В ОСНОВНОМ авт- св. Х° 109523 описывается автоматический захват, включающий раму, захватные крюки, шарнирно соединенные жесткими тягами с подвижной по вертикали траверсой, и механизм фиксации рычагов захвата. Однако такой захват непригоден для поштучной транспортировки листового металлаОписываемый захват для подъема и перемеш,ения отдельных листов с гладкой поверхностью снабжен смонтированными на раме вакуумными присосными головками и гидравлическим демпфером, цилиндр которого шарнирно соединен с рамой, а шток поршня-с траверсой, обеспечивающим включение захватных крюков после отделения листа от пакета.
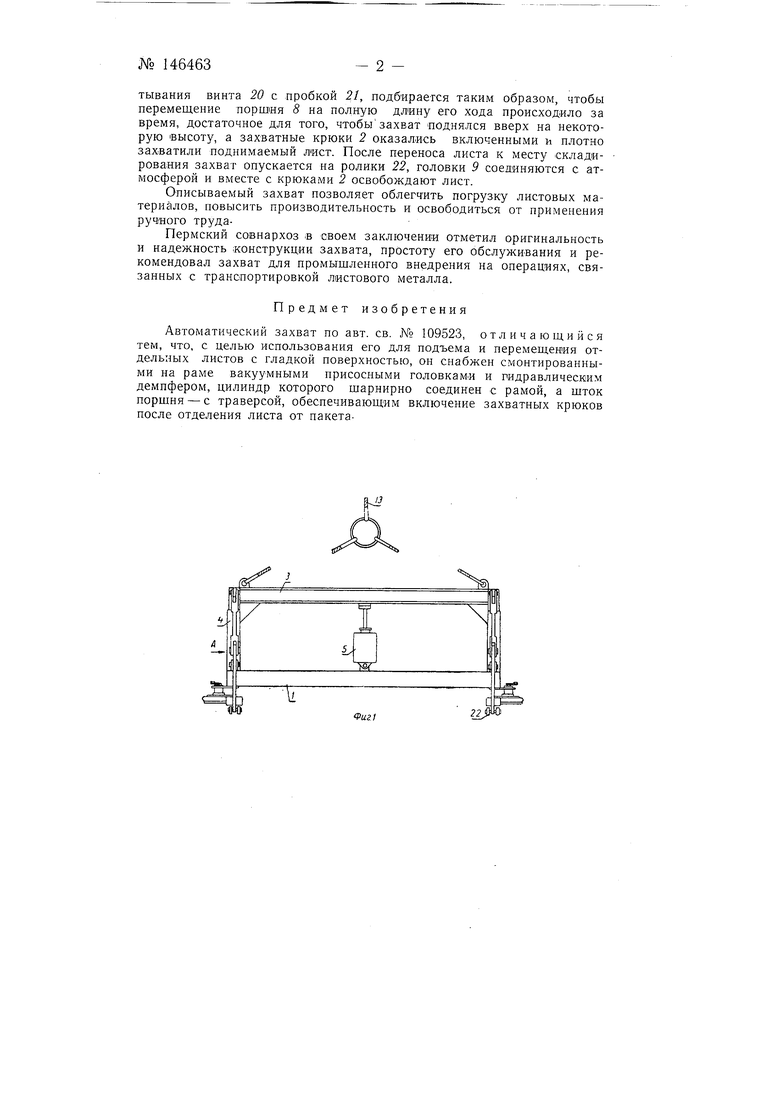
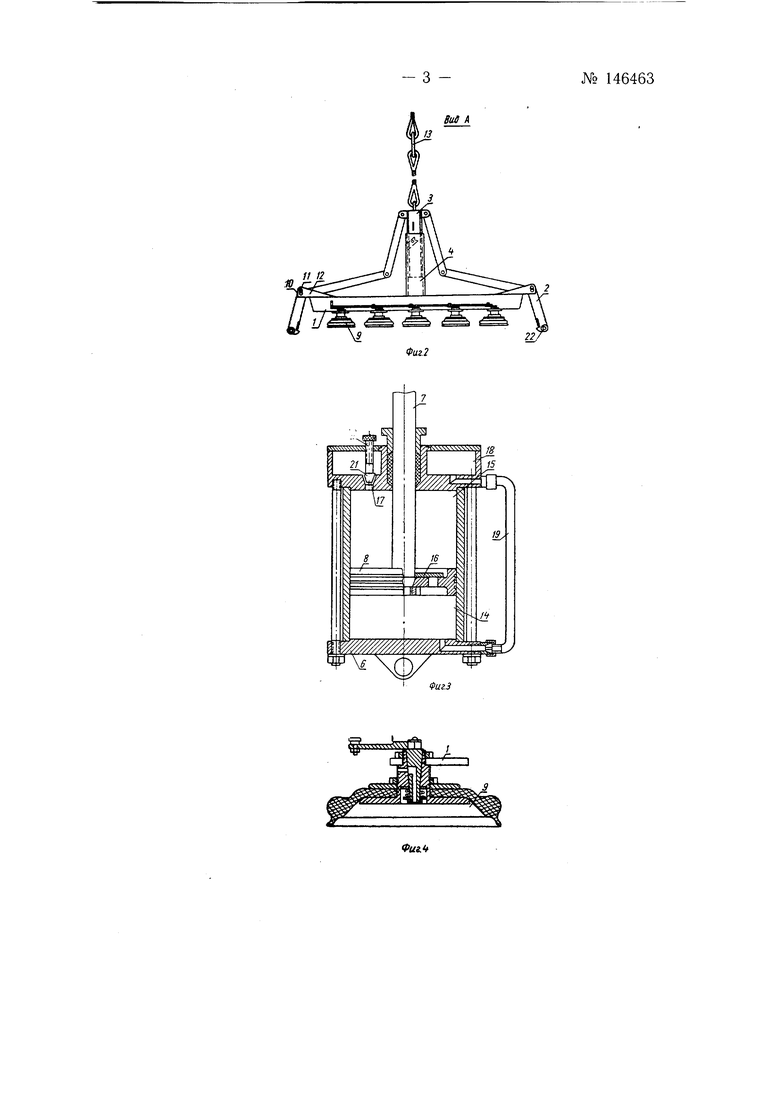
На фиг. 1 изображен предлагаемый захват; на фиг. 2 - то же, вид по стрелке А на фиг. 1; на фиг 3 - гидравлический демпфер; на фиг. 4 - вакуумная пр-исосная головка.
Автоматический захват состоит из рамы /, захватных крюков 2, шарнирно соединенных с рамой траверсы 3, вертикально подвижной в стойках 4, гидравлического демпфера 5, цилиндр 6 которого шарнирно соединен с рамой У, а шток 7 поршня 8-с траверсой 3, и вакуумных головок Р, смонтированных на раме 1.
При опускании захвата на пакет листов пальцы 10 крюков 2 перемещаются в пазах 11 кронштейнов 12, благодаря чему головки 9 ложатся на верхний лист пакета; из-под них вытесняется воздух и они присасываются к верхнему листу. Затем захват поднимается вверх на канате 13. При этом рабочая жидкость, свободно проходящая при опускании захвата из полости 14 в полость 15 через клапан 16, задерживается последним и проходит сквозь регулируемое отверстие 17 в полость 18, откуда она по трубке 19 перетекает в полость 14. Величина проходного сечения отверстия 17, определяемая степенью завертывания винта 20 с пробкой 21, подбирается таким образом, чтобы перемещение поршня 5 на полную длину его хода происходило за время, достаточное для того, чтобызахват поднялся вверх на некоторую высоту, а захватные крюки 2 оказались включенными и плотно захватили поднимаемый лист. После переноса листа к месту складирования захват опускается на ролики 22, головки 9 соединяются с атмосферой и вместе с крюками 2 освобождают лист.
Описываемый захват позволяет облегч-ить погрузку листовых материалов, повысить производительность и освободиться от применения ручиого трудаПермский совнархоз -в своем заключении отметил оригинальность и надежность конструкции захвата, простоту его обслуживания и рекомендовал захват для промышленного внедрения на операциях, связанных с транспортировкой листового металла.
Предмет изобретения
Автоматический захват по авт. св. № 109523, отличаю пдийся тем, что, с целью использования его для подъема и перемещен1ия отдельных листов с гладкой поверхностьЕО, он снабжен смонтированными на раме вакуумными присосными головкам и и гидравлическим демпфером, цилиндр которого шарнирно соединен с рамой, а шток поршня - с траверсой, обеспечивающим включение захватных крюков после отделения листа от пакета.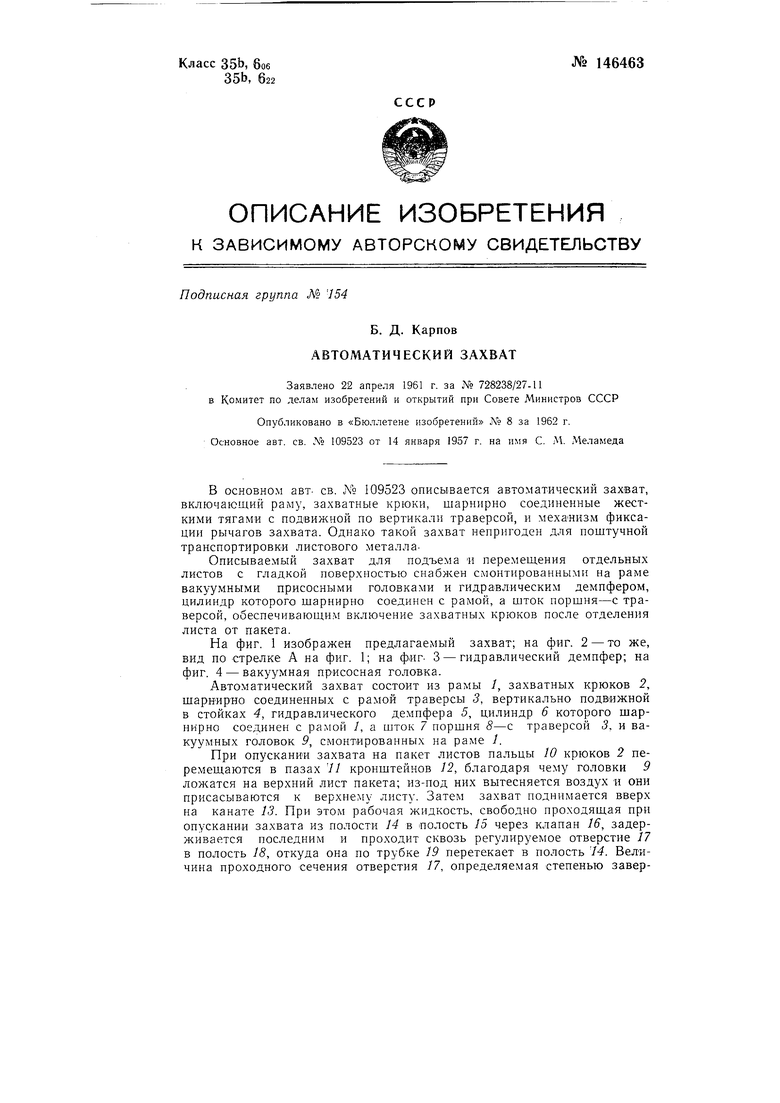
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумное грузозахватное устройство | 1982 |
|
SU1054268A2 |
| Автоматический захват | 1960 |
|
SU135619A1 |
| Автоматический захват | 1961 |
|
SU142740A1 |
| Вакуумное захватное устройство | 1980 |
|
SU925836A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ | 1966 |
|
SU178465A1 |
| Захватное устройство для контей-HEPOB | 1979 |
|
SU816932A1 |
| Автоматический захват для штучных грузов | 1975 |
|
SU549399A1 |
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Автоматический захват для железобетонных плит | 1961 |
|
SU144269A1 |
2
