1
Изобретение относится к робототехнике и может быть использовано при создании цикловых промышленных роботов.
Целью изобретения является повышение надежности устройства за счет исключения аварийной ситуации, вызванной выходом из строя датчиков положения.
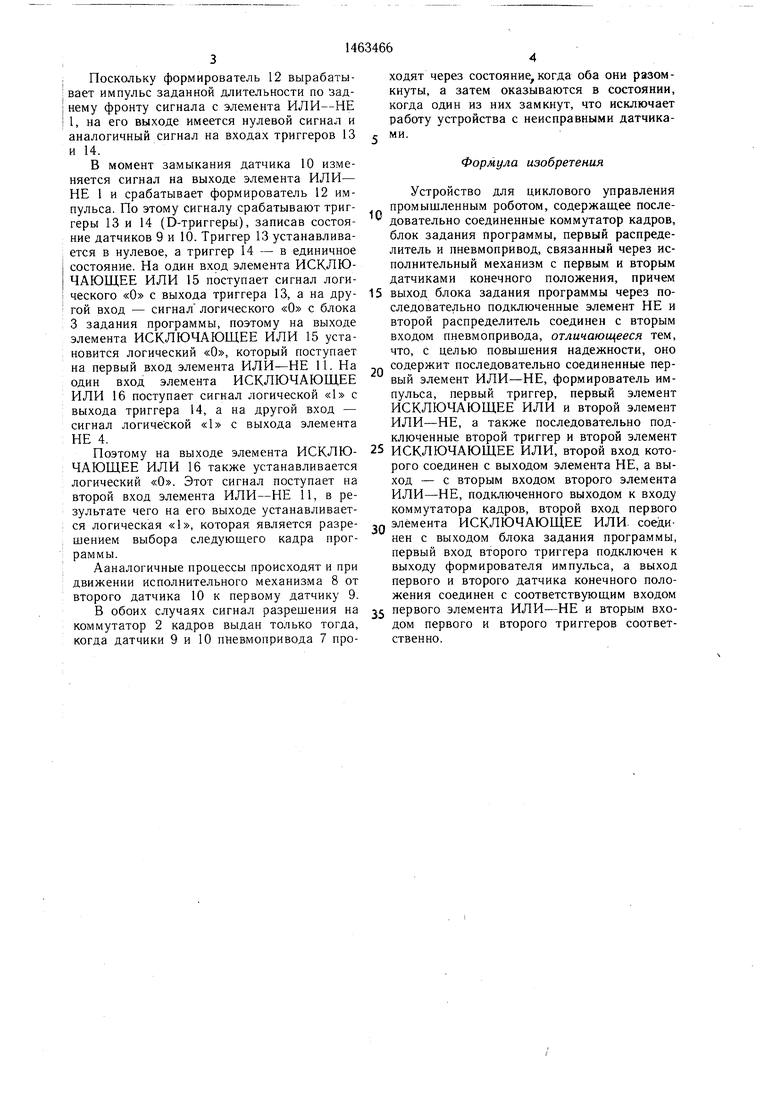
На чертеже представлена функциональная схема устройства.
На схеме показаны первый элемент ИЛИ- НЕ 1, коммутатор 2 кадров, блок 3 задания программы, элемент НЕ 4, первый 5 и второй 6 распределители, пневмопривод 7, исполнительный механизм 8, первый 9 и второй 10 датчики конечного положения, второй элемент ИЛИ-НЕ 11, формирователь 12 импульса, первый 13 и второй 14 триггеры, первый 15 и второй 16 элементы ИСКЛЮЧАЮЩЕЕ ИЛИ.
Устройство работает следуюшим образом.
Считывание информации, записанной в кадре, осуш,ествляется по сигналу разреше2
ния выбора следующего кадра, поступающего на вход блока задания программы от элемента ИЛИ-НЕ 1 через коммутатор 2 кадров.
Информация, записанная в рабочем разряде кадра, в зависимости от ее уровня (логический «О или «1) поступает либо прямо на распределитель 5, либо через элемент НЕ 4 на распределитель 6. В зависимости от этого один из распределителей 5 и 6 выдает команду на пневмопривод 7, который осуществляет перемещение исполнительного механизма 8 по направлению к одной из двух взаимно противоположных точек пневмопривода 7.
Предположим, что движение происходит по направлению от первого датчика 9 к второму датчику 10. Когда датчик 9 размыкается, на первом и втором входах элемента ИЛИ-НЕ 1 устанавливаются сигналы логического «О, а на его выходе устанавливается сигнал логической «1.
Од
со
4 Од О5
ходят через состояние когда оба они разомкнуты, а затем оказываются в состоянии, когда один из них замкнут, что исключает работу устройства с неисправными датчиками.
Формула изобретения Устройство для циклового управления
Поскольку формирователь 12 вырабаты1 вает импульс заданной длительности по задI нему фронту сигнала с элемента ИЛИ-НЕ
I 1, на его выходе имеется нулевой сигнал и
аналогичный сигнал на входах триггеров 13
и 14.
В момент замыкания датчика 10 изменяется сигнал на выходе элемента ИЛИ- НЕ 1 и срабатывает формирователь 12 импульса. По этому сигналу срабатывают триг- промышленным роботом, содержащее после- геры 13 и 14 (D-триггеры), записав состоя- довательно соединенные коммутатор кадров, ние датчиков 9 и 10. Триггер 13 устанавлива- блок задания программы, первый распреде- ется в нулевое, а триггер 14 - в единичное литель и пневмопривод, связанный через ис- состояние. На один вход элемента ИСКЛЮ- полнительный механизм с первым и вторым ЧАЮЩЕЕ ИЛИ 15 поступает сигнал логи- датчиками конечного положения, причем ческого «О с выхода триггера 13, а на дру- 15 выход блока задания программы через по- гой вход - сигнал логического «О с блока следовательно подключенные элемент НЕ и
второй распределитель соединен с вторым входом пневмопривода, отличающееся тем, что, с целью повышения надежности, оно
на первый вход элемента ИЛИ-НЕ 11. На п содержит последовательно соединенные пер- один вход элемента ИСКЛЮЧАЮЩЕЕ вый элемент ИЛИ-НЕ, формирователь импульса, первый триггер, первый элемент ИСКЛЮЧАЮЩЕЕ ИЛИ и второй элемент ИЛИ-НЕ, а также последовательно подключенные второй триггер и второй элемент
Поэтому на выходе элемента ИСКЛЮ- 25 ИСКЛЮЧАЮЩЕЕ ИЛИ, второй вход кото- ЧАЮЩЕЕ ИЛИ 16 также устанавливается рого соединен с выходом элемента НЕ, а выход - с вторым входом второго элемента ИЛИ-НЕ, подключенного выходом к входу коммутатора кадров, второй вход первого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ. соединен с выходом блока задания программы, первый вход второго триггера подключен к
3 задания программы, поэтому на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 15 установится логический «О, который поступает
ИЛИ 16 поступает сигнал логической «1 с выхода триггера 14, а на другой вход - сигнал логической «1 с выхода элемента НЕ 4.
логический «О. Этот сигнал поступает на второй вход элемента ИЛИ-НЕ 11, в результате чего на его выходе устанавливается логическая «1, которая является разрешением выбора следуюш,его кадра программы.
Ааналогичные процессы происходят и при движении исполнительного механизма 8 от второго датчика 10 к первому датчику 9.
30
выходу формирователя импульса, а выход первого и второго датчика конечного положения соединен с соответствуюш,им входом В обоих случаях сигнал разрешения на первого элемента ИЛИ-НЕ и вторым вхокоммутатор 2 кадров выдан только тогда, дом первого и второго триггеров соответкогда датчики 9 и 10 пневмопривода 7 про- ственно.
ходят через состояние когда оба они разомкнуты, а затем оказываются в состоянии, когда один из них замкнут, что исключает работу устройства с неисправными датчиками.
Формула изобретения Устройство для циклового управления
мышленным роботом, содержащее после- ательно соединенные коммутатор кадров, к задания программы, первый распреде- ель и пневмопривод, связанный через ис- нительный механизм с первым и вторым чиками конечного положения, причем ход блока задания программы через по- довательно подключенные элемент НЕ и
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для циклового управления промышленным роботом | 1982 |
|
SU1037211A1 |
| Устройство для циклового программного управления | 1988 |
|
SU1508193A1 |
| Устройство для формирования управляющих программ | 1985 |
|
SU1257616A1 |
| Устройство для циклового программного управления | 1981 |
|
SU1003019A1 |
| Устройство для циклового программного управления | 1984 |
|
SU1231488A1 |
| Цикловая система программного управления манипулятором | 1983 |
|
SU1097971A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для программного управления станком | 1985 |
|
SU1352458A1 |
| Устройство для циклового программного управления | 1979 |
|
SU773573A1 |
| Устройство управления укладчиком листового стекла | 1988 |
|
SU1551664A1 |

Изобретение относится к области робототехники и может быть использовано при создании цикловых роботов. Цель изобретения - повышение надежности устройства. Устройство содержит блок задания программы, коммутатор кадров, пневмопривод с распределителями, который через исполнительный механизм связан с датчиками конечных па1ожений, а также триггеры, логические элементы, формирователь импульса. Информация, записанная в рабочем разряде, из блока задания программы поступает на один из распределителей. Пневмопривод осу- ш,ествляет перемещение исполнительного механизма в одно из крайних положений. С помощью триггеров производится запоминание состояния датчиков конечных положений. После обработки заданных перемещений с помощью логических элементов выдается разрешение на выбор следующего кадра программы. За счет введения в устройство триггеров, формирователя импульса и цепочки логических элементов исключается работа устройства с неисправными датчиками конечных положений. 1 ил.
| Устройство для циклового управления промышленным роботом | 1982 |
|
SU1037211A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
