(21)4273566/31-08
(22)01.07.86
(46) 15.02.89. Бюп. № 6
(71)Киевский политехнический инсти- тут им. 50-летия Великой Октябрьской
социалистической революции
(72)Ю.В.Петраков и В.К.Фролов
(53)621.924.1 (088.8)
(56)Авторское свидетельство СССР № 1230802, В 23 В 19/12, 1984.
(54)УСТРОЙСТВО ЗАДАЮЩЕЙ ПОДАЧИ КОПИ- РОВАЛЬНО-ШЛИФОВАЛЬНОГО СТАНКА
(57)Изобретение относится к станкостроению и может быть использовано в качестве привода вращения детали, в копировально-пшифовальных станках для обработки восстановленных наплавкой кулачков распределительных валов двигателей внутреннего сгорания и других аналогичных деталей. Целью изобретения является упрощение конструкции устройства и уменьшение его габаритов. Устройство содержит копировальный суппорт с установленным на нем поворотным дросселем управления скоростью вращения шпинделя управляющий кулачком, механизм колебательного движения шпинделя, устройство уп- равления скоростью колебаний, электрогидравлический распределитель режима обработки, включенный в сливную магистраль гидродвигателя, а также датчики положения управляющего кулачка, стола и копиров. Механизм колебательного движения шпинделя вьтол- нен в виде электрогидравлического распределителя реверса и связанного с ним датчика положения копировального суппорта, а устройство управления скоростью колебательного движения выполнено в виде установленного неподвижно на столе станка поворотного гидравлического дросселя, ось поворота которого связана кинематически с копировальным суппором, при этом электрогидравлический распределитель реверса включен в сливную и нагнетательную магистрали гидродвигателя и установлен на столе станка, а распределитель .режима обработки вьшолнен трехпозиционным и подключен к поворотному дросселю управления скоростью вращения шпинделя и поворотному дросселю управления скоростью колебательного движения. 4 ил.
(О
(Л
СП
00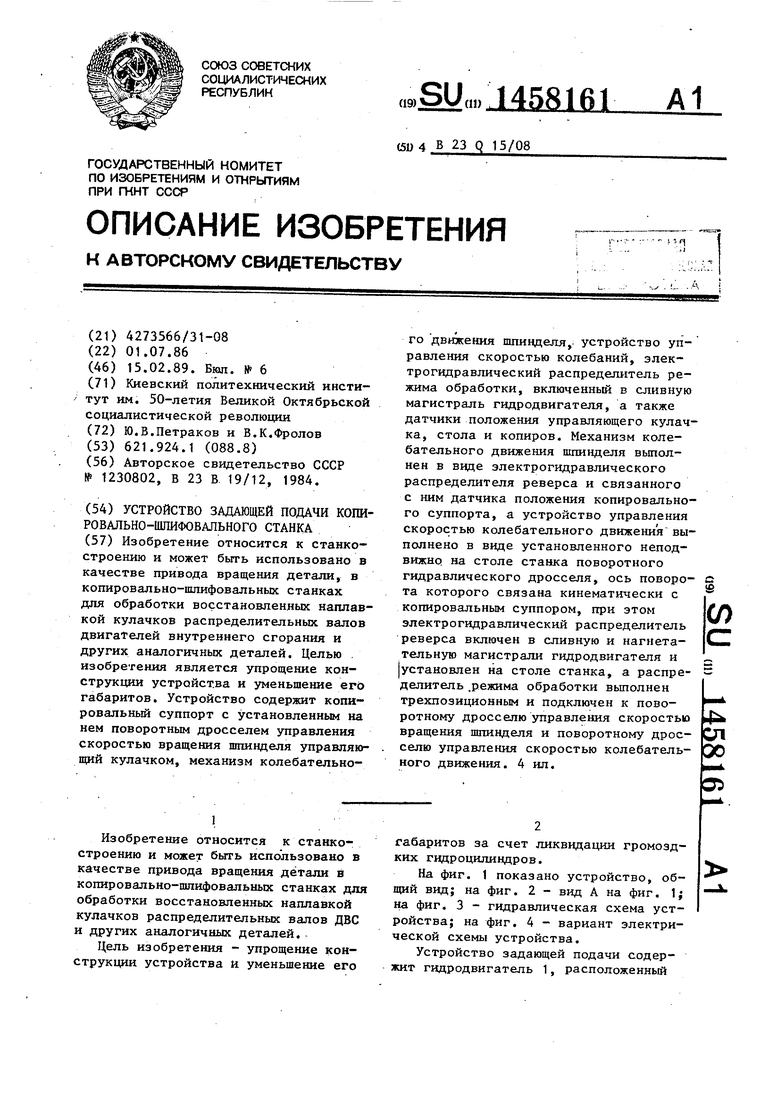
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод вращения устройства для шлифования восстановленных кулачков распределительного вала | 1984 |
|
SU1230802A1 |
| Привод вращения копирного шпинделя станка | 1982 |
|
SU1038178A1 |
| Устройство для шлифования восстановленных кулачков распределительного вала | 1984 |
|
SU1144856A1 |
| Система управления станком для шлифования кулачковых валов | 1984 |
|
SU1281389A1 |
| Гидравлический привод переменной задающей подачи | 1982 |
|
SU1007925A1 |
| Станок для обработки кулачкового вала | 1979 |
|
SU1042961A1 |
| Копировальный станок | 1975 |
|
SU751580A1 |
| Токарно-револьверный станок с устройством для двухкоординатного копирования | 1981 |
|
SU959929A1 |
| Станок для термообработки фасонных поверхностей с нагревом токами высокой частоты | 1983 |
|
SU1161569A1 |
| Привод вращения копирного шпинделя станка | 1990 |
|
SU1777575A3 |
1
Изобретение относится к станкостроению и может быть использовано в качестве привода вращения детали в копировально-пшифовальных станках для обработки восстановленных наплавкой кулачков распределительных валов ДВС и других аналогичных деталей.
Цель изобретения - упрощение конструкции устройства и уменьшение его
габаритов за счет ликвидации громоздких гидроцилиндров.
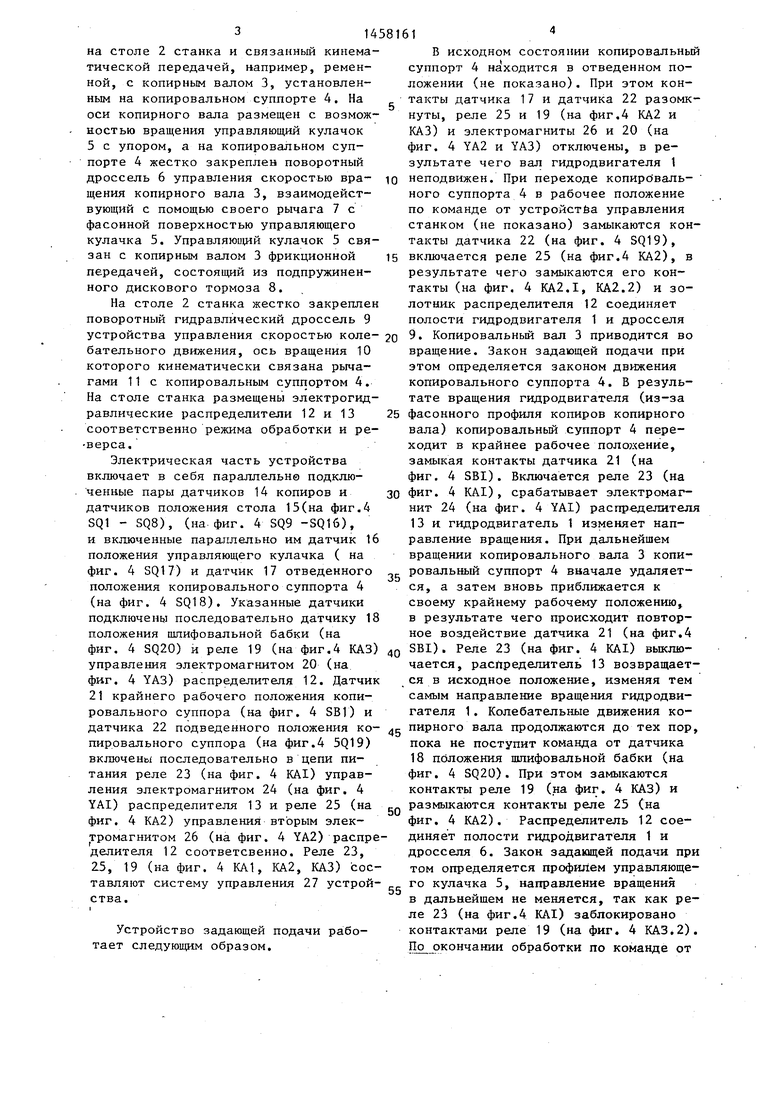
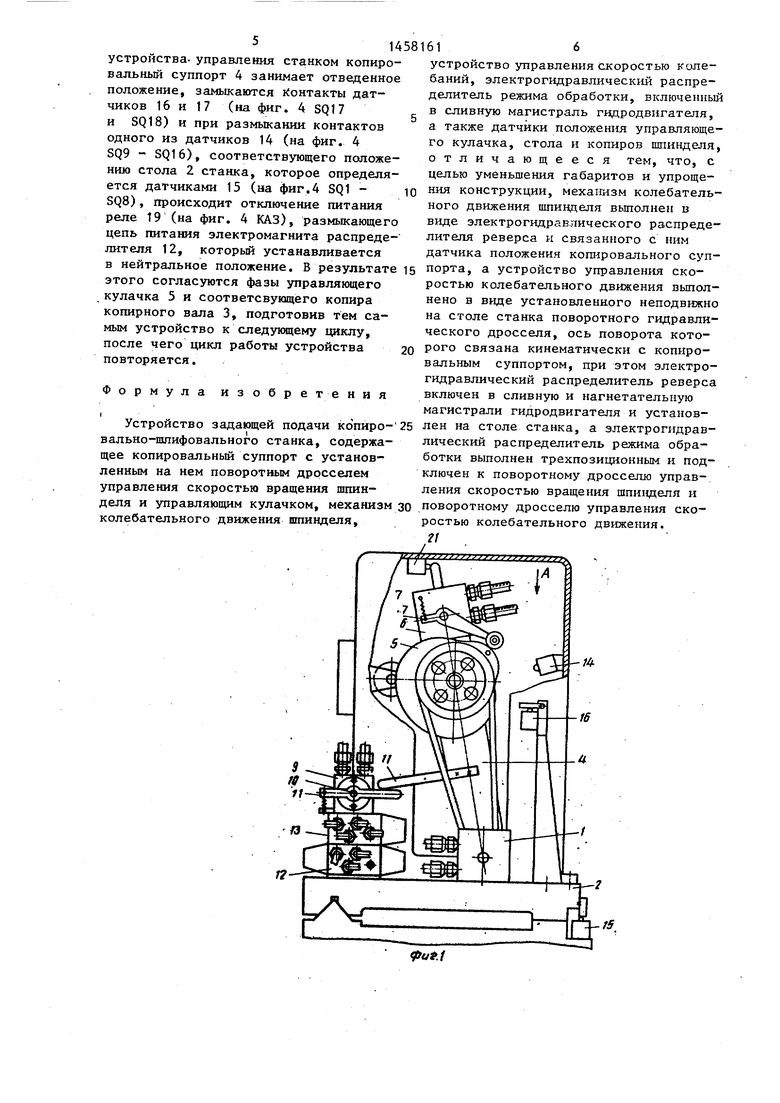
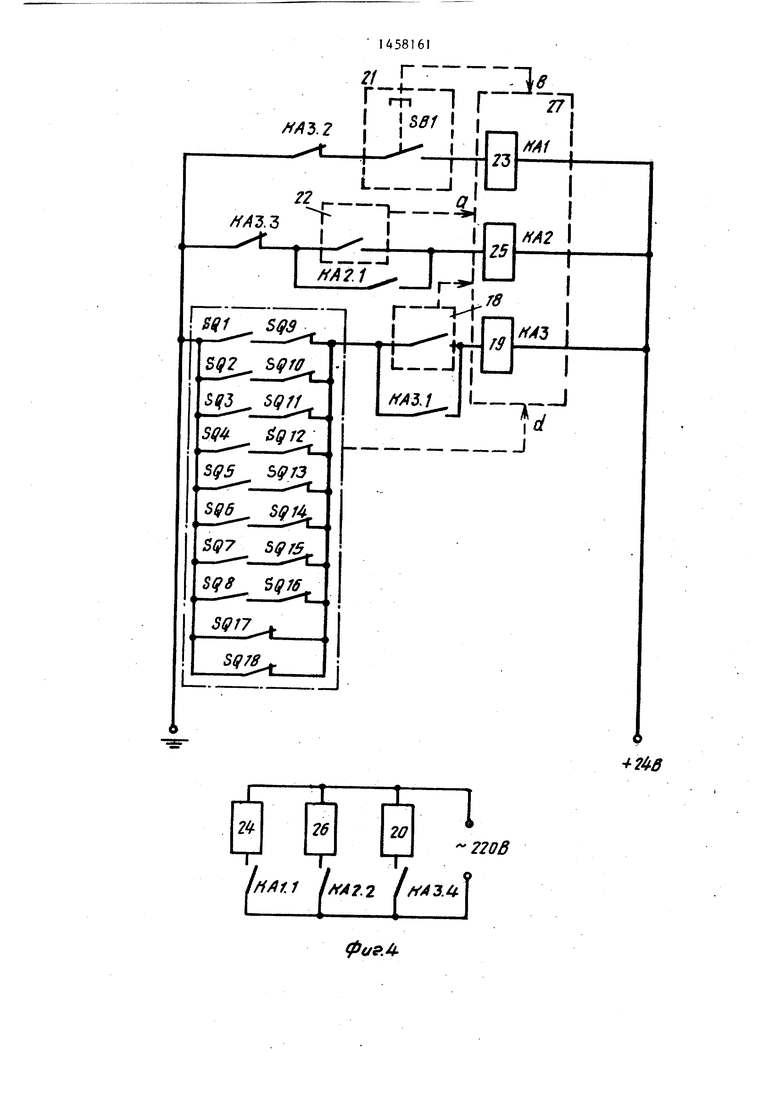
На фиг. 1 показано устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - гидравлическая схема устройства; на фиг. 4 - вариант электрической схемы устройства.
Устройство задающей подачи содержит гидродвигатель 1, расположенный
31458161
на столе 2 станка и связанный кинема- В исходном состоянии копировальный тической передачей, например, ремен- сунпорт 4 находится в отведенном поной, с копирным валом 3, установлен- ложении (не показано). При этом конным на копировальном суппорте 4. На такты датчика 17 и датчика 22 разомк- оси копирного вала размещен с возмож- нуты, реле 25 и 19 (на фиг.4 КА2 и ностью вращения управляющий кулачок КАЗ) и электромагниты 26 и 20 (на 5 с упором, а на копировальном суп- фиг. 4 YA2 и УАЗ) отключены, в репорте 4 жестко закреплен поворотный зультате чего вал гидродвигателя 1 дроссель 6 управления скоростью вра- ю неподвижен. При переходе копироваль- щения копирного вала 3, взаимодейст- ного суппорта 4 в рабочее положение вующий с помощью своего рычага 7 с по команде от устройства управления фасонной поверхностью управляющего станком (не показано) замыкаются кон- кулачка 5. Управляюищй кулачок 5 свя- такты датчика 22 (на фиг. 4 SQ19), зан с копирным валом 3 фрикционной 15 включается реле 25 (на фиг.4 КА2), в передачей, состоящий из подпружинен- результате чего замыкаются его конного дискового тормоза 8.такты (на фиг. 4 KA2.I, КА2.2) и зоНа столе 2 станка жестко закреплен лотник распределителя 12 соединяет поворотный гидравлический дроссель 9 полости гидродвигателя 1 и дросселя устройства управления скоростью коле- 20 9 Копировальньм вал 3 приводится во бательного движения, ось вращения 10 вращение. Закон задающей подачи при которого кинематически связана рыча- этом определяется законом движения гами 11 с копировальным суппортом 4. копировального суппорта 4. В резуль- На столе станка размещены электрогид- тате вращения гидродвигателя (из-за равлические распределители 12 и 13 25 фасонного профиля копиров копирного соответственно режима обработки и ре- вала) копировальный суппорт 4 пере- верса.ходит в крайнее рабочее положение.
Электрическая часть устройства замыкая контакты датчика 21 (на включает в себя параллельн© подклю- фиг. 4 SBI). Включается реле 23 (на ченные пары датчиков 14 копиров и зо Фиг. 4 KAI), срабатывает электромаг- датчиков положения стола 15(на фиг.4 нит 24 (на фиг. 4 YA1) распределителя SQ1 - SQ8), (на фиг. 4 SQ9 -SQ16), 13 к гидродвигатель 1 изменяет нап- и включенные параллельно им датчик 16 равление вращения. При дальнейшем положения управляющего кулачка (на вращении копировального вала 3 копи- фиг. 4 SQ17) и датчик 17 отведенного „j. ровальный суппорт 4 вначале удалиет- положения копировального суппорта 4 ся, а затем вновь приближается к (на фиг. 4 SQ18), Указанные датчики своему крайнему рабочему положению подключены последовательно датчику 18 в результате чего происходит повтор- положения шлифовальной бабки (на ное воздействие датчика 21 (на фиг.4 фиг. 4 SQ20) и реле 19 (на фиг.4 КАЗ) 40 SBI). Реле 23 (на фиг. 4 KAI) выклю- управления электромагнитом 20 (на чается, распределитель 13 возвращает- фиг. 4 УАЗ) распределителя 12. Датчик . ся в исходное положение, изменяя тем 21 крайнего рабочего положения копи- самым направление вращения гидродви- ровального суппора (на фиг. 4 SB1) и гателя 1. Колебательные движения ко- датчика 22 подведенного положения ко- с пирного вала продолжаются до тех пор, пировального суппора (на фиг.4 5Q19) пока не поступит команда от датчика включены последовательно в цепи пи- 18 положения шлифовальной бабки (на тания реле 23 (на фиг. 4 KAI) управ- фиг. 4 SQ20). При этом замыкаются ления электромагнитом 24 (на фиг. 4 контакты реле 19 (на фиг. 4 КАЗ) и УА1) распределителя 13 и реле 25 (на g размыкаются контакты реле 25 (на фиг. 4 КА2) управления вторым элек- фиг. 4 КА2). Распределитель 12 сое- тромагнитом 26 (на фиг. 4 УА2) распре- диняет полости гидродвигателя 1 и делителя 12 соответсвенно. Реле 23, дросселя 6. Закон задающей подачи при 25, 19 (на фиг. 4 КА1, КА2, КАЗ) сое- том определяется профилем управляюще- тавляют систему управления 27 устрой- го кулачка 5, направление вращения ства.в дальнейщем не меняется, так как реле 23 (на фиг.4 KAI) заблокировано
Устройство задающей подачи рабо- контактами реле 19 (на фиг. 4 КАЗ.2). тает следующим образом.До окончании обработки по команде от
./
t/$. 2
a В с d IIU
ФигЪ
