Изобретение относится к устройствам для манипулирования обрабатываемыми изделиями, конструктивно сопряженными с металлорежущими станками, и может быть использовано для автоматизированной загрузки (разгрузки) палет на станки типа Обрабатывакиций центр с использованием транспортных роботов типа Ротор.
Целью изобретения является расширение технологических возможностей и повышение точности позицирования при автоматизированной загрузке (разгрузке) палет на металлорежущий станок типа Обрабатывающий центр, работающего в гибком производственном режиме (гибкой производственной системе) с использованием транспортного (робота.
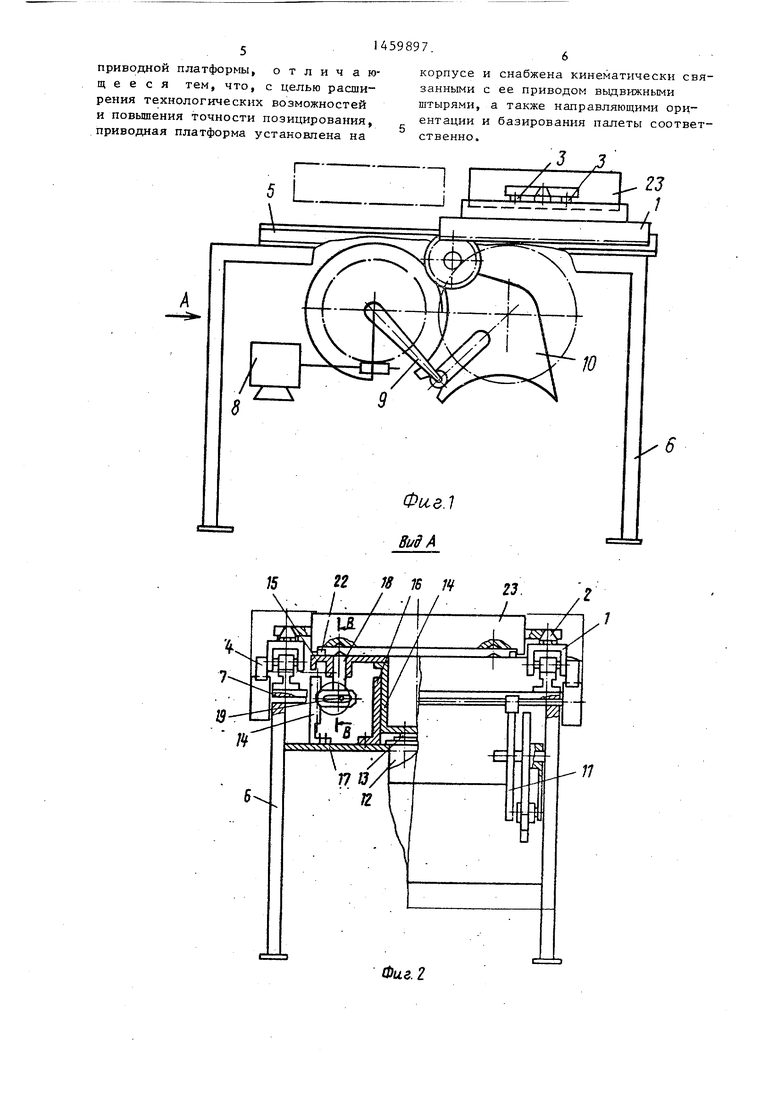
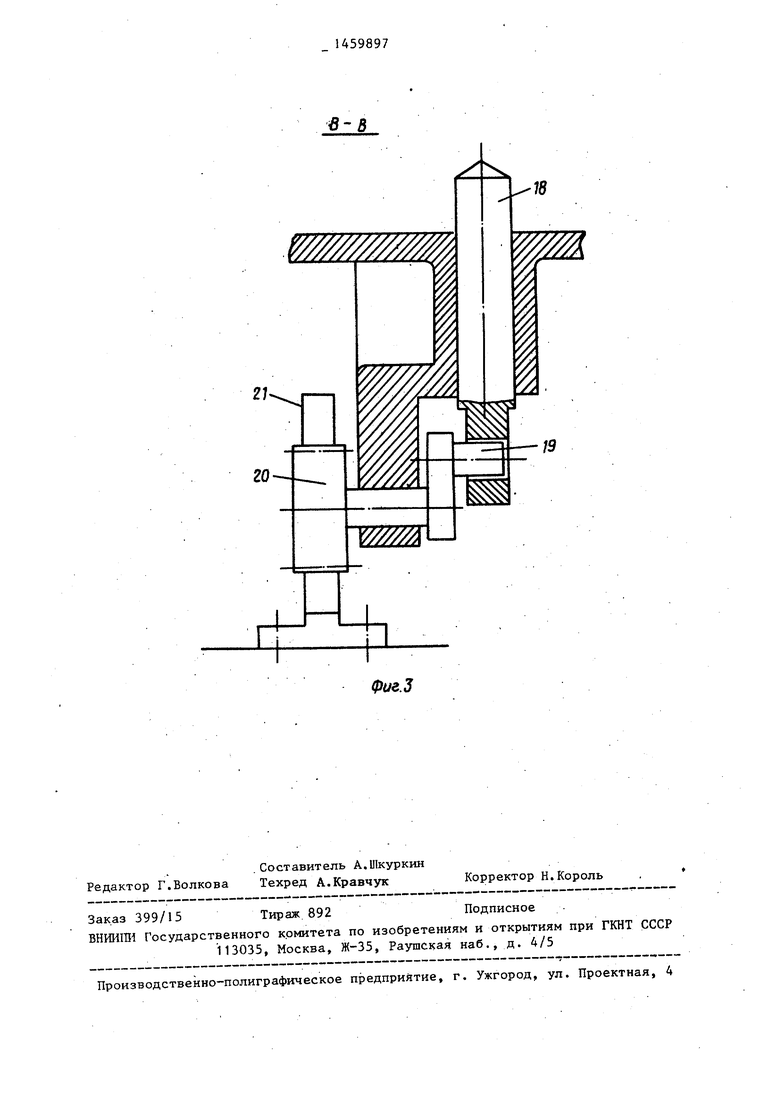
На фиг. 1 изображено предлагаемое устройство, вид спереди; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение В-Б на фиг. 2.
Устройство содержит передаточный орган, выполненный в виде кареток 1 с центрирующими 2 и регулируемыми опорными 3 элементами и регулируемыми зубчатыми рейками 4. Каретки 1 устанавливаются на направляющих 5 корпуса 6 на восьми радиально-упорных
4
сл
со
00
подшипниках (по 4 с каждой стороны), расположенных в отдельных корпусах, с возможностью регулирования корпусов в направлении, перпендикулярном рабочему перемещению кареток 1.
Каретки 1 посредством зубчатого зацепления рейки 4 связаны с валом 7, кинематически связанным с электроприводом 8 посредством водила 9 и кулисы- 10 мальтийского механизма и зубчатой передачи 11.
Подъемно-опускной механизм устройства содержит привод, выполненный в виде гидрощшиндра 12, работакяций от гидросистемы подъема (опускания) рабочего стола станка, шток 13 которого жестко закреплен со стаканом 14, на котором закреплена платформа 15.
по ответным в паяете элементом, выполненным в виде двойного конуса. При этом палета 23 занимает строго определенное положение над центрирующими элементами 2 кареток 1. При достижении кривошипами 19 нижней мертвой точки штыри 18 утопают в платформе 15, а палета 23 центрируется элементами 2 и устанавливается на опорные элементы 3 кареток 1;
Перемещение кареток 1 с установ- ле,нной на них п.алетой 23 в крайнее правое положение осуществляется по 15 команде от электропривода 8, который вращением водила 9 поворачивает кулису 10 мальтийского механизма, связанную посредством зубчатой пары 1 1 с приводным валиком 7, кинематически
10
Стакан l 4 с платформой 15 перемещают- 20 связанным с зубчатыми рейками 4 ка- ся во втулке 16, жестко соединенной реток 1. с плитой 17 корпуса 6. Через сквозные отверстия в платформе 15 проходят выдвижные штыри 18, связанные по
Загрузка приемо-передаточного стола станка осуществляется в обратной последовательности с использованием
средством кривошипов 19 с платформой 25 промьшшенного робота типа Ротор,
Платформа которого с расположенной на ней палетой 23 вертикально опускается и устанавливается на каретки 1. Точность позицирования при этом
30
15, а-посредством зубчатых колёс 20 - с зубчатыми рейками 21 жестко закрепленными на плите 17 корпуса 6.
Платформа 15 снабжена направляющими 22, предназначенными для стягивания по ним палеты 23 на приемно-пе- редаточный cTOji станка и, наоборот, для сталкивания палеты 23 с приемно- передаточного стола станка на подъемно-опускное устройство штоком захватного механизма.
Устройство работает следующим об- разом.
При разгрузке ПО команде от системы ЧПУ станка Смена палет палета 23 горизонтальным перемещением щтока захватного механизма станка перемещается по направляющим 22 платформы 15 на величину, определяемую ходом щтока захватного механизма станка, при этом каретки 1 находятся в крайнем левом положении в заторможенном состоянии, что обеспечивается кинематикой мальтийского механизма 9 и 10 при выключенном электроприводе 8.
При опускании платформы 15 с палетой 23 гидроцилиндром 12 вьщвижные щтыри 18 посредством кривошипов 19 и зубчатых колес 20, находящихся в зубчатом зацеплении с зубчатыми рейками 21, выдвигаются из отверстий платформы 15 и принимают палету 23, одновременно центрируя и фиксируя ее
35
40
достигается за счет возможности регулирования упоров для срабатывания датчиков останова робота.
Фиксация и точность позицирования кареток 1 обеспечивается мальтийс- KI-3M механизмом 9 и 10 и дополнительной при необходимости регулировкой реек 4.
Дня высокой надежности работы все ответные элементы фиксации на пале- те 23 выполнены с двойным конусом.
Выбег двигателя в крайних положениях не влияет на точность остановки кареток 1 в крайних положениях. При нахождении кареток 1 в крайних поло- 45 жениях электропривод выключен, каретки подвижны в пределах люфтов зубчатых зацеплений. Любое другое перемещение кареток 1 невозможно при .выключенном электроприводе. Последнее обеспечивается кинематикой мальтийского механизма.
Формула изобретения
с(. Приемно-передаточное устройство, содержащее корпус с направляющими, передаточный орган, размещенный в направляклцих, устройство подъема- опускания палет, выполненное в виде
50
по ответным в паяете элементом, выполненным в виде двойного конуса. При этом палета 23 занимает строго определенное положение над центрирующими элементами 2 кареток 1. При достижении кривошипами 19 нижней мертвой точки штыри 18 утопают в платформе 15, а палета 23 центрируется элементами 2 и устанавливается на опорные элементы 3 кареток 1;
Перемещение кареток 1 с установ- ле,нной на них п.алетой 23 в крайнее правое положение осуществляется по команде от электропривода 8, который вращением водила 9 поворачивает кулису 10 мальтийского механизма, связанную посредством зубчатой пары 1 1 с приводным валиком 7, кинематически
0
5
0
достигается за счет возможности регулирования упоров для срабатывания датчиков останова робота.
Фиксация и точность позицирования кареток 1 обеспечивается мальтийс- KI-3M механизмом 9 и 10 и дополнительной при необходимости регулировкой реек 4.
Дня высокой надежности работы все ответные элементы фиксации на пале- те 23 выполнены с двойным конусом.
Выбег двигателя в крайних положениях не влияет на точность остановки кареток 1 в крайних положениях. При нахождении кареток 1 в крайних поло- 5 жениях электропривод выключен, каретки подвижны в пределах люфтов зубчатых зацеплений. Любое другое перемещение кареток 1 невозможно при .выключенном электроприводе. Последнее обеспечивается кинематикой мальтийского механизма.
Формула изобретения
с(. Приемно-передаточное устройство, содержащее корпус с направляющими, передаточный орган, размещенный в направляклцих, устройство подъема- опускания палет, выполненное в виде
0
приводной платформы, отличающееся тем, что, с целью расширения технологических возможностей и повышения точности позицирования, приводная платформа установлена на
корпусе и снабжена кинематически связанными с ее приводом выдвижными штырями, а также направляющими ориентации и базирования палеты соответственно.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для очистки палет и деталей | 1986 |
|
SU1393595A1 |
| Гибкая автоматизированная линия | 1988 |
|
SU1668104A1 |
| Устройство для очистки изделий | 1987 |
|
SU1488035A1 |
| Устройство для шаговой подачи заготовок в зону обработки | 1984 |
|
SU1346306A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Склад для хранения шин | 1986 |
|
SU1404419A1 |
| Устройство для подачи листовых заготовок в рабочую зону пресса | 1991 |
|
SU1777569A3 |
| Грейферная подача к многопозиционномупРЕССу | 1979 |
|
SU841736A1 |
| Автомат И.А. Щелконогова и С.А. Фарамазова для механизированного брикетирования и выгрузки твердого битума из открытого котлована | 1960 |
|
SU141428A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1299772A1 |
Изобретение относится к устройствам для манипулирования обрабатываемыми изделиями, конструктивно сопряженными с металлорежущими станками, и может быть использовано для автоматизированной загрузки палет на станки. Цель изобретения - расширение технологических возможностей и повышение точности позиционирования-при автоматизированной загрузке палет. Палета 23 горизонтальным перемещением штока захватного механизма станка перемещается по направляющим 22 на платформу 15. При опускании платформы 15 выдвижные штыри 18 посредством кривошипов 19 и зубчатых колес, находящихся в зубчатом зацеплении с зубчатыми рейками, выдвигаются из отверстий платформы 15 и принимают па- лету 23, одновременно центрируя и фиксируя ее по ответным в палете элементам. При этом палета 23 занимает строго определенное положение над центрирунлцими элементами 2 кареток 1 . При достижении кривошипами 19 нижней мертвой точки штыри 18 утопают в платформе 15, а палета 23 устанавливается на каретках 1. Далее палета может перемещаться на каретках 1 в другое положение. Загрузка станка производится в обратном порядке. 3 ил. С i (Л
/5П 18 16 Щ
. /
п
3 3
Г
г 1-I LLLMll J. /
23
I
Фиг. 2
в-В
18
фиг.З
| Приемно-передаточное устройство и транспортно-накопительная система поточной линии | 1983 |
|
SU1180233A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
