1458
устройство содержит шпиндель 4 с направляющими 6, управляемый привод и устройство прижима инструмента в виде двух однополюсно расположенных магнитов, один из которых закреплен на каретке 18, а второй - на инструменте 20, и двух экранов 26, установленных на направляющих 6 с возможностью свободного прохода в зазор между магнитами при выходе инструмента за край детали. Кроме того,
4
в устройстве предусмотрен управляе- мьш привод, выполненный в виде вариатора, выходной конус 3 которого связан с механизмом радиального перемещения инструмента, со щпинделем 4 и с осциллятором, соединенным с инструментом посредством гибкой связи 16. Таким образом, привод является многофункциональным и обеспечивает все рабочие перемещения инструмента . 4 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Заточной станок | 1980 |
|
SU891348A1 |
| Устройство для одновременной обработки цилиндрических и торцовых поверхностей | 1980 |
|
SU905016A1 |
| Шпиндельное устройство | 1981 |
|
SU986759A1 |
| Плансуппортная расточная головка | 1989 |
|
SU1748961A1 |
| Устройство для хромирования наружных поверхностей деталей | 1990 |
|
SU1737030A1 |
| Устройство для суперфиниширования | 1975 |
|
SU704764A1 |
| Приспособление для навивки пружин к токарному станку | 1988 |
|
SU1639849A1 |
| Горизонтально-хонинговальный станок | 1988 |
|
SU1611708A1 |
| Устройство для абразивной обработки | 1988 |
|
SU1664520A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ОТВЕРСТИЙ | 2013 |
|
RU2541230C1 |
Изобретение относится к области механической обработки оптических 77 поверхностей и может быть использовано при изготовлении осесиметричных крупногабаритных оптических деталей с отверстием. Целью изобретения является повышение точности формообразования поверхности путем обеспечения равномерности и постоянства давления в процессе обработки и при выходе инструмента за край детали, стабилизации линейной скорости инструмента и исключения высокочастотных ошибок формоо азования. Для этого / /У .. гз (Л ел х 12 Фuг.i
1
Изобретение относится к механической обработке оптических поверхностей и может быть использовано при изготовлении осесимметричных крупногабаритных оптических деталей с отверстием.
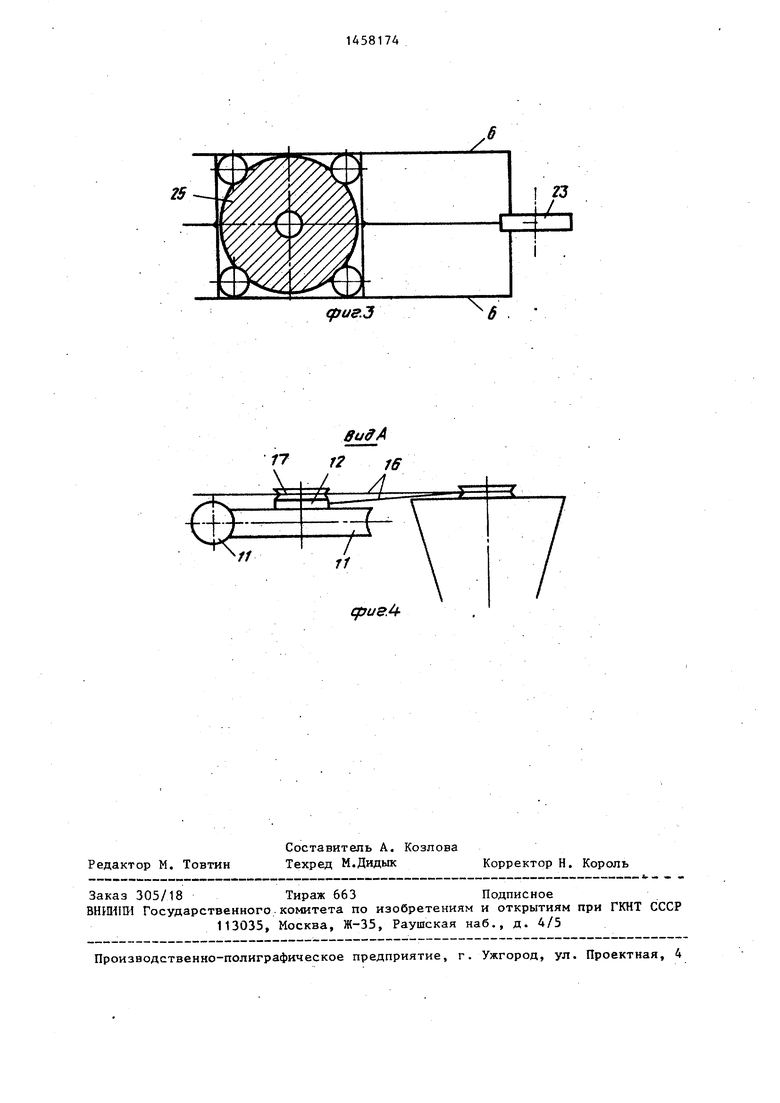
На фиг. 1 изображена кинематическая схема устройства; на фиг.2- направляющие с кареткой и механизмы прижима; на фиг. 3 - то же, вид сверху; на фиг. 4 - вид А на фиг. 1.
Устройстве Содержит конус 1 вариатора, связанный с двигателем- (не показан) и через ролик 2, установ- ленный параллельно образующей конуса
1 с возможностью осевого перемещения, с выходным конусом 3 вариатора, связанным через червячную передачу (не показана) с полым шпинделем 4, установленным соосно в отверстии обрабатываемой детали 5 и оканчивающимся в верхней части парой направляющих 6 с рабочей поверхностью, эквидистантной обрабатываемой поверхности детали 5, а нижней части - механизмам радиального перемещения в виде конической шестерней 7, находящейся в зацеплении через шестерни 8 с коническими шестернями 9, располрженными со осно на валу 10, соединенном через первичную передачу 11 с барабаном 12 Фиксатор .13 закреплен на валу 10 с возмржностью осевого перемещения и спления с одной из шестерен 9, в зависимости от сигнала управляющего устройства 14. На конусе 3 вариатора эксцентрично сидит шкив осциллятора 15, охваченный гибкой тягой 16, од
о 5
ним своим концом закрепленной на барабане 12, а другим - соединяющей его через вспомогательные щкивы 17, каретку 18, палец 19 с держателем инструмента 20. Тяга 21 соединяет барабан 12 с роликом 2 вариатора. Каретка 18 через гибкую тягу 22 связана с возвратной пружиной 23, расположенной на внешнем срезе направляющих 6, и посредством подшипников качения 24 упирается в направляющие 6 е возможностью радиального перемещения относительно детали 5. Палец 19, закрепленный на каретке 18, проходит в отверстие держателя инструмента 20 с. возможностью скользящего осевого перемещения. Устройство прижима инструмента выполнено в виде двух однополюсно расположенных магнитов 25, один из которых закреплен на каретке 18), а второй - на инструменте 20, и двух экранов 26 например, мз стали, установленных на направляющих 6 над краями детали 5 на уровне зазора между магнитами.
Устройство работает следующим образом.
При включении привода (не показан) конус 1 вариатора совершает вращательное движение. Через ролик 2 вариатора, конус 3 и червячную передачу (не показана) вращение передается полому шпинделю. 4 с направляющими 6. Через тягу 16 осциллирующие перемещения шкива 15 сообщаются инструменту 20 и устанавливается положение ролика 2 йариатора, соответст314
вующее положению центра осцилляции инструмента 20.
При вращении шпинделя А через шестерни 7, 8, 9, вал 10, червячную передачу 11, барабан 12 и тягу 16 сообщается перемещение ролику 2 вариатора, и соответственно перемещается центр осцилляции инструмента 20, причем направление перемещения зависит от сцепления вала 10 с одной из шестерен 9 фиксатором 13, управляемым от устройства 14.
При выходе инструмента 20 за край детали 5 экраны 26 входят в зазор между магнитами инструмента 20 и каретки 18, уменьшая давление инструмен та на деталь.
Таким образом, в процессе обработ- ки инструмент 20 относительно детали 5 совершает осциллирующие движения в радиальном направлении. Центр осцилляции инструмента перемещается с постоянной линейной скоростью по спиральной траектории, определяемой управляющим устройством 14, причем количество осцилляции инструмента за любой один виток спирали постоянно, равно передаточному отношению между конусом 3 вариатора и шпинделем 4 и подбирается как отношение простых чисел, что исключает возникновение
74
высокочастотных ошибок формообразования, обусловленных переналожением тректорий инструмента.
Формула изобретения
Устройство для обработки асфериче ких поверхностей, содержащее привод, механизм радиального перемещения инструментов, связанный со шпинделем, соединенным с направляющими, на которых установлены с возможностью перемещения вдоль них каретки с держателями инструментов, несущие механизм их прижима к детали, отличающееся тем, что, с целью повьш1ения точности обработки, привод вьшолнен в виде связанного со шпинделем вариатора, а устройство снабжено социллятором инструмента, смонтированным на выходном звене вариатора и соединенным посредством: системы гибкой связи с кареткой и механизмом радиального перемещения, при этом механизм прижима выполнен в виде одноименных магнитов, закрепленных в каретке и держателе с зазором между ними, предназначенным для размещения в нем введенных в устройство экранов, смонтированных в центре и на периферии направляющих.
ef3e/.2
дзиг.З
гз
qpus.
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ АСФЕРИЧЕСКИХ ПОВЕРХНОСТЕЙ | 1971 |
|
SU427837A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
