Изобретение относится к оборудованию для механизации погрузочно-раз- грузочных работ, а именно к устройствам дпя укладки и вьщачи плоских изделий из стопы.
Цель изобретения - повьшение удобства эксплуатации путем обеспечения периориентадии изделий в процессе их передачи..
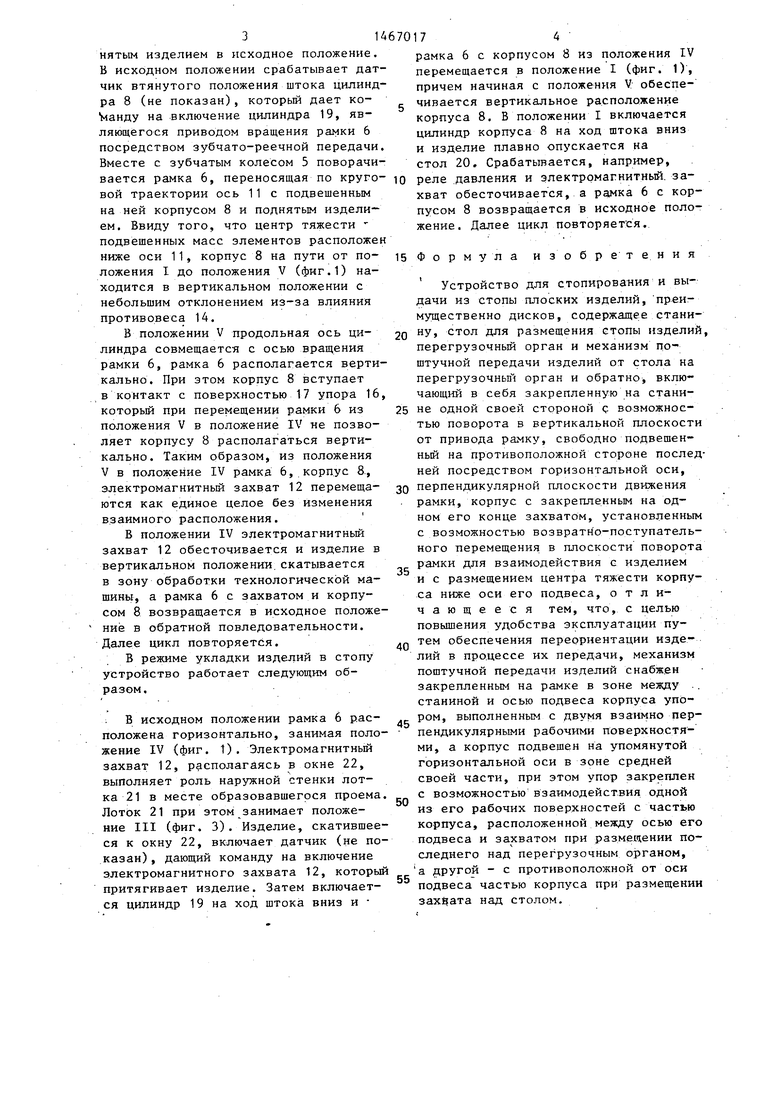
На фиг. 1 изображено устройство с тремя положениями механизма поштучной передачи изделий, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг.З вид Б на.фиг. 1 с вариантами расположения лотков в зависимости от работы устройства (отвода или подачи изделий) ; на фиг. 4 - вид Б на фиг. 1; на фиг. 5 - вид Г на фиг. 4.
УстройсТ во состоит из станины 1, на стойках 2 которой на поворотной горизонтальной оси 3 жестко закреплен механизм поштучной передачи изделий, включающий зубчатое колесо 5 и рамку 6, выполненную в виде скобы, открытой со стороны расположения хомута 7 с корпусом 8, выполненным в виде цилиндра, который размещен между сторонами 9 и 10 рамки 6 на оси 11. Корпус 8 снабжен электромагнитным захватом 12, прикрепленным к его штоку. На плите 13 размещены датчики изделия и втянутого положения штока корпуса 8 (не показаны) и противовес .14, предназначенный для создания мини- мального крутящего момента относительно оси 11 крепления корпуса 8 с тем, чтобы гарантированно обеспечивалось вертикальное расположение кор
пуса В посредством поверхности 15 упора 16, имеющего еще одну поверхность 17, расположенную перпендикулярно первой.
Зубчатое колесо 5 находится в зацеплении с рейкой 18, нижний конец которой соединен со штоком цилиндра 19, смонтированного на станине 1. Рядом со станиной 1 размещен стол 20 для стопы изделий, геометрическая ось которого в положении I (фиг.1) совпадает с осью корпуса 8. По другую сторону от оси 3 вращения рамки 6 на станине 1 размещен перегрузочньш орган .4 виде наклонного лотка 21, который может находиться в двух положениях II и III (фиг.З).
Положение II (фиг. 3) лоток 21 занимает при выдаче изделий из стопы, 0 а положение III - при укладке изделий . в стопу. С наружной стороны лотка выполнено окно 22 для захода или выхода из него изделий, Дпя обеспече-. ния свободного скатывания изделий по
5
30
rtfL-fl v, -i,
наклонному лотку 21 при горизонтальном расположении рамки в положении IV (фиг. 1) на боковой стороне 9 выполнен поперечный паз 23.
Устройство работает следующим образом.
i i.
В исходном положении рамка 6 расположена горизонтально, занимая положение 1 (фиг. 1). Включают цилиндр корпуса 8 на ход штока вниз. Электро- 35 магнитный захват 12 перемещается вниз до тех nopi пока не сработает датчик - наличия изделия (не показан), дающий команду на включение электромагнитного захвата 12 и возврат его с под314
нятым изделием в исходное положение. В исходном положении срабатывает датчик втянутого положения штока цилиндра 8 (не показан), который дает ко- манду на включение цилиндра 19, являющегося приводом вращения рамки 6 посредством зубчато-реечной передачи. Вместе с зубчатым колесом 5 поворачивается рамка 6, переносящая по круго- вой траектории ось 11 с подвешенным на ней корпусом 8 и поднятым изделием. Ввиду того, что центр тяжести подвешенных масс элементов расположен ниже оси 11, корпус 8 на пути от по- ложения I до положения V (фиг.1) находится в вертикальном положении с небольшим отклонением из-за влияния противовеса 14.
В положении V продольная ось ци- линдра совмещается с осью вращения рамки 6, рамка 6 располагается вертикально. При этом корпус 8 вступает в контакт с поверхностью 17 упора 16 который при перемещении рамки 6 из положения V в положение IV не позволяет корпусу 8 располагаться вертикально. Таким образом, из положения V в положение IV рамка 6, корпус В., электромагнитный захват 12 перемеща- ются как единое целое без изменения взаимного расположения.
В положении IV электромагнитный захват 12 обесточивается и изделие в вертикальном положении.скатывается в зону обработки технологической машины, а рамка 6 с захватом и корпусом 8 возвращается в исходное положение в обратной повледовательности. Далее цикл повторяется.
В режиме укладки изделий в стопу устройство работает следующим образом.
В исходном положении рамка 6 расположена горизонтально, занимая положение IV (фиг. 1). Электромагнитный захват 12, располагаясь в окне 22, выполняет роль наружной стенки лотка 21 в месте образовавшегося проема. Лоток 21 при этом занимает положение III (фиг. 3). Изделие, скатившееся к окну 22, включает датчик (не показан) , дающий команду на включение электромагнитного захвата 12, который притягивает изделие. Затем включается цилиндр 19 на ход штока вниз и
5
0 5 о
о
5
5
174
рамка 6 с корпусом 8 из положения IV перемещается в положение I (фиг. 1), причем начиная с положения V обеспечивается вертикальное расположение корпуса 8. В положении I включается цилиндр корпуса 8 на ход штока вниз и изделие плавно опускается на стол 20, Срабатывается, например, реле давления и электромагнитный, захват обесточивается, а рдмка 6 с корпусом 8 возвращается в исходное положение. Далее цикл повторяется.
Формула изобретения
Устройство для стопирования и выдачи из стопы плоских изделий, преимущественно дисков, содержащее станину, стол для размещения стопы изделий, перегрузочный орган и механизм поштучной передачи изделий от стола на перегрузочньй орган и обратно, включающий в себя закрепленную на станине одной своей стороной с возможностью поворота в вертикальной плоскости от привода рамку, свободно подвешенный на противоположной стороне последней посредством горизонтальной оси, перпендикулярной плоскости движения рамки, корпус с закрепленным на одном его конце захватом, установленным с возможностью возвратМо-поступатель- ного перемещения в плоскости поворота рамки для взаимодействия с изделием и с размещением центра тяжести корпуса ниже оси его подвеса, отличающееся тем, что, с целью повышения удобства эксплуатации путем обеспечения переориентации изделий в про.цессе их передачи, механизм поштучной передачи изделий снабжен закрепленным на рамке в зоне между станиной и осью подвеса корпуса упором, выполненным с двумя взаимно перпендикулярными рабочими поверхностями, а корпус подвешен на упомянутой горизонтальной оси в зоне средней своей части, при этом упор закреплен с возможностью взаимодействия одной из его рабочих поверхностей с частью корпуса, расположенной между осью его подвеса и захватом при размещении последнего над перегрузочным органом, а другой - с противоположной от оси подвеса частью корпуса при размещении захвата над столом.
Вид В Фие.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Установка для многономенклатурной штамповки полосового материала различной толщины | 1982 |
|
SU1069908A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Роторно-конвейерная машина с вертикальной осью для листовой штамповки | 1986 |
|
SU1428562A1 |
| Робототехнический комплекс для штамповки деталей из штучных заготовок | 1987 |
|
SU1600895A1 |
| Робототехнологический комплекс для сборки | 1990 |
|
SU1782203A3 |
| Установка для обработки изделий и устройство для закалки | 1983 |
|
SU1209722A1 |
| Устройство для отделения листовых заготовок от стопы | 1987 |
|
SU1426682A1 |
| Полуавтоматическая линия для сборки,преимущественно,петель | 1983 |
|
SU1088912A1 |
| Устройство для поштучной выдачи плоских заготовок из стопы | 1981 |
|
SU956102A1 |

Изобретение относится к оборудованию для механизации погрузочно-раз- грузочных работ, а именно к устройствам для укладки и выдачи плоских изделий из стопы, и позволяет повысить удобство эксплуатации путем обеспечения переориентации изделий в процессе их передачи. Устройство состоит из станины 1, на которой закреплена по
Физ.З
Фие.
ВидГ
Фиг. 5
| Патент США № 3776393, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
