Пзобр тепие относится к холодной обработке мета.|.1С)в .чав.-1енисм и может быть псно,-|ьзовано д.чя уда,-1ения деталей с рабочего органа нггампа.
Целью изобретепия является pacnjHpenne те.хнологичееких возможностей путем удаления деталей различных габаритов.
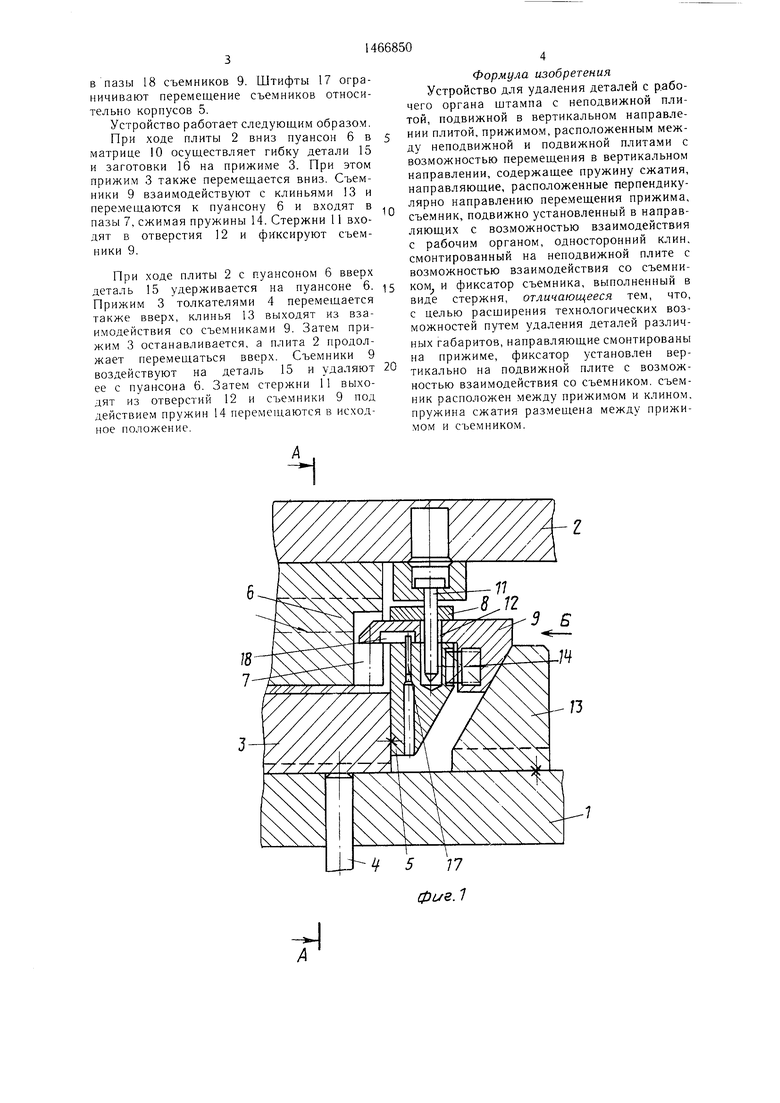
На фиг. 1 изображено устройство для удаления деталей с рабочего органа 1птампа- на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1.
Устройство содержит нижнюю неподвижную плиту 1, вер.хнюю подвижную плиту 2, прижи.м 3, приводимый в движение через тол- катели 4, корпус 5, закрепленный на торцах прижима 3, гибочный пуансон 6 е вертикальными пазами /, закрепленный па верхней подвижной плите 2.
В корпусах 5 закреплепы пернендику.1яр- по к оси перемен1ения плиты 2 и при жима 3 направляюп1ие 8, в которых подвижно установлены съемники 9. На нижней неподвижной нлпте 1 закреплена гибочная матрипа 10.
На верхней подвижной плите смонтиро- ан фиксатор, выно,тненный в виде стерж 1Я И, проходяп1ий через вертикальное от верстие 12, вынолненное в съемнике 9. На плите 1 закренлен односторонние клинья 13 .У1ежду корпусами 5 и съемниками 9 расположены пружины 14 сжатия. В коргп - сах 5 закреплены П1тифты 17, входян1ис
4
О5 Oi 00 01
О
в пазы 18 съемников 9. Штифты 17 ограничивают перемендение съемников относительно корпусов 5.
Устройство работает следующим образом.
Формула изобретения Устройство для удаления деталей с р.або- чего органа штампа с неподвижной плитой, подвижной в вертикальном направлеУстроиствораоотает следующим ооразим.„„-„ „. прижимом расположенным межПри ходе плиты 2 вниз пуансон 6 в 5 « и явижно и подвижной плитами с
матрице 10 осуществляет гибку детали 15 и заготовки 16 на прижиме 3. При этом прижим 3 также перемещается вниз. Съемники 9 взаимодействуют с клиньями 13 и перемещаются к пуансону 6 и входят в пазы 7, сжимая пружины 14. Стержни 11 входят в отверстия 12 и фиксируют съемники 9.
При ходе плиты 2 с пуансоном 6 вверх
10
ду неподвижной и подвижной плитами с возможностью перемещения в вертикальном направлении, содержащее пружину сжатия, направляющие, расположенные перпендикулярно направлению перемещения прижима, съемник, подвижно установленный в направляющих с возможностью взаимодействия с рабочим органом, односторонний клин, смонтированный на неподвижной плите с возможностью взаимодействия со съемниПИ ходе плиты /. с НуаНииНиМ и ВОСрЛD OШ /....-
деталь 15 удерживается на пуансоне 6. 15 ком, и фиксатор съемника, выполненный в Прижим 3 -толкателями 4 перемещаетсявиде стержня, отличающееся тем, что.
также вверх, клинья 13 выходят из вза имодействия со съемниками 9. Затем прижим 3 останавливается, а плита 2 продолжает перемещаться вверх. Съемники 9 воздействуют на деталь 15 и удаляют 20 ее с пуансона 6. Затем стержни 11 выходят из отверстий 12 и съемники 9 под действием пружин 14 перемещаются в исходное положение.
с целью расщирения технологических возможностей путем удаления деталей различных габаритов, направляющие смонтированы на прижиме, фиксатор установлен вертикально на подвижной плите с возможностью взаимодействия со съемником, съемник расположен между прижимом и клином, пружина сжатия размещена между прижимом и съемником.
Формула изобретения Устройство для удаления деталей с р.або- чего органа штампа с неподвижной плитой, подвижной в вертикальном направле„„-„ „. прижимом расположенным меж„„-„ „. прижимом расположенным меж5 « и явижно и подвижной плитами с
0
ду неподвижной и подвижной плитами с возможностью перемещения в вертикальном направлении, содержащее пружину сжатия, направляющие, расположенные перпендикулярно направлению перемещения прижима, съемник, подвижно установленный в направляющих с возможностью взаимодействия с рабочим органом, односторонний клин, смонтированный на неподвижной плите с возможностью взаимодействия со съемниD OШ /....-
5 ком, и фиксатор съемника, выполненный в виде стержня, отличающееся тем, что.
ком, и фиксатор съемника, выполненный в виде стержня, отличающееся тем, что.
с целью расщирения технологических возможностей путем удаления деталей различных габаритов, направляющие смонтированы на прижиме, фиксатор установлен вертикально на подвижной плите с возможностью взаимодействия со съемником, съемник расположен между прижимом и клином, пружина сжатия размещена между прижимом и съемником.
| название | год | авторы | номер документа |
|---|---|---|---|
| Штамп совмещенного действия | 1980 |
|
SU902931A1 |
| Штамп для штамповки деталей из плоского материала | 1987 |
|
SU1426680A1 |
| Гибочный штамп | 1981 |
|
SU958009A1 |
| Штамп для гибки штучных заготовок из листа и проволоки | 1987 |
|
SU1433557A2 |
| СПОСОБ МНОГОПЕРЕХОДНОЙ ПОСЛЕДОВАТЕЛЬНОЙ ШТАМПОВКИ В ЛЕНТОЧНО-ПОЛОСОВОЙ ЗАГОТОВКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2591023C2 |
| Гибочный штамп | 1982 |
|
SU1110514A1 |
| Демпфер для подающей каретки штампа | 2020 |
|
RU2756457C1 |
| Штамп совмещенного действия | 1980 |
|
SU871913A1 |
| Штамп для штамповки изделий из плоских заготовок | 1987 |
|
SU1447479A1 |
| Штамп совмещенного действия для гибки и обрезки деталей | 1980 |
|
SU931261A1 |

Изобретение относится к .холодной обработке метал.-юв дав. и может быть ис11().-|ыпнапо Д.1Я уда.кшия деталей с рабочего органа нтампа. Цель изобретения - расширение технологически.х возможностей путем удаления деталей разл.ичны.х габаритов. Детали удаляются с рабочего органа, в частности с гибочного пуансона, съемниками. Каждый из съемников иодвижно установлен в направляющих, закрепленны.х на прижиме перпендикулярно направлению его перемещения. Прижим расположен между неподвижной и подвижной плитами с возможностью перемеп1ения в вертикальном направлении. Съемник приводится в движение от одностороннего клина, закрепленного на неподвижной плите. Съемник расположен между прижимом и клином. .Между прижимом и с ьемником расположена нружина сжатия. На подвижной п.-ште смонтирован фиксатор. выполненн1 п в виде стержня, закрепленного вертика/п-но с возможностью взаимодействия со съемником 3 ил. S
1
Составитель И. Ментягова
Редактор Г. ВолковаТехред И. ВересКорректор И. Муска
Заказ 1095/10Тираж 694Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ CCCl
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-издательский комбинат «Патент, г. Ужгород, y,-i. Гагарина, 101
фие.З
| МЕХАНИЗМ ДЛЯ УДАЛЕНИЯ ДЕТАЛЕЙ ИЗ ЗОНЫ ШТАМПОВКИ | 0 |
|
SU244282A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Авторское свидете,-|ьство СССР № 361005, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Патент ФРГ ,Yo 971134, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Авторское свидетельство СССР ,М 305946, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
