фиг.
//-//
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1985 |
|
SU1289679A1 |
| СПОСОБ ЗАХВАТА МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2746910C1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват промышленного робота | 1983 |
|
SU1177150A2 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Устройство для подготовки радиоэлементов с осевыми выводами к монтажу | 1986 |
|
SU1370805A2 |
| Захватное устройство | 1987 |
|
SU1444142A1 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
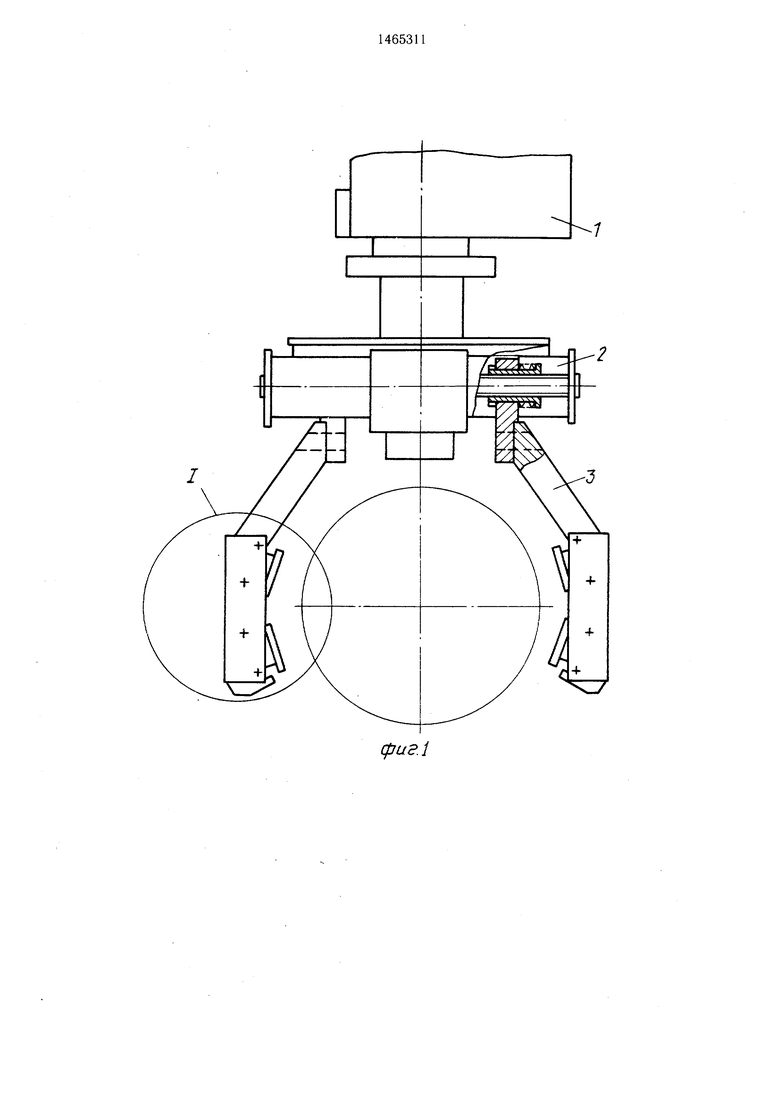
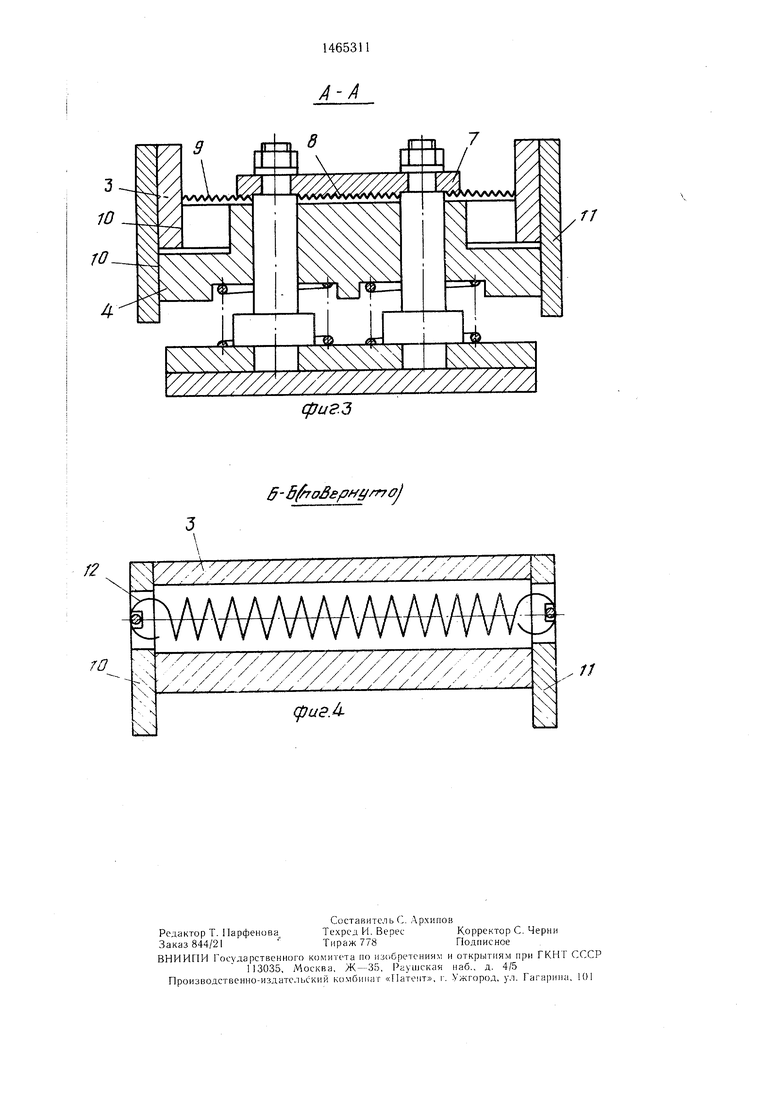
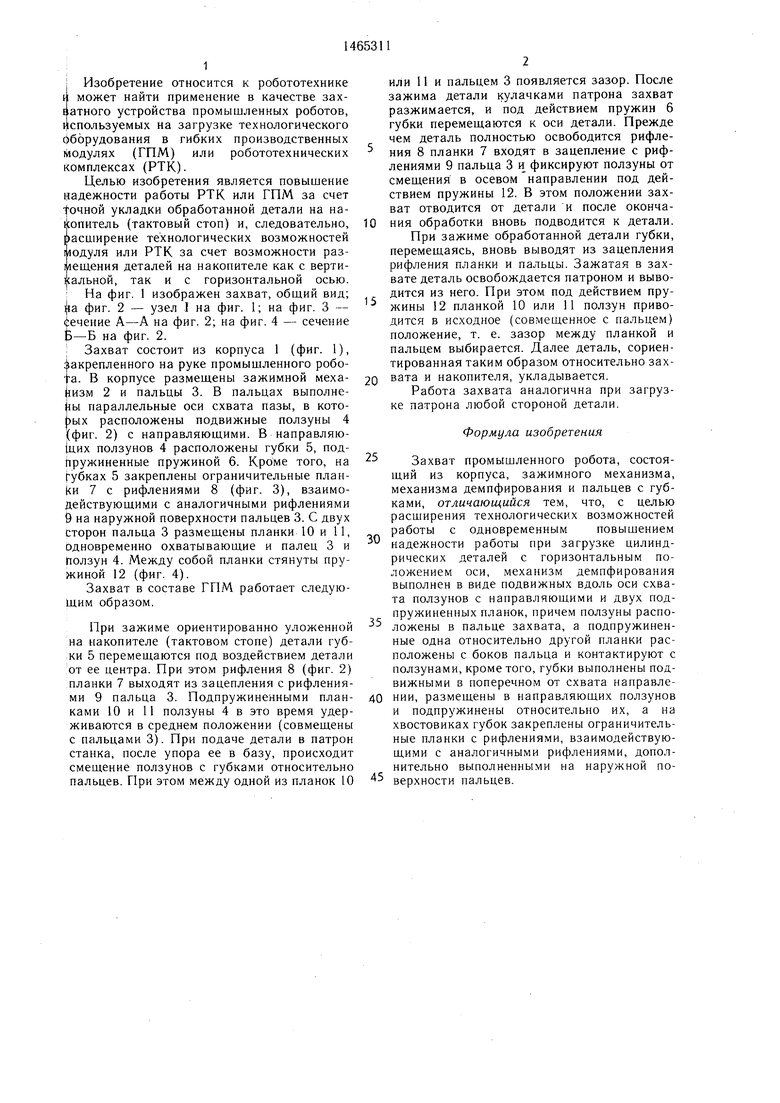
Изобретение относится к робототехнике и может найти применение в качестве захватного устройства промышленных роботов. Целью изобретения является повышение надежности работы робототехнических комплексов, а также расширение их технологических возможностей. Устройство имеет корпус, закрепленный на руле промышленного робота. В корпусе закреплен зажимной механизм и пальцы 3. В пальцах выполнены параллельные оси схвата пазы, в которых расположены подвижные ползуны 4 с направ- ляюшими. В направляющих ползунов 4 расположены губки 5, подпружиненные пружиной 6. На губках 5 закреплены ограничительные планки 7 с рифлениями, взаимо- действуюш,ие с аналогичными рифлениями на наружной поверхности пальцев 3. С двух сторон пальца 3 размешены планки 11, одновременно охватываюш,ие и палец 3, и ползун 4. Между собой планки стянуты пружиной 12. 4 ил.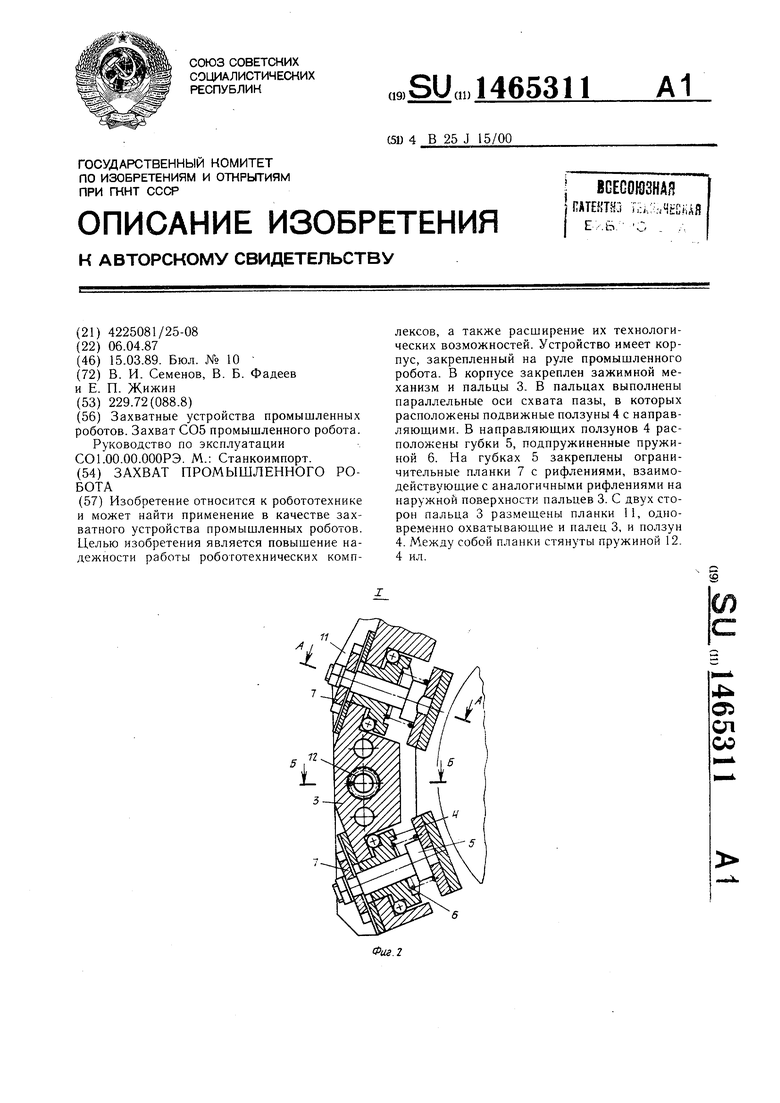
(игз
5- 6 7aBe ff&rr7oJ
го
| Захватные устройства промышленных роботов | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| М.: Станкоимпорт. | |||
