11
Изобретение относится к машино- . строению, а именно к сборочному или сборочно-сварочному производству.
Цель изобретения расширение тех нологических возможностей - обеспе- чивается возможностью разжима изделия не только в позициях смены изделий, но и в любой рабочей позиции, что позволяет выполнять операции на линии как с закрепленным, так и с незакрепленным изделием.
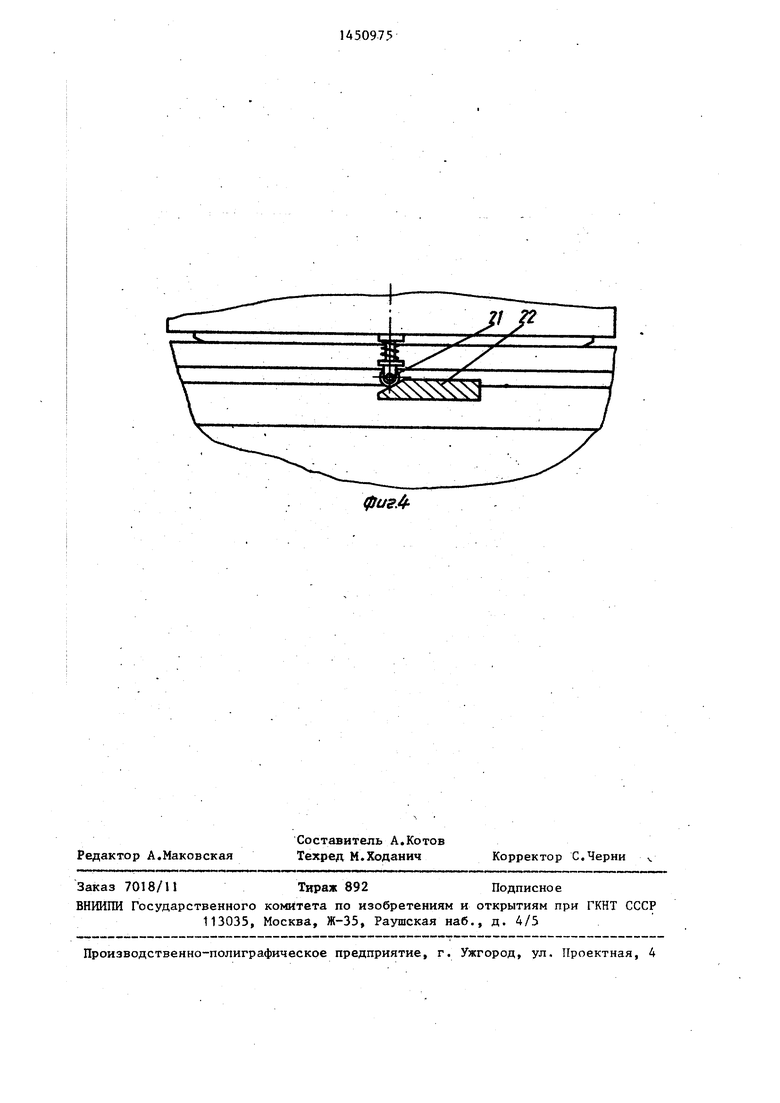
На фиг,1 изображена схема линии с несинхронным ритмом работы} на . фиг.2 - то же, поперечный разрез; на фиг.З - спутник, разрез; на фиг.4 --механизм управления обратным клапаном.
Линия с несинхронным ритмом работ содержит транспортер 1 со спутниками 2, связывающими установленное в технологической последовательности технологическое оборудование 3-6; устройства для фиксации спутников на рабочих позициях 7, состоящие из сило- вого цилиндра 8, выполненного с возможностью подъема спутников 2, и огрничителей 9 подъема спутников 2.
Спутники имеют базирующие приспоч
Линия с несинхронным ритмом работы -работает следующим образом.
На загрузочной позиции изделие 11 устанавливают на стол 10 спутника 2, который по транспортеру подается на рабочую позицию, где останавливается и фиксируется, при этом силово цилиндр 8 вступает в контакт со спутником 2, приподнимая его над транс-v портером 1. Стол 10 упирается в ограничители 9 и при дальнейшем движении спутника 2 вверх рабочая жидкость вытесняется из поршневой полости 15 г гдцроцилиндра 12 и через управляемый обратньм клапан 16 поступает в жид костную камеру 19 предварительно заряженного пневмогидроаккумулятора 20 и в щтоковые полости 17 гидроцилиндров 18 одностороннего действия - происходит закрепление изделия 1I на столе 10 зажимами 23, размещенными на штоках гидроцилиндров 12, При этом прекращается движение спутника 2.
После выполнения необходимых технологических операций силовой цилиндр 8 возвращается в исходное положение. Спутник 2 также опускается на транспортер 1, однако изделие 11 продолжа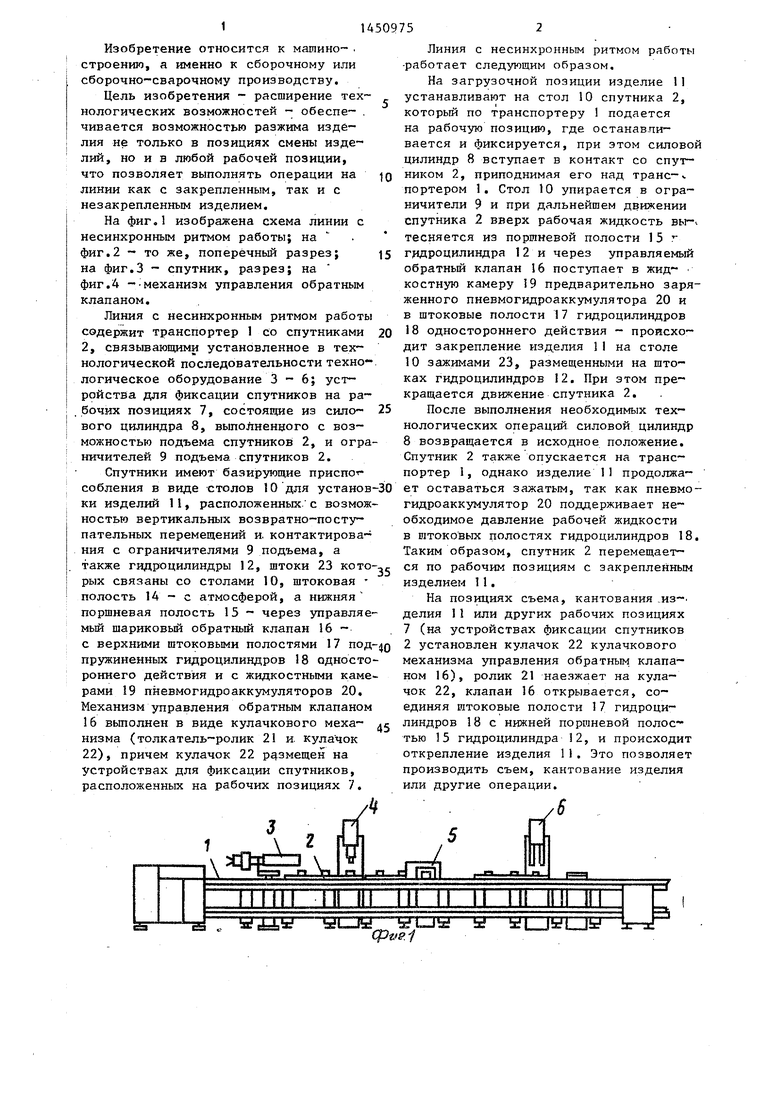
| название | год | авторы | номер документа |
|---|---|---|---|
| Холодновысадочный автомат | 1978 |
|
SU763031A1 |
| Гидравлическая система скрепера | 1972 |
|
SU610948A1 |
| Устройство для управления гидроприводом ножницеобразного режущего аппарата плуга | 1987 |
|
SU1510731A1 |
| Судовое устройство для спуска и подъема объектов на волнении | 1975 |
|
SU596497A1 |
| Гидравлический пресс | 1977 |
|
SU737242A1 |
| Холодновысадочный автомат | 1982 |
|
SU1346320A1 |
| Гидропривод погрузчика | 1981 |
|
SU992420A1 |
| Холодновысадочный автомат | 1984 |
|
SU1219217A1 |
| Стенд для испытаний качающихся гидроцилиндров | 1981 |
|
SU989187A1 |
| Рычажный кантователь | 1985 |
|
SU1323311A1 |
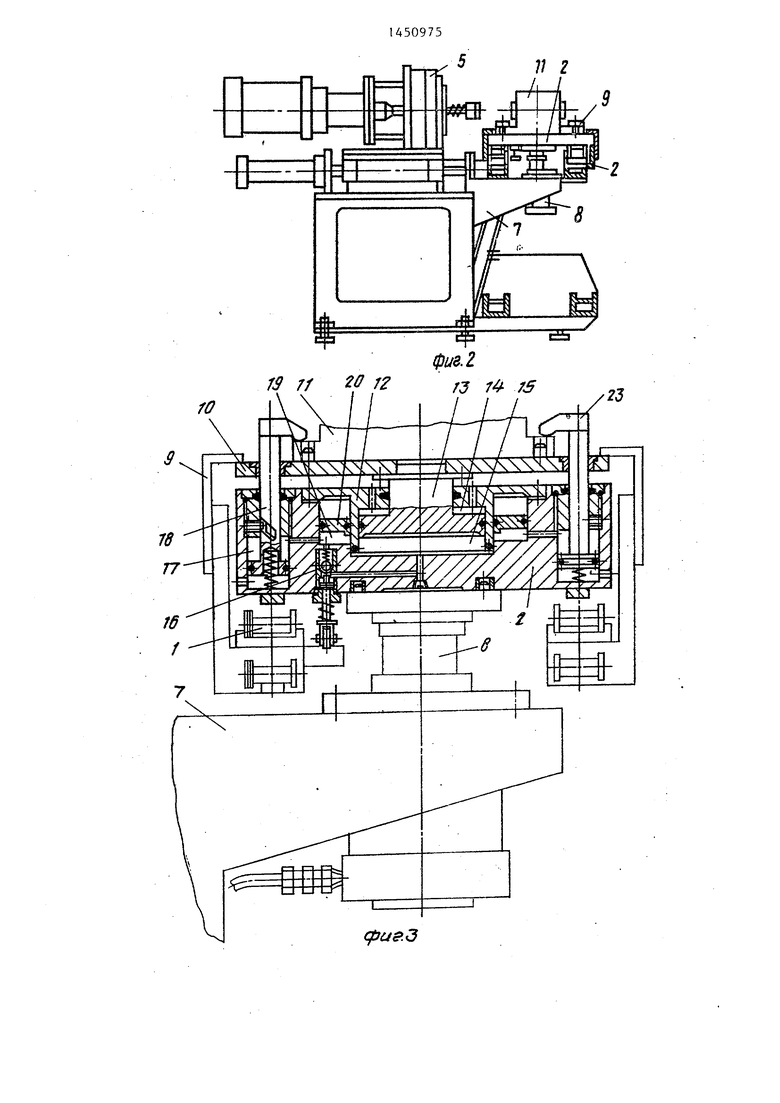
собления в виде столов 10 для установ-30 ет оставаться зажатым, так как пневмоки изделий 11, расположенных с возможностью вертикальных возвратно-поступательных перемещений и. контактирования с ограничителями 9 подъема, а
также гидроцилиндры 12, штоки 23 кото- ся по рабочим позициям с закрепленным рык связаны со столами 10, штоковая изделием И.
полость 1А - с атмосферой, а нижняя На позициях съема, кантования .из, поршневая полость 15 - через управляе- делия 1 или других рабочих позициях мьй шариковьш обратный клапан 16 - .7 (на устройствах фиксации спутников с верхними штоковьми полостями 17 2 установлен кулачок 22 кулачкового пружиненньпс гидроцилиндров 18 односто- механизма управления обратным клапа- роннего действия и с жидкостными камерами 19 пневмогидроаккумуляторов 20. Механизм управления обратным клапаном
гидроаккумулятор 20 поддерживает необходимое давление рабочей жидкости в штоковых полостях гидроцилиндров 18 Таким образом, спутник 2 перемещаетном 16), ролик 21 наезжает на кулачок 22, клапан 16 открывается, соединяя щтоковые полости 17 гидроци16 вьтолнен в виде кулачкового меха- , линдров 18 с нижней поршневой полос- низма (толкатель-ролик 2 и. кулачок 22), причем кулачок 22 размещен на устройствах для фиксации спутников, расположенных на рабочих позициях 7.
тью 15 гидроцилиндра 12, и происходи открепление изделия 11. Это позволяе производить съем, кантование изделия или другие операции,
гидроаккумулятор 20 поддерживает необходимое давление рабочей жидкости в штоковых полостях гидроцилиндров 18, Таким образом, спутник 2 перемещает На позициях съема, кантования .изделия 1 или других рабочих позициях 7 (на устройствах фиксации спутников 2 установлен кулачок 22 кулачкового механизма управления обратным клапа-
ном 16), ролик 21 наезжает на кулачок 22, клапан 16 открывается, соединяя щтоковые полости 17 гидроцилиндров 18 с нижней поршневой полос-
тью 15 гидроцилиндра 12, и происходит открепление изделия 11. Это позволяет производить съем, кантование изделия или другие операции,
/S
13 7f 0 Г2
ГО
фиг. 2
/J 74 Г5
/
2Ъ
.З
фиг,
| Вороничев Н.Н | |||
| и др | |||
| Автоматические линии из агрегатных станков | |||
| М., 1979, с.141-144, 158-159, рис | |||
| рис | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
