М П 3

| название | год | авторы | номер документа |
|---|---|---|---|
| Несинхронная линия для изготовления и укладки одновитковых секций в пазы магнитопроводов электрических машин | 1986 |
|
SU1317574A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Сборочный автомат | 1982 |
|
SU1106626A1 |
| Транспортное устройство автоматической линии | 1985 |
|
SU1351749A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Устройство для шагового перемещения спутников | 1985 |
|
SU1305085A1 |
| Устройство для подачи и отбраковки упаковываемых предметов | 1982 |
|
SU1106747A1 |
| Загрузочный ротор | 1990 |
|
SU1757842A1 |
| Устройство для приварки проволочного вывода к корпусу радиодетали | 1984 |
|
SU1191222A1 |
| Устройство для приема и сталкивания вагонеток | 1982 |
|
SU1039831A1 |

Использование: в машиностроении, в частности при транспортировке изделий в процессе обработки. Сущность изобретения: механизм для переталкивания спутников 5 с основного 1 на отводящий 3 транспортер выполнен в виде двуплечих рычагов 12. Одно плечо каждого из рычагов размещено с возможностью взаимодействия со спутником 5, а другое связано с кареткой 13. Кроме того, упомянутый механизм снабжен подпружиненным рычагом 16. на котором закреплен толкатель 17, при этом конец рычага 16 взаимодействует с торцом спутника 5. Механизм перемещения спутников 5 выполнен в виде ползуна 6 с упором 15. Каретка 13 снабжена подпружиненной двуплечей собачкой 14. Одно плечо собачки 14 взаимодействует с толкателем 17, а другое - с упором 15 на ползуне 6. Ползун 6 перемещает спутники 5 посредством взаимодействия собачек 7 с упорами 8, выполненными на спутниках 4, Упоры 8 и гнезда для фиксации 9 выполнены на спутниках с шагом, соответствующим шагу размещения на них обрабатываемых изделий. 1 з.п.ф-лы, 4 ил. w Ј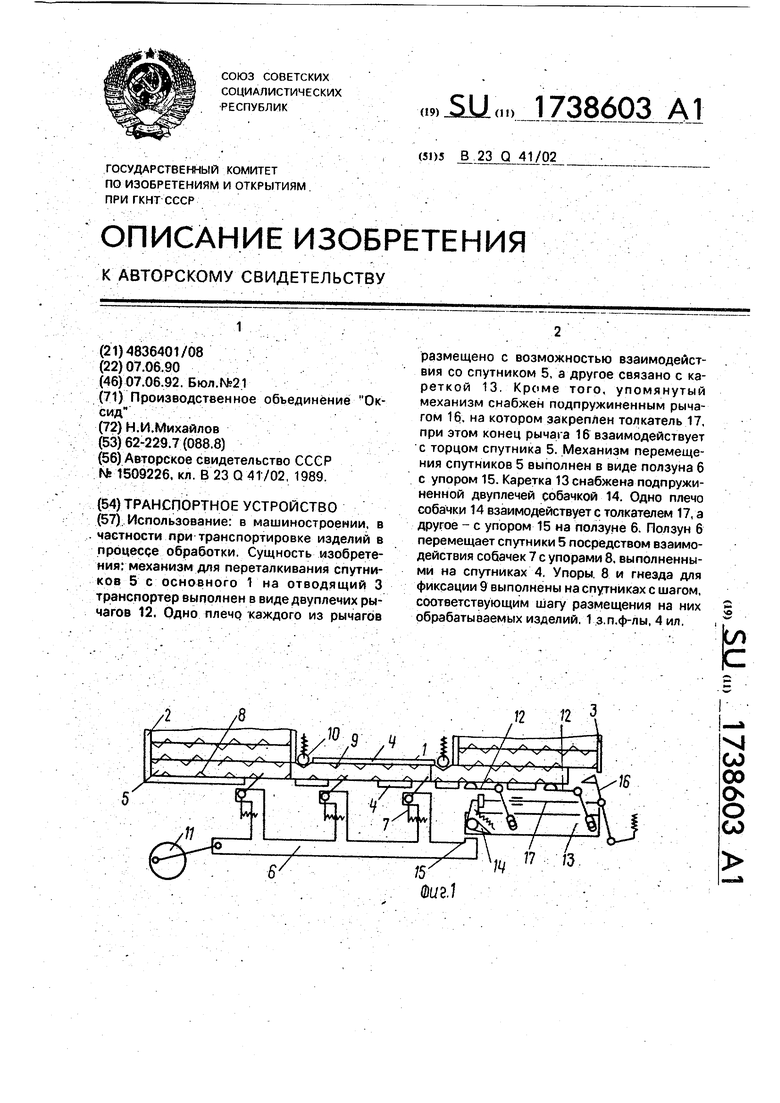
16
VI CJ 00
о о со
/5
/
Фиг. J
Изобретение относится к машиностроению, в частности к транспортировке изделий в процессе обработки.
Известны транспортные устройства, содержащие транспортер спутников с механизмом их фиксации, два перегрузочных транспортера, механизмы перемещения спутников, причем механизм фиксации спутников выполнен в виде подпружиненных упоров и двуплечих рычагов, расположенных у рабочих позиций, одно плечо каждого рычага подпружинено, на другом плече расположен ролик, а на спутниках выполнены выемки.
Однако такая конструкция сложна.
Наиболее близким к предлагаемому является транспортное устройство, содержащее основной и вспомогательные транспортеры для подачи и отвода прямоугольных в плане спутников с основного Оно имеет механизм перемещения и фиксации спутников на основном транспортере Для отвода спутников с основною транспортера на отводящий имеется механизм для переталкивания в виде пневмоцилинд ра.
Такое решение упрощает конструкцию, однако она непригодна для транспортировки многоместных спутников, в которых обрабатываемые изделия расположены с определенным шагом. При высокой скорости обработки изделий с циклом в доли секунды пневмопривод не обеспечивает точного срабатывания сталкивателя во времени. Кроме того, он при этом работает с ударами, что, как правило, неприемлемо.
Целью изобретения является повышение производительности.
Указанная цель достигается тем, что механизм для переталкивания спутников выполнен в виде двуплечих рычагов, одно плечо каждого из которых размещено с возможностью взаимодействия со спутником, а другое связано с дополнительно введенной кареткой, подвижной вдоль оси перемещения спутников.
Механизм для переталкивания снабжен подпружиненным рычагом с шарнирно закрепленным толкателем, а конец рычага размещен с возможностью взаимодействия с торцом спутника.
Механизм перемещения спутников выполнен в виде ползуна с упором, а каретка снабжена подпружиненной двуплечей собачкой, одно плечо которой установлено с возможностью взаимодействия с толкателем, а другое - с упором на ползуне.
Кроме того, ползун снабжен подпружиненными собачками, установленными с возможностью взаимодействия с упорами
дополнительно выполненными на спутниках, причем упомянутые упоры и гнезда для фиксации размещены на спутниках с шагом, соответствующим шагу размещения на
спутниках обрабатываемых изделий.
На фиг.1 изображено транспортное устройство, вид сверху, после подачи на основной транспортер с вспомогательного транспортера очередного спутника; на
0 фиг.2 - то же, после перемещения последнего спутника на позицию сталкивания; на фиг.З - то же, после сталкивания последнего спутника на отводящий транспортер; на фиг.4 - то же, после следующего перемеще5 ния спутников.
Транспортное устройство состоит из основного 1 и вспомогательных 2 и 3 транспортеров. Основной транспортер содержит направляющие планки 4, на которых может
0 находиться одновременно несколько спутников 5, и механизм перемещения и фиксации спутников, включающий ползун 6, на котором расположены собачки 7, взаимодействующие с упорами 8, которыми снаб5 жены спутники. Спутники несут несколько обрабатываемых изделий (до 30), расположенных с определенным шагом
С таким же шагом расположены упоры 8 и гнезда 9, с которыми взаимодействуют
0 подпружиненные фиксаторы 10.
Ползун 6 приводится в движение криво- шипно-шатунным механизмом 11, обеспечивающим плавно изменение скорости движения ползуна при любых скоростях (не5 сколько циклов в секунду).
Напротив отводящего транспортера 3 расположен механизм для переталкивания Спутников, выполненный в виде двуплечих рычагов 12. Одно плечо каждого рычага мо0 жет взаимодействовать со спутником, а другое связано с кареткой 13. На каретке установлена подпружиненная двуплечая собачка 14, которая имеет возможность взаимодействовать с упором 15 на ползуне 6.
5 Подпружиненный рычаг 16 установлен с возможностью взаимодействия со спутником при его подходе к отводящему транспортеру 3. На рычаге 16 шарнирно закрепле толкатель 17, который может
0 взаимодействовать с вторым плечом собачки 14.
Устройство работает следующим образом.
С поперечного вспомогательного транс5 портера 2 на основной рабочий транспортер
Iподается очередной спутник 5 (фиг.1).
Ползун 6 под воздействием механизма
IIсмещается вправо (фиг.2). Собачки 7, находясь в зацеплении с упорами 8, передвигают спутники на шаг, подводя на позицию
обработки следующее изделие. Фиксаторы 10, взаимодействуя с гнездами 9, обеспечивают нужное положение спутников.
Подошедший к отводящему транспортеру 3 спутник 5 отводит подпружиненный рычаг 16. При этом толкатель 17 освобождает собачку 14. Под воздействием пружины собачка поворачивается и входит в зацепление с упором 15 на ползуне 6.
При движении влево ползун 6 посредством собачки 14 смещает за собой и каретку 13 (фиг.З). При этом рычаги 12 поворачиваются и сталкивают спутник на отводящий транспортер 3. Одновременно освобождается рычаг 16, который возвращает толкатель 17 на прежнее место. Сталкивание производится синхронно с движением ползуна 6, поэтому происходит плавно без ударов.
При следующем ходе ползуна 6 вправо (фиг,4) собачка 14 под воздействием толкателя 17 выходит из зацепления с упором 15, каретка остается в правом крайнем положении, а рычаги 12 - в опущенном состоянии до прихода следующего спутника.
Вспомогательные транспортеры 2 и 3 можно расположить также и вертикально. При этом необходимо добавить собачки, которые удерживают отведенный спутник в поднятом состоянии.
Изобретение может быть использовано для перемещения многоместных спутников как в автоматических линиях так и в автономных автоматах, включающих в себя по- дающий и приемных накопители
спутников.
С использованием изобретения спроектирован высокопроизводительный автомат маркировки конденсаторов с осевыми выводами. Опытный образец устройства при испытании показал производительность 12
тыс.шт. изделий в час при обработке в 30- местных спутниках. Таким образом устройство обеспечивает цикл, равный 0,3 с.
Внедрение автомата в производство высвободит ориентировочно 46 чел. Формула изобретения 1. Транспортное устройство, содержащее основной и вспомогательные транспортеры для подачи и отвода спутников с изделиями, механизм перемещения спутников, фиксатор, установленный с возможностью взаимодействия с гнездами на спутниках, и механизм для переталкивания спутников с основного на отводящий транс- 5 портер, размещенный напротив последнего, отличающееся тем, что, с целью повышения производительности, механизм для переталкивания спутников выполнен в виде двуплечих рычагов, одно плечо каждо- 0 го из которых- размещено с возможностью взаимодействия со спутником, а другое связано с дополнительно введенной кареткой, подвижной вдоль оси перемещения спутников, при этом упомянутый механизм снаб- 5 жен подпружиненным рычагом с шарнирно закрепленным толкателем, а конец рычага размещен с возможностью взаимодействия с торцом спутника, при этом механизм перемещения спутников выполнен в виде пол- 0 зуна с упором, а каретка снабжена подпружиненной двуплечей собачкой, одно плечо которой установлено с возможностью взаимодействия с толкателем, а другое - с
упором на ползуне,
5 2. Устройство по п.1,отл ича ющее- с я тем, что ползун снабжен подпружиненными собачками, установленными с возможностью взаимодействия с упорами, дополнительно выполненными на спутни40 ках, причем количество упоров соответствует числу упомянутых гнезд.
W
Фиг. 2
17
| Транспортное устройство автоматической линии | 1987 |
|
SU1509226A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
