пневмоцилиндром. Таким образом, про- юнии электромагнита схвата деталь паисходит дополнительная ориентациядает в тару, а робот 5 возвращает
детали 9- относительно схвата 26,схват в первоначальное положение дпя
что позволяет трчно позиционироватьповторения цикла работы. деталь относительно схвата, а в даль-Работа поворотных столов зависит
I нейшем обеспечить точную укладку де- количества циклов работы робота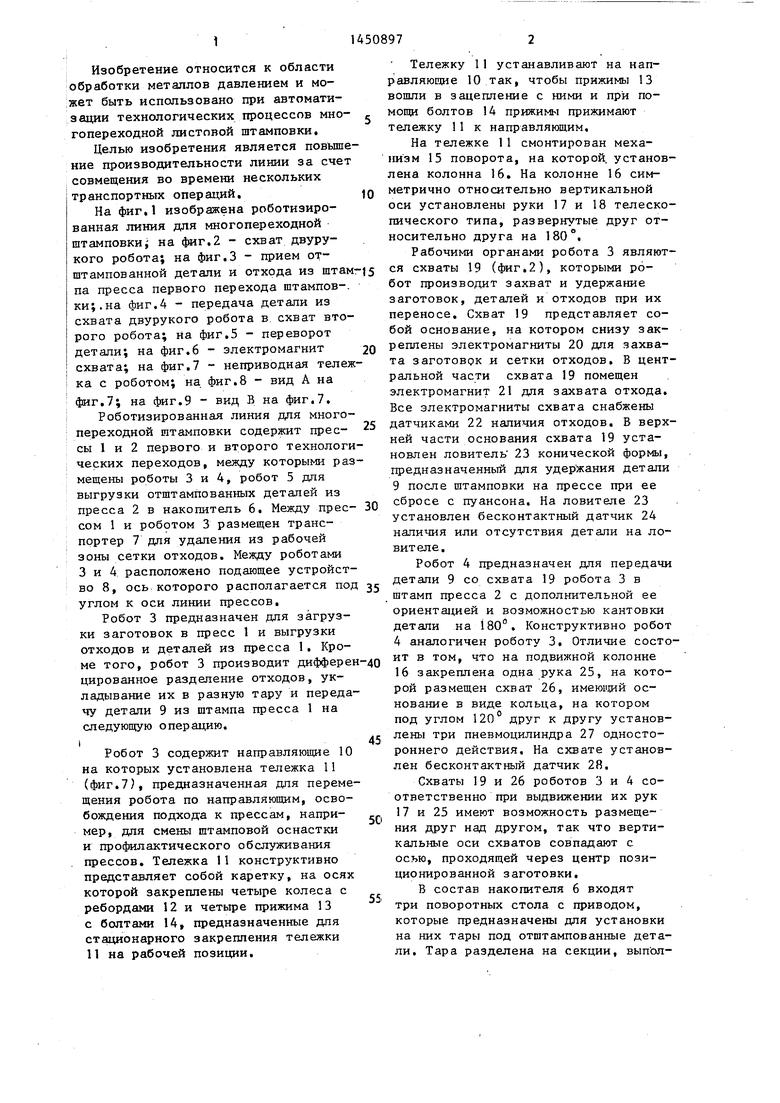
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Автоматизированный комплекс для многопереходной штамповки | 1982 |
|
SU1013042A1 |
| Автоматизированный комплекс для многопереходной штамповки | 1986 |
|
SU1461566A2 |
| Роботизированный комплекс для многопереходной штамповки | 1983 |
|
SU1199368A1 |
| Автоматизированный комплекс для штамповки листовых заготовок | 1982 |
|
SU1061896A1 |
| Автоматическая линия | 1982 |
|
SU1043036A1 |
| Автоматизированный комплекс для многопереходной штамповки | 1982 |
|
SU1163943A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Автоматизированная линия для многопереходной листовой штамповки | 1988 |
|
SU1516198A1 |
| Линия для многопереходной штамповки деталей из листового материала | 1987 |
|
SU1433587A1 |


Изобретение относится к обработке металлов давлением и может быть использовано при автоматизации технологических процессов многопереходной листовой штамповки. Цель изобретения - повьппение производительности за счет совмещения во времени нескольких транспортных операций. В лирши прессы расположены фронтами параллельно и напротив друг друга. Механизм 32 подъема заготовок опускается и захватывает заготовку. После подъема заготовки стол 30 перемещается под нее, заготовка падает на стол 30. Стол 30 перемещается в обратном направлении, и заготовка базируется между упорами 31 и 37, а затем захватывается схватом робота 3 и переносится в пресс 1. Робот 3 второй рукой удаляет из пресса отходы, которые сбрасываются на .транспортер 7. Деталь расположенная в схвате над сбазированной заготовкой, захватывается схватом робота 4 и переносится в пресс 2. 4 з.п. ф-лы, 9 ил. сл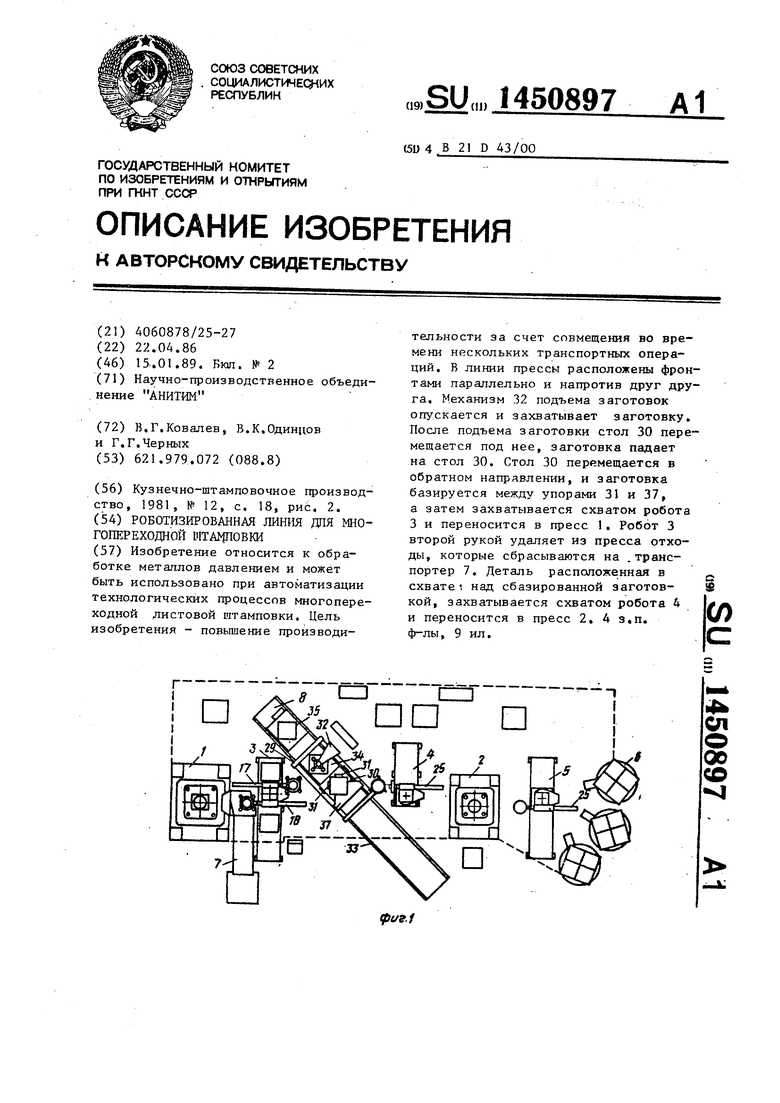
I тали в штамп второго технологическое
i то перехода.
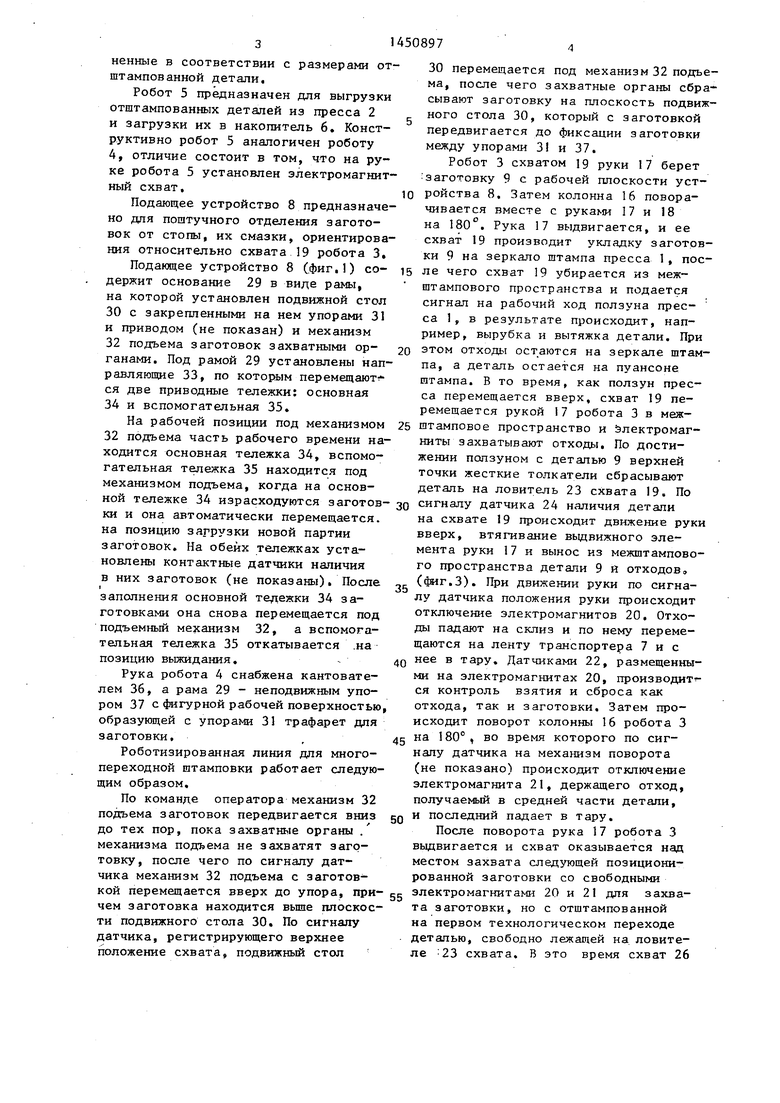
I Движением вверх схват 26 снимает
I деталь 9 с ловителя 23 рхвата 19
iробота 3, после чего последний гоi тов к повторению цикла,
I Аналогичные.операции выполняет
i вторая рука 18 робота 3 со смещениI ем фазы выполнения операций относи30
35
: тельно работы первой руки на полови- 25 операций по переходам позволяет знаI ну цикла, т.е. когда одна рука выI полняет операции по захвату загоI товки и передаче детали на схват 26 робота 4, другая рука выполняет операции по укладке заготовки на зеркало штампа пресса 1, удалению детали и отходов из межштампового прост; ранства и наоборот.
Сняв деталь с руки робота 3, робот 4 втягиванием руки и поворотом колонны 16 переносит ее к прессу 2. При необходимости возможен поворот схвата 26 вокруг его горизонтальной оси на 180°с помощью кантователя 36, установленного на руке 25 робота 4. После поворота колонны робота 4 схват 26 с деталью заводится в мезк птамповое пространство и деталь -сбрасывается в штамп пресса 2. Затем робот 4 убирает схват 26 из штампо- вого пространства, после чего пресс 2 совершает одиночный рабочий ход, а робот 4 поворотом колонны 16, двичительно повысить производительность. Формула изобретения
45
Изобретение за счет совмещения
0
5
чительно повысить производительность. Формула изобретения
o параллельно и напротив друг дру- га, подающее устройство установлено между прессами и выполнено в виде рамы, установленного на раме с воз- можностью возвратно-поступательного gперемещения в горизонтальной плос- кости под углом к фронту каждого пресса приводного стола с упорами для заготовки, установленного на ра- ме неподвижного упора с фигурной рафиг. г
;s
Фиг. 3
фиг. ij.
Фи.5
Фиг.6
28
в ид А
Фиг. 8
ю
в
В ид В
Фиг. 9
| Кузнечно-штамповочное производство, 1981, № 12, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
