С
Начало
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| СПОСОБ КАЛИБРОВКИ СЕНСОРОВ КОЛЕСНОЙ ОДОМЕТРИИ | 2023 |
|
RU2821391C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| СИСТЕМА КОРРЕКЦИИ ТРАЕКТОРИИ ДВИЖЕНИЯ АВТОМОБИЛЯ ПРИ БОКОВОМ ВЕТРОВОМ ВОЗМУЩЕНИИ | 2006 |
|
RU2320511C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВЫВОДА СУДНА НА ЗАДАННУЮ ПРЯМОЛИНЕЙНУЮ ТРАЕКТОРИЮ ПРОХОЖДЕНИЯ УЗКОГО УЧАСТКА ФАРВАТЕРА И УДЕРЖАНИЯ ЕГО НА ЭТОЙ ТРАЕКТОРИИ | 2009 |
|
RU2406645C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
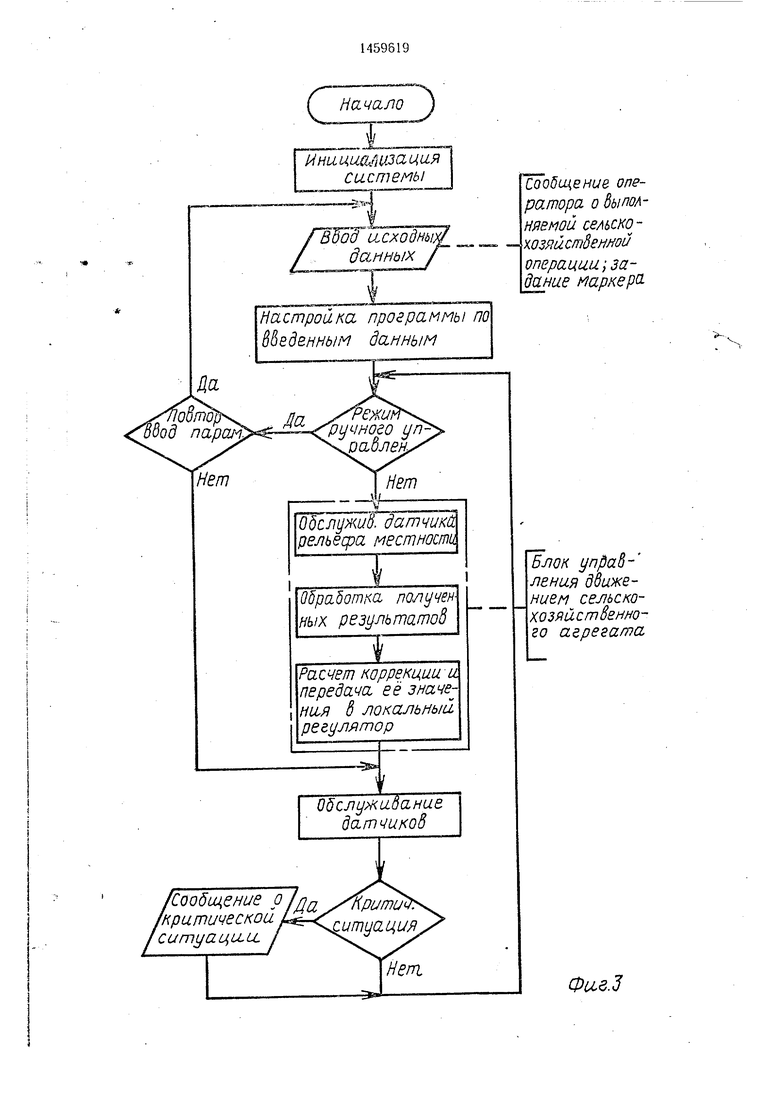
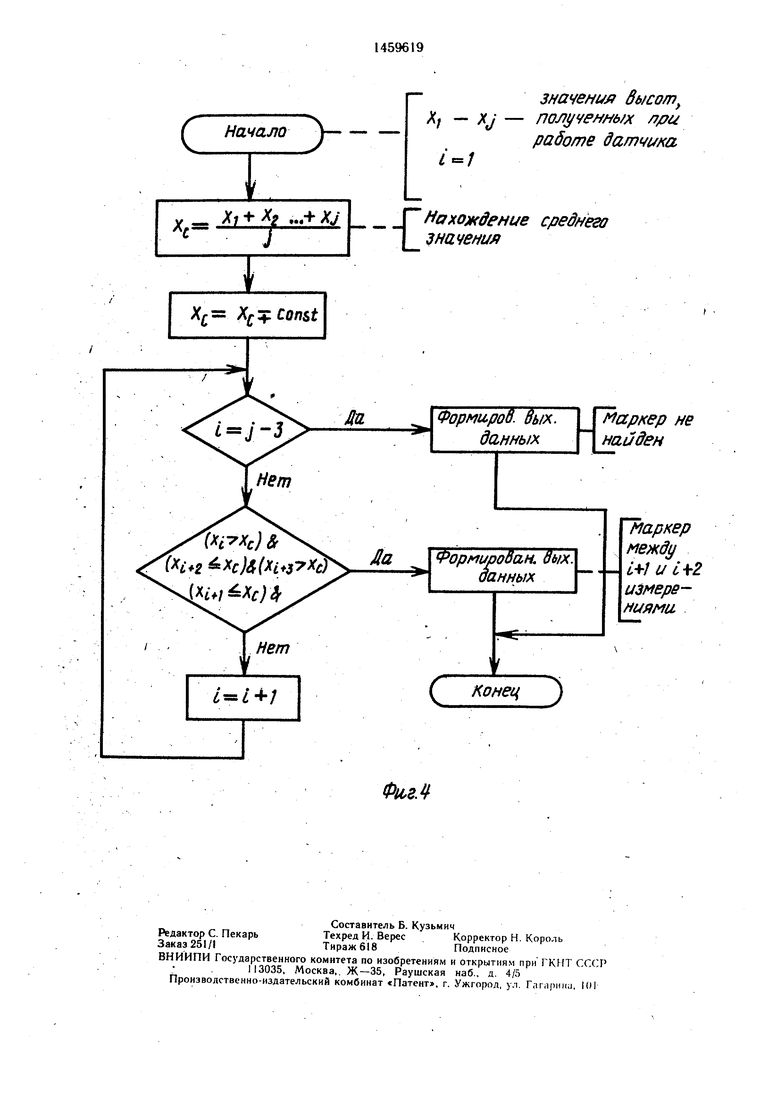
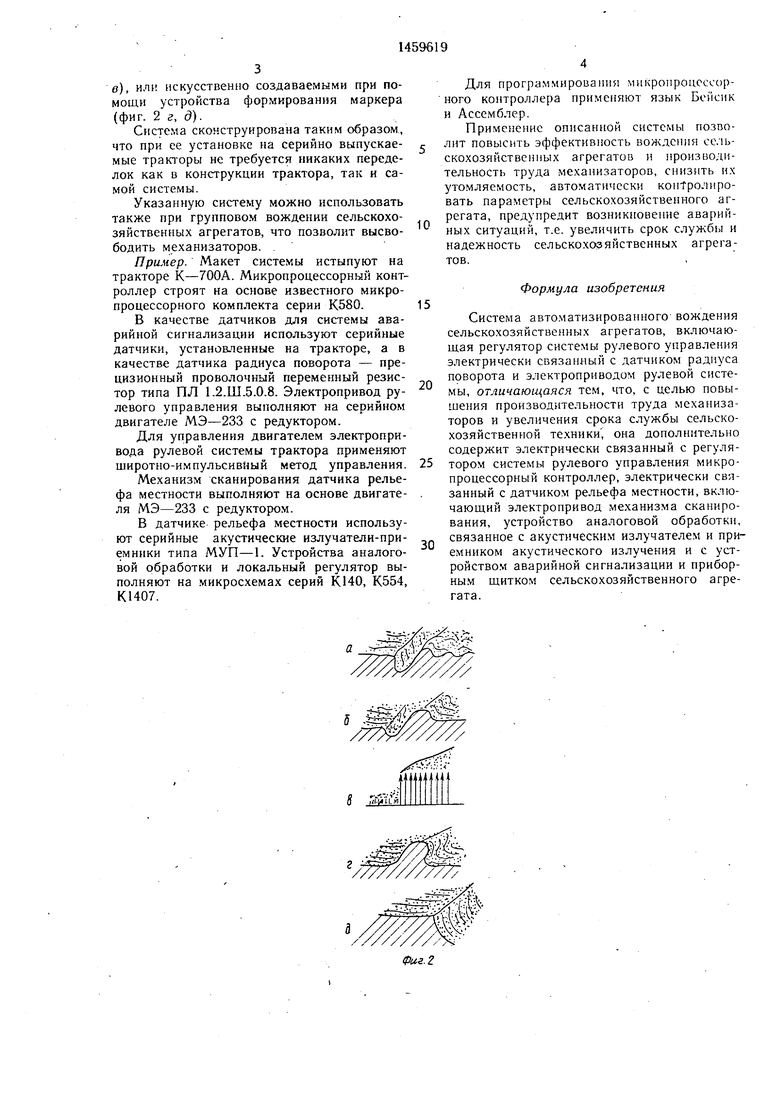
Изобретение относится к технике авто- матизированного управления движением сельскохозяйственных машинно-тракторных агрегатов (МТА). Цель изобретения , по- вышеиие производительности труда механизаторов и увеличение срока службы сельскохозяйственной техники. Система включает микропроцессорный контроллер 1. Управляющие устройства системы содержат локальный регулятор 2. Причем последний имеет комплексную структуру и содержит регулятор 3 системы рулевого управления, датчик 4 радиуса поворота и электропривод 5 рулевой системы. При этом датчик 6 рельефа местности включает электропривод 7 механизма сканирования, акустический излучатель 8 и приемник 9 акустического излучения. В состав системы входят также устройство 10 аналоговой обработки и устройство 11 аварийной сигнализации. МТА оснащен приборным щитком 12. Траектория движения МТА задается маркером 13. В. случае отклонения МТА от заданной траектории микроконтроллер 1 обрабатывает полученные результаты, вычисляет велнчину отклонения и выдает сигнал коррекции на регулятор 3 системы рулевого управления с учетом сигнала с датчика 4 радиуса поворота. МТА выходит на заданную траекторию движения. 4 ил: « сл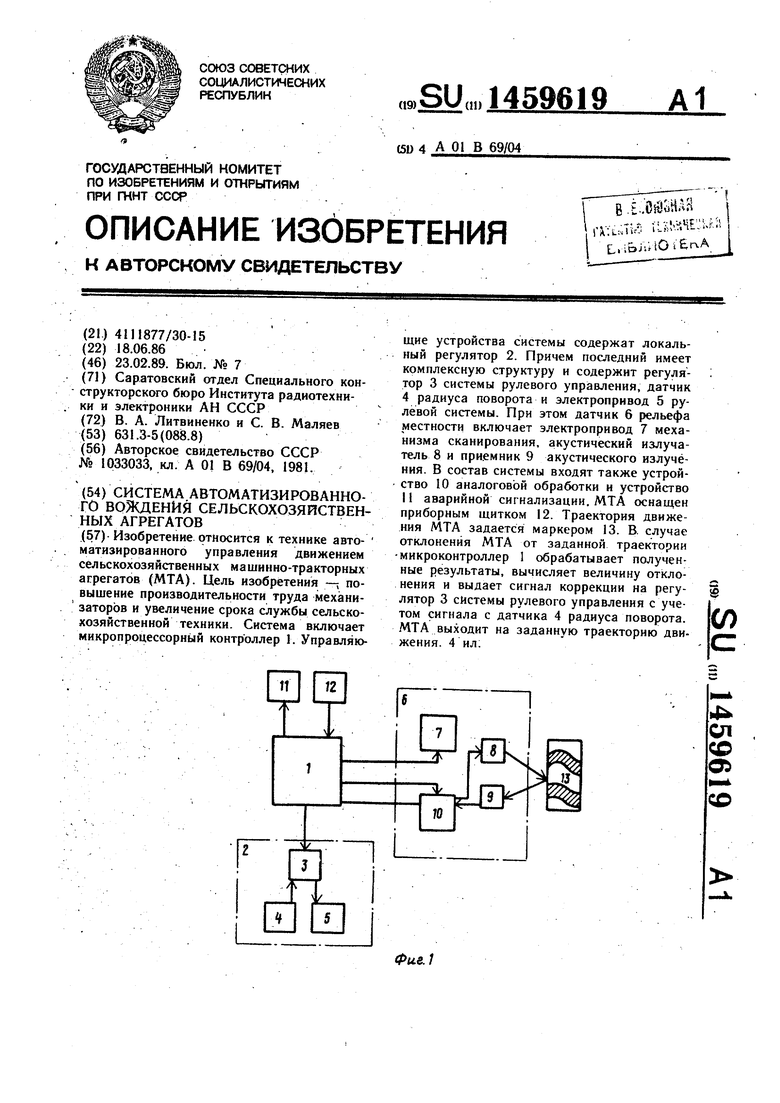
Ими nua/iU3u цая системы
Воод асходны) dciHHbixj
Наст рои проераммы по ё&едвнным данным
Одсл1/жид. датчики, рельесра местности
05ра.5от,а, получен ных результатов
Расчет коррекции-а передала её значения 8 локальный, регуллтор
Обслужабание да т и ко 8
fCoo6u4eHue р (критической ситуацией. / :
Нет
Сообщение оператора о дыПОАняёмой семско- wsRUcm sHHou
операции задание иарке о.
Блок ления ддиже- нием сельско- хозяйст8гнно- го а5регата
.З
С
Начало
у
у Лу г ««+ Aj
7
Х Const
J /
значение высот полу /еннь/х работе daniwf a
JT HaxoiKdenue среднеео значенил
Формиров. вь/х. данных
Гмар/(ер не найден
вых.
Маркер между и измерениями.
( Конец
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
