(Л
4; 4
4
Изобретение относится к станкостроению в частности к зах ватным приспособлениям промышленных роботов.
Цель изобретен ия - расширение технологических возможностей.
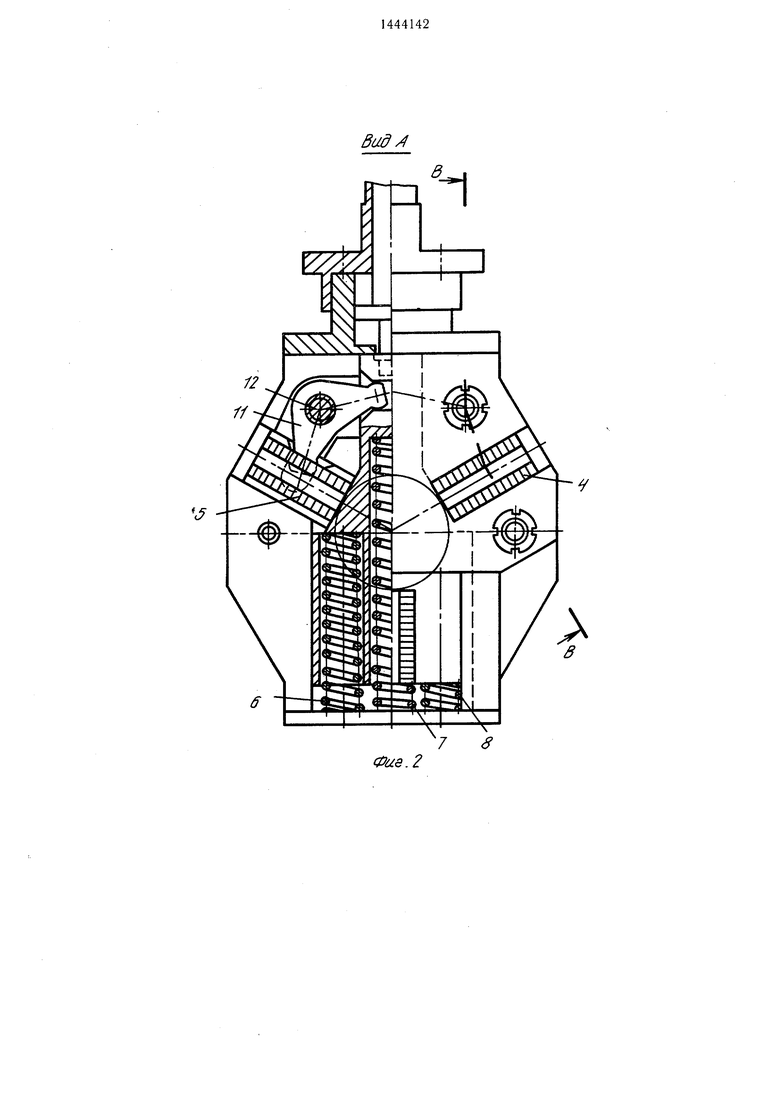
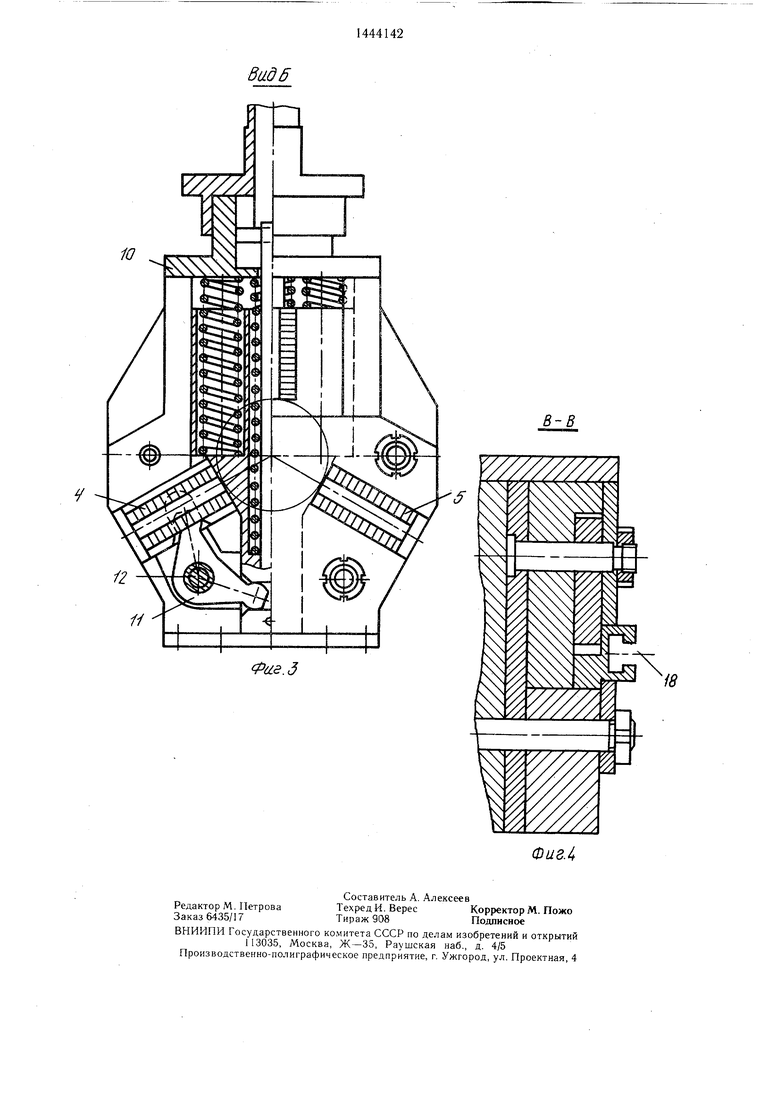
На фиг. 1 показано захватное устройство, разрез; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1.
Захватное устройство содержит корпус 1, на котором справа и слева симметрично продольной оси устройства установлены ведущие ползуны 2 и 3, а также две группы вспомогательных ползунов 4 и 5 (фиг. 1-3). В ведуш.их ползунах 2 и 3 выполнены глухие отверстия, в которых установлены силовые пружины 6, 7 и 8, одним торцом взаимодействующие с ведуш,и.ми ползунами 2 и 3, а другим - соответственно с упорной планкой 9 и ступицей 10. Кроме того, устройство содержит две группы двуплечих рычагов 11. установленных на осях 12 вращения, причем одним плечом каждый из рычагов 11 введен в соответствующий паз, выполненный во вспомогательных ползунах 4 и 5, а другим - в соответствующий паз, выполненный в ведущих ползунах 2 и 3. Устройство снабжено трехходовым приводом, выполненным, например, в виде гидроцилиндра с тремя фиксированными положениями (не показан). Тяга 13 одним концом связана со 1ПТОКОМ этого гидроцилиндра, а другим концо.м взаимодействует с упоро.м 14 или дополнительной тягой 15 и далее с ве- душ.им ползуном 2 и ведущи.м ползуном 3 соответственно. Непосредственный зажим изделий 16 осуществляется с помощью двух групп сменных губок 17, устанавливае.мых в Т-образных пазах 18, выполненных в ползунах 2-5.
Захватное устройство работает следую- щи.м образом.
Пусть в исходном состоянии с правой и левой сторон захватного устройства зажаты изделия 16, при этом тяга 13 находится в среднем положении, а пружины 6-8 воздействуют на ведущие ползуны 2 и 3, которые своими пазами развернули двуплечие рычаги 11 так, что они своими вторыми плечами смещают вспомогательные ползуны 4 и 5 обеих групп радиально к центру, обеспечивая тем самым зажим изделий 16 губками 17.
При необходимости разжима изделия 16, например находящегося справа, гидроцилиндр перемещает тягу 13 вниз, в результате чего упор 14 воздействует на ведущий
ползун 2, который, перемещаясь вниз, сжимает пружины 6-8 и своими пазами воздействует на правую группу рычагов 11. Последние, поворачиваясь вокруг осей 12, своими вторыми плечами через пазы, выполненные во вспомогательных ползунах 4 и 5, перемещают их в радиальном направлении от центра, обеспечивая тем самым разжим изделия 16, находящегося справа.
Для разжима изделия Г6, находящегося слева, гидроцилиндр перемещает тягу 13
вверх, в результате чего дополнительная тага 15 воздействует на ведущий ползун 3. Далее разжим изделия 16, находящегося слева, происходит аналогично описанному.
25
Формула изобретения
0
Захватное устройство, содержащее корпус, две группы зажимных губок, привод с тремя фиксированными положениями, кинематически связанный с синхронизирующим узлом, выполненным в виде приводной тяги и двух подвижных эле.ментов, снабженных пазами, отличающееся тем, что, с целью расширения технологических возможностей, оба подвижных элемента выполнены в виде ведущих ползунов, размещенных параллельно оси тяги И подпружиненных относительно корпуса, при этом один из ведущих ползунов снабжен дополнительной тягой с пазом, приводная тяга снабжена буртиком, предназначенным для взаимодействия с пазом до- 0 полнительной тяги ведущего ползуна и торцом другого ведущего ползуна, причем на каждом из ползунов закреплена одна из губок соответствующей группы.
Вид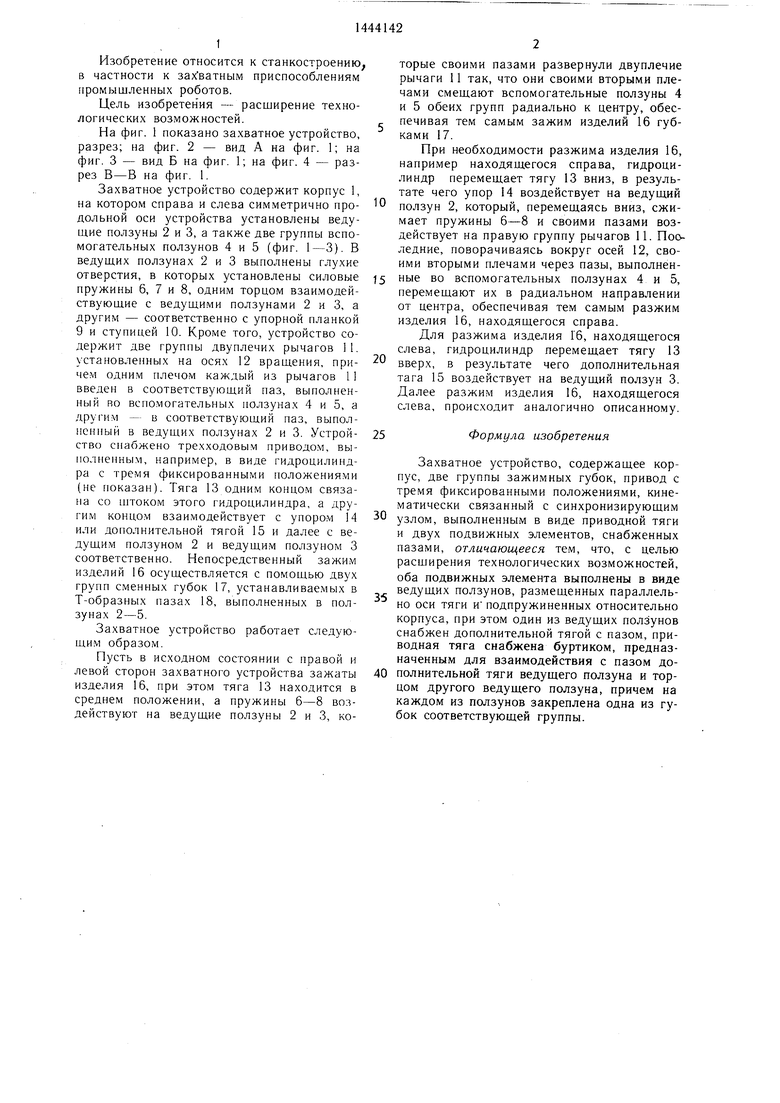
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1983 |
|
SU1161376A1 |
| Клещевая головка хобота ковочного манипулятора | 1983 |
|
SU1133013A1 |
| Манипулирующее устройство | 1981 |
|
SU967799A2 |
| Загрузочно-разгрузочное устройство | 1983 |
|
SU1115883A1 |
| Захват манипулятора | 1990 |
|
SU1834796A3 |
| Автооператор | 1988 |
|
SU1616800A1 |
| Токарный многошпиндельный станок | 1989 |
|
SU1660850A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Захватное устройство | 1985 |
|
SU1255430A1 |
| УСТРОЙСТВО ДЛЯ ЗАЦЕНТРОВКИ ЛИТЫХ ЗАГОТОВОК ПОД ПРОШИВКУ | 1995 |
|
RU2102166C1 |
Изобретение относится к станкостроению, в частности к захватным приспособлениям промышленных роботов. Цель изобретения - расширение технологических возможностей. Изделия 16 зажаты в двух группах зажимных губок. Тяга 13 находится в среднем положении. При разжиме одной из деталей тяга 13 перемещается вниз, упор 14 воздействует на ведущий ползун 2, который сжимает пружины и своими пазами воздействует на рычаги, которые раздвигают зажимные губки 17: При разжиме второй детали тяга 13 перемещается вверх, дополнительная тяга 15 воздействует на ведущий ползун 3, воздействующий на рычаги, которые раздвигают зажимные губки. 4 ил.
/f
//
m l
в
Фие.2
Вадб
У
| Схват | 1983 |
|
SU1161376A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
