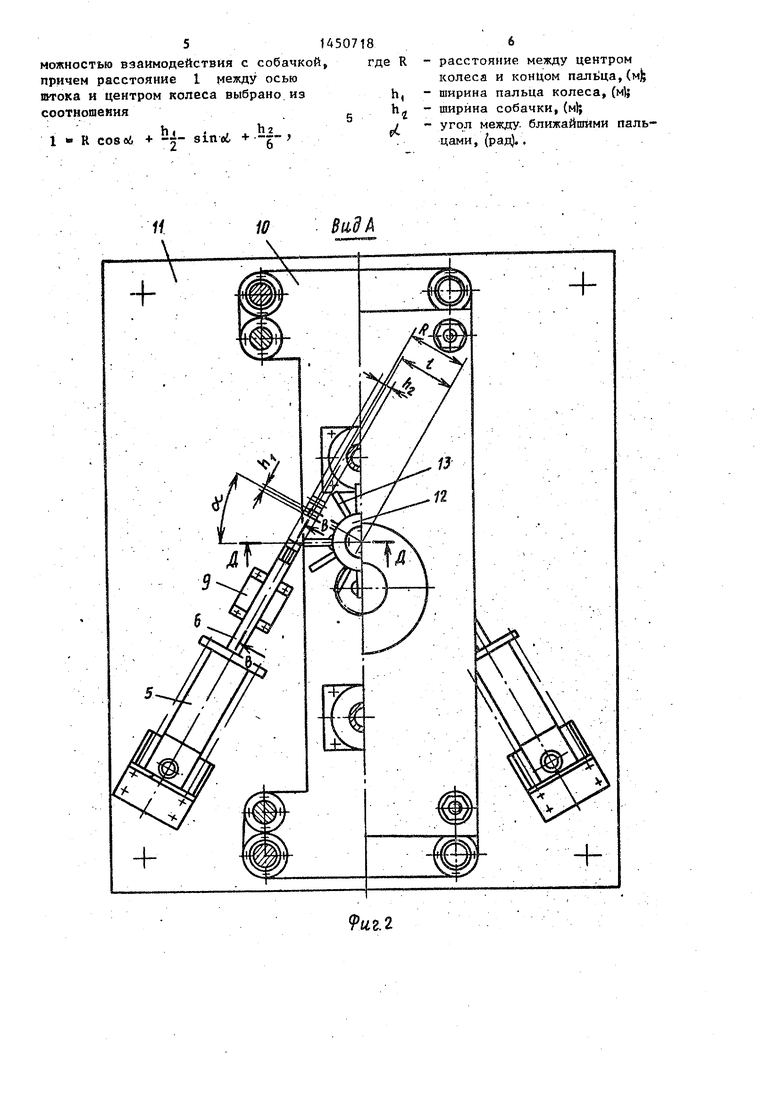
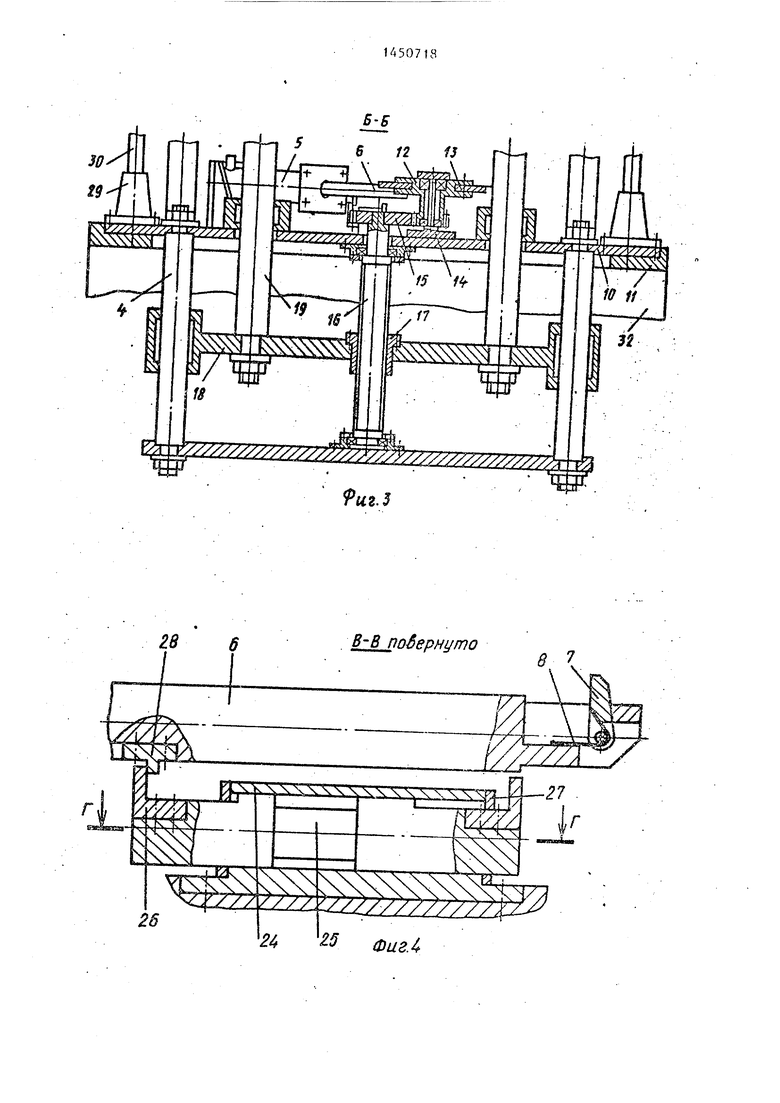
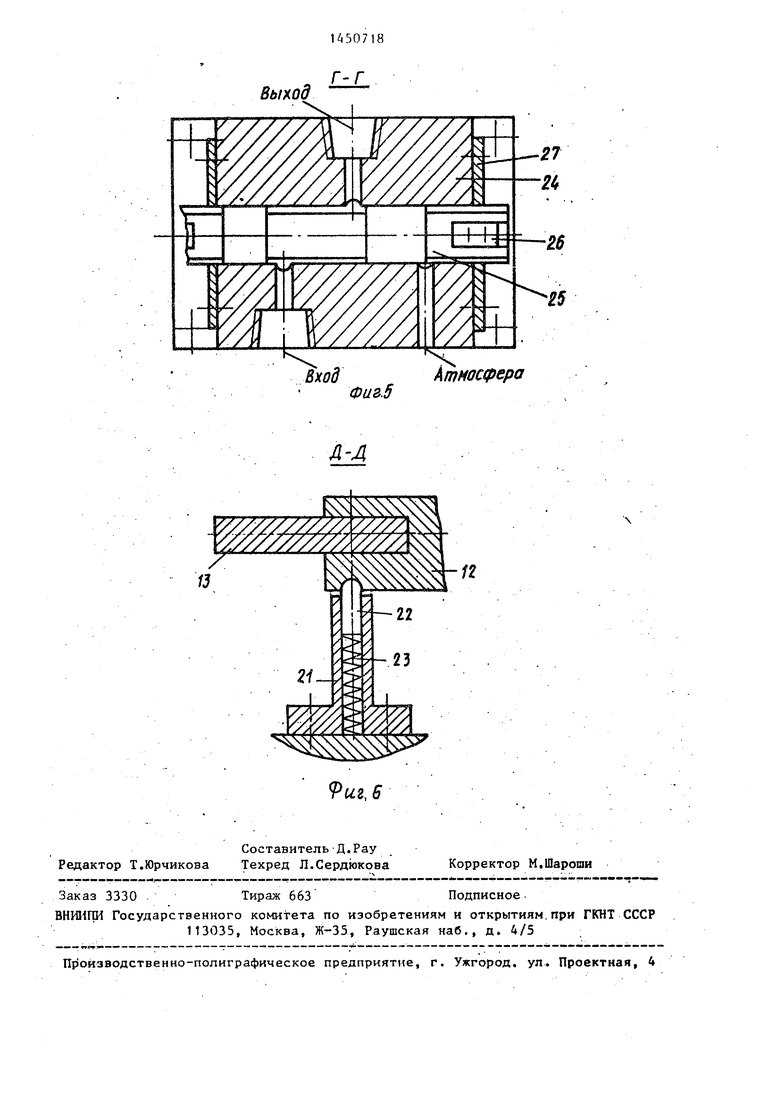
На фиг.1 изображён общий вид мишенного устройства; на фиг.2 - вид А на фиг.1| на фиг.З - сечение Б-Б на фиг.1; на фиг.4 - сечение В-В на 5 фиг.2; на фиг,5 - сечение Г-Г на фиг.4; на фиГ.6 - сечение Д-Д на фиг.2,
Мишенное устройство содержит ми- щенный узел 1, состоящий из блока 2 с четырьмя мишенями 3 и механизма 4 перемещения мишеней, -привод, выполненный в виде пневмоцилиндра 5 одностороннего действия с пружинным возвратом. На конце штока 6 привода размещена собачка 7, подпруло ненная пружиной 8. Узел для контроля перемещения выполнен в виде пневмораспре- делителя 9. На плите 10 смонтирован мишенный узел 1, а на плите 11 смонтированы два пневмоцилиндра 5 и два цневмораспределителя 9 (два привода необходимы для обеспечения 1 еверса) . Механизм перемещения мишеней содержит колесо 12 с равномерно распре- 35 деленными по окружности, радиально расположенными пальцами 13, Колесо 12 установлено на оси 14 и посредством зубчатого венца сопряжено с зубчатым колесом 15, кот орое закреп- 40 лено на винте 16. С винтом 16 связана гайка 17, которая .закреплена на подвижной платформе 18,связанной с блоком 2 мишерей стойками 19. Механизм перемещения мишеней содержит 45 также фиксатор 20, состоящий из корпуса 21, стопора 22 и пружины 23. Пневмораспределитель 9 содержит кор25
30
пус 24 с тремя отверстиями для входа и выхода сжатого воздуха.Внутри корпуса 24 расположен золотник 25 с закрепленными на его концах кронштейнами 26. Для ограничения хода золотника 25 на корпусе 24 закреплены крышки 27. Для перемещения золоТни- ка 25 на штоке пневмоцилиндра установлен кронштейн 28.
Кроме .того, на плите 10 установлены втулки 29, а на плите И - направляющие 30, необходимые для обеспечения воспроизводимости взаимного расположения мишенного узла 1 и привода при повторньтх установках мишенного узла на место эксплуатации. Плита 10 снабжена также приспособлением 31 для дистанционного захва- та а мишенное устройство установлено и закреплено на подставке 32.
Расстояние между осями штока 6 и колеса 12 выбрано из вьфажения
1 R cosci
f sino6- -|5,
5 0 5
0
где
R - расстояние между центром
колеса и концом пальца; h, ширийа пальца колеса; h - ширина собачки; oi - угол между ближайшими пальцами.
В примере конкретного выполнения R 100 мм, h, 10 мм, h 8 мм,
.-,
Мишенное ycTpofiCTgo работает следующим образом.
При необходимости перемещения мишени сжатый воздух подается в соответствующий пневмоцилнндр 5 и на вход, соответствующего пневмораспре- делителя 9. При этом поршень пневмоцилиндра 5 начинает двигаться, сжимая пружину возврата и выдвигая шток 6. В.процессе движения штока собачка 7 входит во взаимодействие с
20
3 14507
пальцем 13, при этом собачка 7 поворачивается, сжимая пружину 8 до тех пор, пока не пройдет под пальцем 13. После этого .под действием пружины 8 собачка 7 возвращается в исходное состояние.
При выдвижении штока 6 кронштейн 28 входит во взаимодействие с кронштейном 26 и перемещает золотник ю 25 до тех пор, пока выход пневморас- пределителя 9 не соединится с отвер- стием атмосфера, а вход не перекроется. Такое состояние пневморас- пр еделителя 9 соответствует сигналу 5 1, который поступает в систему автоматического управления мишенным устройством, ;По ЭТОМУ сигналу страв- ливается сжатый воздух из пневмо- цилиндра 5 и поршень этого пневмо- цилиндра под действием пружины возврата начинает совершать обратный ход. При этом собачка 7 снова входит во взаимодействие с пальцем 13, но .так как теперь она еще и упира- 25 ется в в ыступ на штоке 6 и,следовательно i не может повернуться, то поворачивается колесо 12 до тех пор, пока собачка 7 не выйдет из взаимодействия с пальцем 13, т.е. на зо угол. 1Г/6, при этом колесо стопорится при помощи фиксатора 20. Вращательное движение колеса 12 посредством зубчатой передачи переходит во вращательное движение винта 16 и сортветственно в поступательное движение гайки 17 вместе с жестко свя- занной с ней платформой 18. Через стойки 19, связывающие платформу 18 с блоком 2 мишеней, поступательное движение платформы 18 обеспечивает поступательное движение мишеней 3. При совершении поршнем, пневмоцилинд- ра 5 обратного Х()да кронштейн 28 вхо- дит во взаимодействие с эторым кронштейном 26 и перемещает золотник 25 в обратную сторону, В результате-выход и вход пневмораспределителя 9 оказываются соединенными. Такое состояние пневмораспределителя 9 соот- ветствует сигналу О, поступающему в систе -1у автоматического управления ишенньм устройством. По этому сиг- налу количество ходов штока, подсчитываемое сумматором, увеличивается а единицу В случае, если количество ходов штока в сумматоре совпадает с запрограммированным, система управления отключает подачу сжатого
35
45
50
55
20
07
ю 5 25 зо
35
45
0
5
.18
воздуха к пневмоцилиидру 5 и пневмо- распределнтелю 9, если же нет, то процесс работы повторяется. О положении каждой нз четырех мишеней су
дят по показанию сумматора.
При необходимости установить или эвакуировать мишенный узел 1 с места эксплуатации система управления мишенным устройством отключается (при этом D1TOK 6 находится в крайнем положении, при котором он полностью выведен из зоны взаимодействия
:с пальцами 13 колеса 12), исполнительный механизм системы эвакуации производит захват приспособления 31 и устанавливает (по направляющим 30),. или эвакуирует мишенный, узел 1. г ;
Ус-тройство позволяет осуществлять , дистанционную установку и эвакуацию мишенного узла при проведении регла- ментных работ и работ по замене вы- шедших из строя элементов мишенного ; узла за счет автономности мишенно- . го узла и привода механизма перемещения « При этом существенно сокращаются затраты на проведение регламент- ; ных и ремонтных работ.
Формула изобретения
Мишенное устройство, содержащее основание, установленный на нем . шенный узел, снабженный мexaнизмo s перемещения мишеней, кинематггчески ; ;вязанньгм с приводом, о т л и ч а - ю щ е е с я тем, что, с целью повы-; шення эффективности за счет обеспе- - чения йозможности дистанционной уС тановки и эвакуацни шшeкнoгo узла, основание выполнено в виде двух ; плит, на первой из которых установле- ны привод механизма перемещения в виде пневмодиликдр а и узел контроля перемещения ишeнeй, выполненый в виде пневмораспределителя, а -на второй плите установлен .мишенный узел, ; при этом кинематическая связь привода, d механизмом перемещения выполнена ,. в виде, штока пневмоцнлиндра,. снаб«о-.; . женного собачкой, закрепленной на . . его конце, и установленного с возможностью перемещения параллельно ос- нованию, и колеса, установленного. на второй плите так, что ось его вра- щения перпендикулярна основанию, и снабженного фиксатором и радиально .расположенными пальцами, равномерно . установленными по окружности с воз-
51450718
можностью взаимодействия с собачкой,где R причем расстояние I между осью
штока и центром колеса выбрано изh,
соотношения5
t t
1 - R cosoi + - sinot + -|-J
9иг.2
расстояние между центром колеса и концом ,(м)4 ширина пальца колеса, (м); ширина собачки, (м); угол между, ближайшими пальцами, (рад)..
Яиг.Д
гв
26
24
Фиг.4
В-в побеонито
Вымд
Г-Г
ч
ВходАтмосфера
Фив.5
