Фиг.З
Изобретение относится к машиностроению и может быть использовано в роботизированных автоматических линиях и станках, обрабатывающих детали типа тел вращения.
Цель изобретения - расширение технологических возможностей.
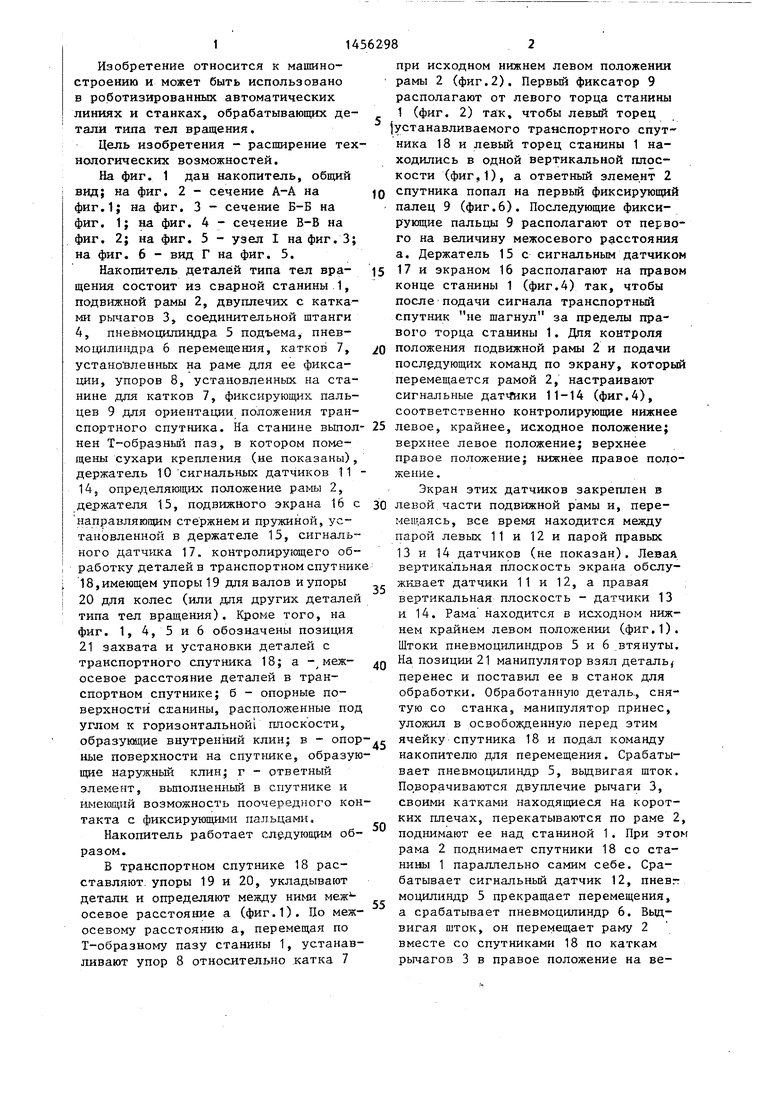
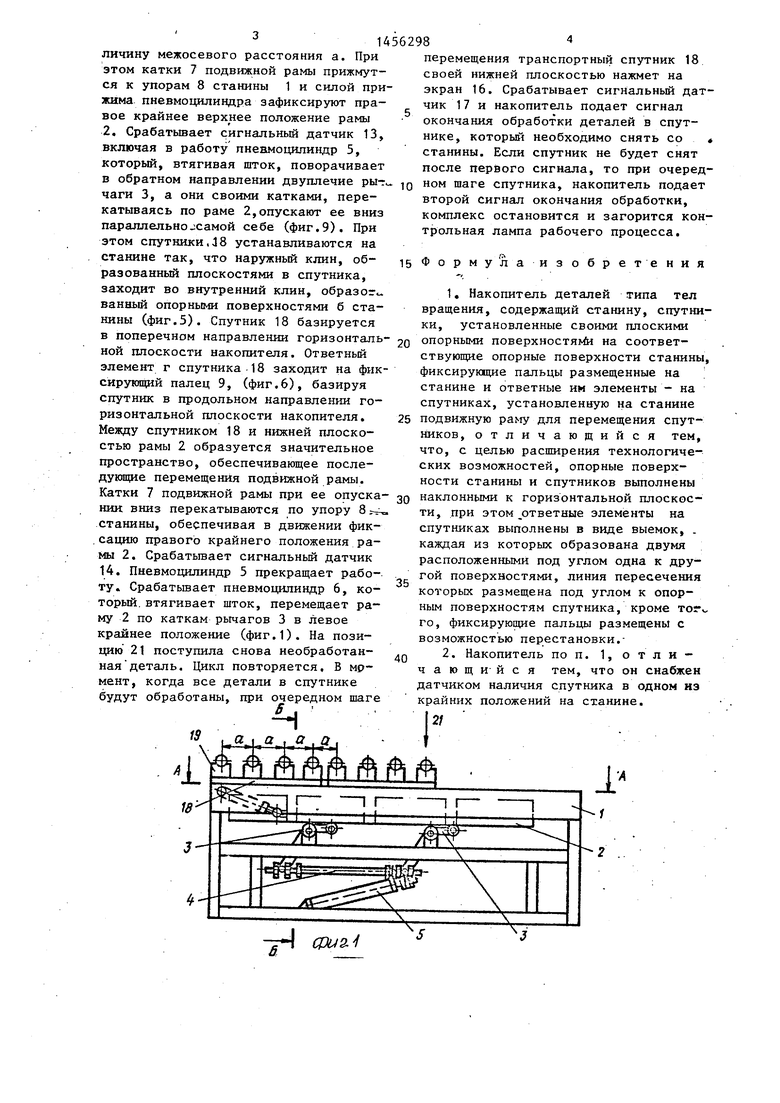
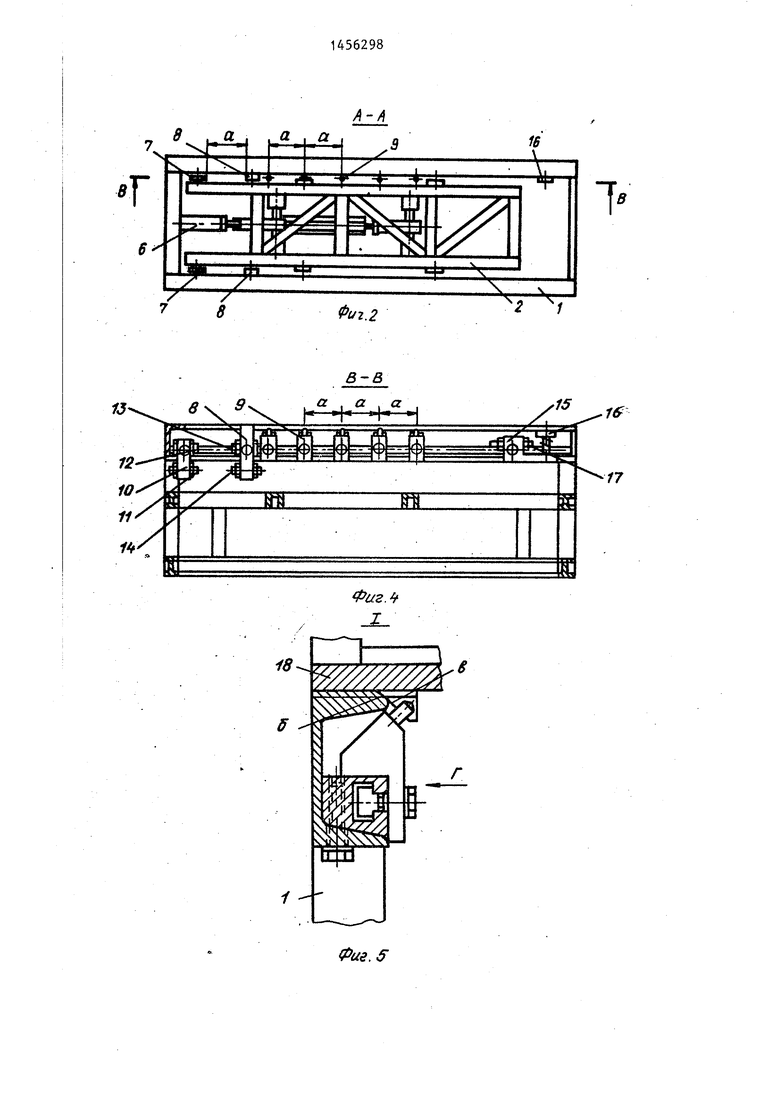
На фиг. 1 дан накопитель, общий вид; на фиг. 2 - сечение А-А на фиг.1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 2; на фиг. 5 - узел I на фиг. 3; на фиг. 6 - вид Г на фиг. 5.
Накопитель деталей типа тел вращения состоит из сварной станины 1, подвижной рамы 2, двуплечих с катками рычагов 3, соединительной штанги 4, пневмоцилиндра 5 подъема, пнев- моциливдра 6 перемещения, катков 7, устано вленных на раме для ее фиксации, упоров 8, установленных на станине для катков 7, фиксирующих пальцев 9 для ориентации положения транспортного спутника. На станине вьшол- нен Т-образный паз, в котором помещены сухари крепления (не показаны), держатель 10 сигнальных датчиков 11 14, определяющих положение рамы 2, держателя 15, подвижного экрана 16 с направляющим стержнем и пружиной, установленной в держателе 15, сигнального датч1-ша 17. контролирующего обработку деталей в транспортном спутник 18,имеющем упоры 19 для валов и упоры
20для колес (или для других деталей типа тел вращения). Кроме того, на фиг. 1, 4, 5 и 6 обозначены позиция
21захвата и установки деталей с транспортного спутника 18; а - межосевое расстояние деталей в транспортном спутнике; б - опорные поверхности сханины, расположенные под углом к горизонтальной плоскости, образующие внутренний клин; в - опорные поверхности на спутнике, образующие наружньш клин; г - ответный элемент, вьшолненный в спутнике и имеющий возможность поочередного контакта с фиксирующими пальцами.
Накопитель работает следующим образом.
В транспортном спутнике 18 расставляют, упоры 19 и 20, укладывают детали и определяют между ними осевое расстояние а (фиг.1). Но межосевому расстоянию а, перемещая по Т-образному пазу станины 1, устанавливают упор 8 относительно катка 7
„
- е
10
15
20
25
30
35
40
45
50
55
при исходном нижнем левом положении рамы 2 (фиг.2). Первьй фиксатор 9 располагают от левого торца станины 1 (фиг. 2) так, чтобы левый торец устанавливаемого транспортного спутника 18 и левый торец сханины 1 находились в одной вертикальной плоскости (фиг,1), а ответный элемент 2 спутника попал на первый фиксирующий палец 9 (фиг.6). Последующие фиксирующие пальцы 9 располагают от первого на величину межосевого расстояния а. Держатель 15 с сигнальным датчиком 17 и экраном 16 располагают на правом конце станины 1 (фиг.4) так, чтобы после подачи сигнала транспортный спутник не шагнул за пределы правого торца станины 1. Для контроля положения подвижной рамы 2 и подачи последующих команд по экрану, который перемещается рамой 2, настраивают сигнальные датгшки 11-14 (фиг.4), соответственно контролирующие нижнее левое, крайнее, исходное положение; верхнее левое положение; верхнее правое положение; нижнее правое положение.
Экран этих датчиков закреплен в левой части подвижной рамы и, перемещаясь, все время находится между парой левых 11 и 12 и парой правых 13 и 14 датчиков (не показан). Левай вертикальная плоскость экрана обслуживает датчики 11 и 12, а правая ; вертикальная плоскость - датчики 13 и 14. Рама находится в исходном нижнем крайнем левом положении (фиг.1). Штоки пневмоцилиндров 5 и 6 .втянуты. На позиции 21 манипулятор взял деталь перенес и поставил ее в станок для обработки. Обработанную деталь., снятую со станка, манипулятор принес, уложил в освобожденную перед этим ячейку-спутника 18 и подал команду накопителю для перемещения. Срабатывает пневмоцилиндр 5, выдвигая шток. По.ворачиваются двуплечие рычаги 3, своими катками находящиеся на коротких плечах, перекатываются по раме 2, поднимают ее над станиной 1. При этом рама 2 поднимает спутники 18 со станины 1 параллельно самим себе. Срабатывает сигнальный датчик 12, пневг моцилиндр 5 прекращает перемещения, а срабатывает пневмоцилиндр 6. Вьщ- вигая шток, он перемещает раму 2 вместе со спутниками 18 по каткам рычагов 3 в правое положение на ве10
личину межосевого расстояния а. При этом катки 7 подвижной рамы прижмутся к упорам 8 станины 1 и силой прижима пневмоцилиндра зафиксируют правое крайнее верхнее положение рамы 2. Срабатьтает сигнальный датчик 13, включая в работу пненмоцилиндр 5, который, втягивая шток, поворачивает в обратном направлении двуплечие ры-. чаги 3, а они своими катками, перекатываясь по раме 2,опускают ее вниз параллельноJcaмoй себе (фиг.9). При этом спутники,J8 устанавливаются на станине так, что наружный клин, образованный плоскостями в спутника, заходит во внутренний клин, образогс. ванный опорными поверхностями б станины (фиг.5). Спутник 18 базируется в поперечном направлении горизонталь- 2п ной плоскости накопителя. Ответньй элемент г спутника. 18 заходит на фиксирующий палец 9, (фиг.6), базируя спутник в продольном направлении горизонтальной плоскости накопителя. Между спутником 18 и нижней плоскостью рамы 2 образуется значительное пространство, обеспечивающее послеующие перемещения подвижной рамы. Катки 7 подвижной рамы при ее опускании вниз перекатываются по упору 8 ;,„ станины, обеспечивая в движении фик- сацию правого крайнего положения раы 2. Срабатьгаает сигнальный датчик 14. Пневмоцилиндр 5 прекращает рабоу.. Срабатьшает пневмоцилиндр 6, коорый, втягивает шток, перемещает рау 2 по каткам рычагов 3 в левое райнее положение (фиг.1). На позицию 21 поступила снова необработанная деталь. Цикл повторяется. В мр- ент, когда все детали в спутнике будут обработаны, при очередном шаге
. . а .а
1
25
30
35
40
15
перемещения транспортный спутник 18 своей нижней плоскостью нажмет на экран 16. Срабатывает сигнальный датчик 1 7 и накопитель подает сигнал окончания обработки деталей в спутнике, который необходимо снять со станины. Если спутник не будет снят после первого сигнала, то при очередном шаге спутника, накопитель подает второй сигнал окончания обработки, комплекс остановится и загорится контрольная лампа рабочего процесса.
Ф о р м
.
У л
изобретения
п
5
0
5
0
1. Накопитель деталей типа тел вращения, содержащий станину, спутники, установленные своими плоскими опорными поверхностя й1 на соответствующие опорные поверхности станины, фиксирующие пальцы размещенные на станине и ответные им элементы - на спутниках, установленную на станине подвижную раму для перемещения спутников, отличающийся тем, что, с целью расширения технологических возможностей, опорные поверхности станины и спутников выполнены наклонными к горизонтальной плоскости, при этом ответные элементы на спутниках выполнены в виде выемок, . каждая из которых образована двумя расположенными под углом одна к другой поверхностями, линия пересечения которых размещена под углом к опорным поверхностям спутника, кроме тог, го, фиксирующие пальцы размещены с возможностью перестановки.2. Накопитель по п. 1, отличающийся тем, что он снабжен датчиком наличия спутника в одном из крайних положений на станине.
2/
Фиг 2
16
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сборки корпуса валка сушильно-гладильного катка | 1982 |
|
SU1077749A1 |
| МЕТАЛЛОРЕЖУЩИЙ ОБРАБАТЫВАЮЩИЙ ЦЕНТР С ЗАГРУЗОЧНЫМ УСТРОЙСТВОМ | 2004 |
|
RU2257287C1 |
| ПЕРЕКОМПОНУЕМАЯ АВТОМАТИЧЕСКАЯ ЛИНИЯ | 1995 |
|
RU2080976C1 |
| Транспортная система | 1988 |
|
SU1567359A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ МНОГОСТОРОННЕЙ ОБРАБОТКИ | 1995 |
|
RU2082585C1 |
| Гибкая производственная система | 1989 |
|
SU1672704A1 |
| Полуавтоматическая сборочная линия | 1982 |
|
SU1115886A1 |
| КОМПЛЕКС СБОРКИ ШАТУННО-ПОРШНЕВОЙ ГРУППЫ | 2013 |
|
RU2548843C2 |
| ПОЛУАВТОМАТИЧЕСКАЯ ЛИНИЯ СБОРКИ КАРДАННЫХ ВАЛОВвс?^со;озн^.ПАШи1и-Г..л;';Г'''Б^^БЛИО: ^.•'-' | 1973 |
|
SU366054A1 |
| Автомат для контроля и сортировки гнезд штепсельных разъемов | 1986 |
|
SU1342537A1 |
Изобретение относится к машиностроению и может быть использовано в роботизированных автоматических линиях и станках для обработки деталей (типа тел вращения. Целью изобретения является расширение технологических возможностей. Рама 2 поднимает спутник 18 над станиной 1. Совершая продольное перемещение относительно станины и затем опускаясь вниз, переносит спутник на шаг, равный расстоянию между осями опор 19 или 20. лу Спутник базируется на станине в поперечном направлении за счет плоских опорных поверхностей, выполненных на станине и на спутнике, наклонных к горизонтальной плоскости. В продольном направлении спутник базируется за счет взаимодействия выемки, выполненной на нем, и фиксирующих паль- дев 9, расстояние между которыми равно шагу перемещения спутника. При изменении шага перемещения расстояние между фиксирующими пальцами можно изменять. 1 з.п. ф-лы, 6 ил. ч ш (Л
1fy
1 Фие.
ФигЛ
в
Вид г
Физ.б
| Горизонтально-замкнутый шагающий конвейер автоматической линии | 1985 |
|
SU1283186A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
