Изобретение относится к обработ- , ке металлов давлением, в частности к изготовлению цилиндрических пружин горячей навивкой из прутков, и может быть использовано, например, в автомобильном и тракторном машино-
строении.
Цель изобретения - повьшение надежности и расширение технологических возможностей станка.
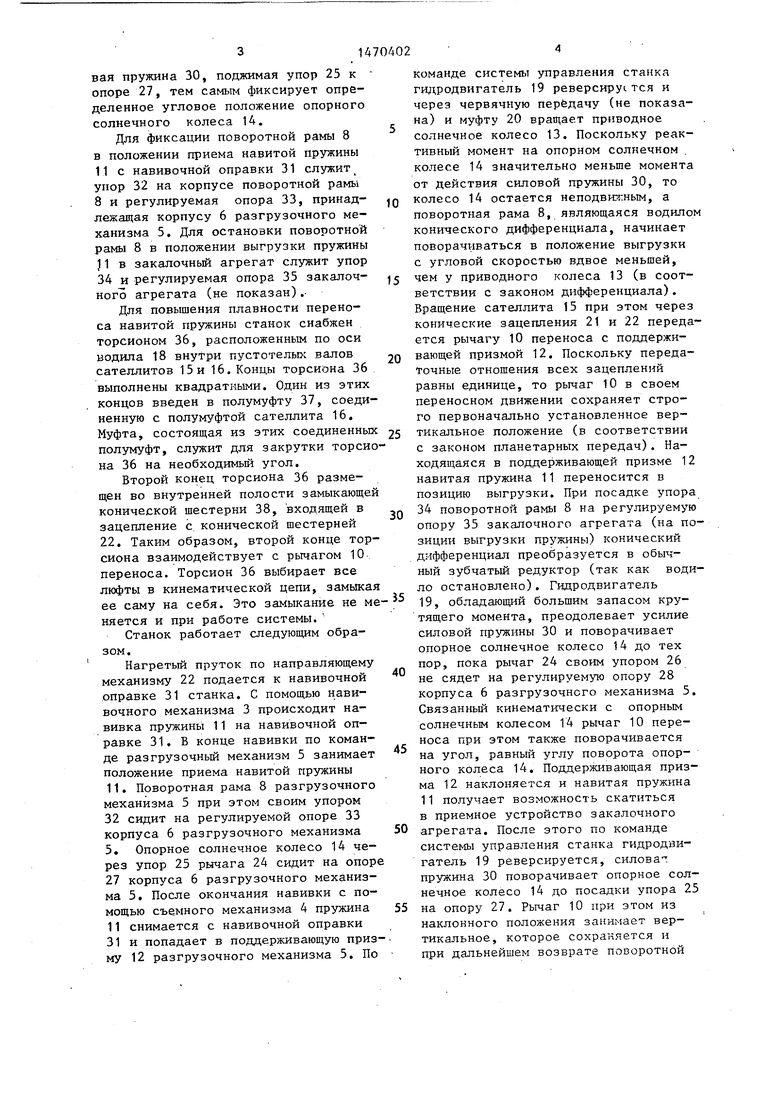
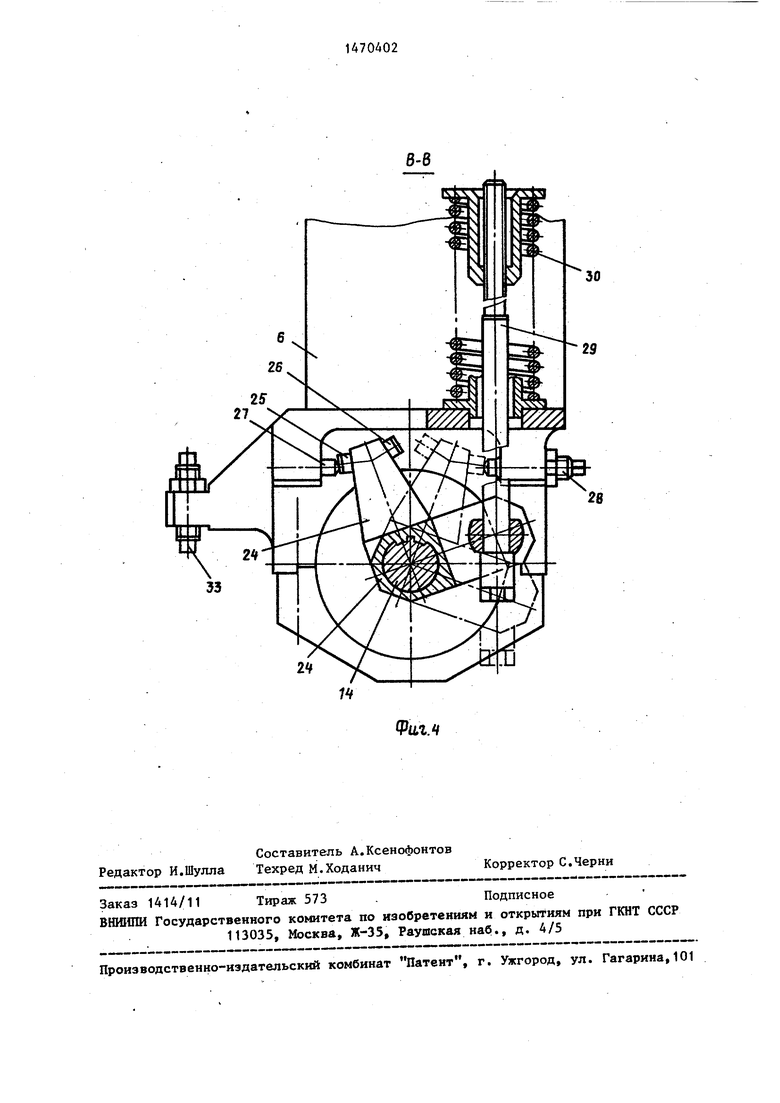
На фиг.1 изображен предлагаемьй станок, общий вид; на фиг.2 - вид А на фиг.1; на фиг.З - разрез Б-Б на фиг.2; на фиг.4 - разрез В-В на
фиг.З.
Станок содержит установленные на станине 1 направляющий механизм 2, навивочный механизм 3 с приводом (не показан), механизм 4 съема и разгруч зочный механизм 5. На корпусе 6 разгрузочного механизма 5 шарнирно посредством подшипников 7 качения закреплена поворотная рама 8. Рама 8 шарнирно посредством подшипников 9 качения связана с рычагом 10 перено- са навитой пружины 11. На рычаге 10 закреплена поддерживающая призма 12. станок снабжен механизмом коничеСКОРО дифференциала, состоящим из приводного 13 и опорного 14 солнечных колес и сателлитов 15 и 16. Сателлиты 15 и 16 установлены на под- шипниках 17 качения в корпусе, который является одновременно водилом
18 конического дифференциала и часть поворотной рамы 8.
Солнечные колеса 13 и 14 расположены соосно с шарниром (подшипники 7 качения), посредством которого поворотная рама 8 соединена с корпусом 6 разгрузочного устройства 5. Качание поворотной раме 8 передается от гидродвигателя 19 через червячную передачу (не показана), муфту 20 и механизм конического дифференциала - солнечные колеса 13 и 14, сателлиты 15 и 16 и водило 18.
Сателлит 15 выполнен в виде пустотелого вала-шестерни и кинематически связан с рычагом 10 переноса, на другом конце пустотелого вала выполнена коническая шестерня 21, которая входит в зацепление с конической шестерней 22, выполненной заодно с осью рычага Ю переноса. Сателлит 16 выполнен также в виде пустотелого вала-шестерни. Конец вала вы- полйен в виде полумуфты.
Опорное солнечное колесо 14 установлено в корпусе поворотной рамы 8 на подшипниках 23 качения и несет на своем шлицевом конце двуплечий рычаг 24о На одном плече рычага 24 выполнены упоры 25 и 26, взаимодействующие с опорой 27 и регулируемой опорой 28 корпуса 6 разгрузочного механизма 5. На второе плечо рычага ,24 через тягу 29 воздействует силоая пружина 30, поджимая упор 25 к поре 27, тем самым фиксирует опрееленное угловое положение опорного олнечного колеса 14.
Для фиксации поворотной рамы 8 в положении приема навитой пружины 11 с навивочной оправки 31 служит упор 32 на корпусе поворотной рамь 8 и регулируемая опора 33, принад- Q лежащая корпусу 6 разгрузочного механизма 5. Для остановки поворотной рамы 8 в положении выгрузки пружины J1 в закалочньй агрегат служит упор 34 и регулируемая опора 35 закалоч- j кого агрегата (не показан) .
Для повышения плавности переноса навитой пружины станок снабжен торсионом 36, расположенным по оси водила 18 внутри пустотельк валов 20 сателлитов 15 и 16. Концы торсиона 36 выполнены квадратными. Один из этих концов введен в полумуфту 37, соединенную с полумуфтой сателлита 16. Муфта, состоящая из этих соединенных 25 полумуфт, служит для закрутки торсиона 36 на необходимый угол.
Второй конец торсиона 36 размещен во внутренней полости замыкающей конической шестерни 38, входящей в Q зацепление с конической шестерней 22. Таким образом, второй конце торсиона взаимодействует с рычагом Ю переноса. Торсион 36 выбирает все люфты в кинематической цепи, замыкая ее саму на себя. Это замыкание не ме няется и при работе системы.
Станок работает следующим образом.
Нагретый пруток по направляющему механизму 22 подается к навивочной оправке 31 станка. С помощью нави- вочного механизма 3 происходит навивка пружины 11 на навивочной оправке 31. В конце навивки по команде разгрузочный механизм 5 занимает положение приема навитой пружины 11. Поворотная рама 8 разгрузочного механизма 5 при этом своим упором 32 сидит на регулируемой опоре 33 корпуса 6 разгрузочного механизма 5. Опорное солнечное колесо 14 через упор 25 рычага 24 сидит на опоре 27 корпуса 6 разгрузочного механизма 5. После окончания навивки с помощью съемного механизма 4 пружина 55 11 снимается с навивочной оправки 31 и попадает в поддерживающую приз- му 12 разгрузочного механизма 5. По
J5
40
45
50
Q j
20 25
Q
55
J5
40
45
50
команде системьт управления станка гидродвигатель 19 реверсируется и через червячную передачу (не показана) и муфту 20 вращает приводное солнечное колесо 13. Поскольку реактивный момент на опорном солнечном . колесе 14 значительно меньше момента от действия силовой пружины 30, то колесо 14 остается неподвиг -ным, а поворотная рама 8, являющаяся водилом конргческого дифференциала, начинает поворачиваться в положение выгрузки с угловой скоростью вдвое меньшей, чем у приводного колеса 13 (в соответствии с законом дифференциала). Вращение сателлита 15 при этом через конические зацепления 21 и 22 передается рычагу 10 переноса с поддерживающей призмой 12. Поскольку передаточные отношения всех зацеплений равны единице, то рычаг 10 в своем переносном движении сохраняет строго первоначально установленное вертикальное положение (в соответствии с законом планетарных передач). Находящаяся в поддерживающей призме 12 навитая пружина 11 переносится в позицию выгрузки. При посадке упора 34 поворотной рамы 8 на регулируемую опору 35 закалочного агрегата (на позиции выгрузки пружины) конический дифференциал преобразуется в обычный зубчатый редуктор (так как водило остановлено). Гидродвигатель 19, обладающий большим запасом крутящего момента, преодолевает усилие силовой пружины 30 и поворачивает опорное солнечное колесо 14 до тех пор, пока рычаг 24 своим упором 26 не сядет на регулируемую опору 28 корпуса 6 разгрузочного механизма 5. Связанный кинематически с опорным солнечным колесом 14 рычаг 10 переноса при этом также поворачивается на угол, равный углу поворота опорного колеса 14. Поддерживающая призма 12 наклоняется и навитая пружина 11 получает возможность скатиться в приемное устройство закалочного агрегата. После этого по команде системы управления станка гидродвигатель 19 реверсируется, силова-г пружина 30 поворачивает опорное солнечное колесо 14 до посадки упора 25 на опору 27. Рычаг 10 при этом из наклонного положения занимает вертикальное, которое сохраняется и при дальнейшем возврате поворотной
рамы 8 в исходное положениео В силу наличия системы выборки люфтов в кинематической цепи движение поворотной рамы происходит плавно, что ис- ключает потерю навитой пружины из поддерживающей призмы 12 о Цикл работы станка завершается.
Использование предлагаемого станка дпя изготовления пружин в соста- ве поточных машинных линий позволяет повысить их надежность и расширить технологические возможности. Формула изобретения
1„ Станок для изготовления пружин преимущественно горячей навивкой, содержащий размещенные на общей станине, направляющий и навивочный механизмы, механизм съема, а также приводной разгрузочный механизм,включающий корпус, шарнирно соединенную с корпусом поворотную раму, шарнирно связанный с поворотной рамой рычаг переноса .навитой пружины, кинемати- ческий связанный через оси шарниров с корпусом, отличающийся
тем, что, с целью повьш1ения надежности и расширения технологических возможностей станка, он снабжен коническим дифференциалом, водило которого жестко связано с поворотной рамой, а солнечные колеса расположены соосно с шарниром, посредством которого поворотная рама соединена с корпусом разгрузочного механизма, при этом одно из солнечных колес связано с приводом разгрузочного механизма, другое установлено с возможностью ограниченного угла поворота относительно корпуса и подпружинено, а один из сателлитов дифференциала кинематически связан с рычагом переноса навитой пружины.
2. Станок ПОП.1, отличающийся тем, что, с целью повышения надежности за счет выборки люфтов в соединениях, он снабжен торсионом, расположенным по оси водила и взаимодействующим одним концом с другим сателлитом дифференциала, а другим - с рычагом переноса навитой пружины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ДЛЯ НАВИВКИ СПИРАЛЬНЫХ ПРУЖИН | 1969 |
|
SU250106A1 |
| Навивочное устройство автомата для изготовления спиральных пружин | 1977 |
|
SU657894A1 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ ЭЛЕМЕНТА АРМАТУРНОГО КАРКАСА ЗАДАННОГО ПРОФИЛЯ | 2010 |
|
RU2445184C1 |
| Станок для горячей навивки пружин | 1989 |
|
SU1667999A1 |
| Станок для изготовления спиральных пружин кручения | 1957 |
|
SU124410A1 |
| Способ навивки бесконечных многопроволочных спиралей и станок для его осуществления | 1986 |
|
SU1493368A1 |
| Устройство для изготовления пружин | 1986 |
|
SU1359047A1 |
| Устройство для изготовления пружин | 1988 |
|
SU1563821A2 |
| Станок для горячей навивки пружин | 1990 |
|
SU1726098A2 |
| Автомат для изготовления плоских спиральных пружин | 1975 |
|
SU536871A1 |
Изобретение относится к оборудованию для изготовления цилиндрических пружин горячей навивкой и позволяет повысить надежность и расширить технологические возможности станка. Станок содержит установленные на станине направляющее устройство, навивочное устройство, съемное и разгрузочное устройства. На корпусе 6 разгрузочного устройства шарнирно закреплена поворотная рама 8, связанная шарнирно с рычагом переноса 10. Станок снабжен механизмом конического дифференциала, состоящим из приводного 13 и опорного 14 солнечных колес и сателлитов 15 и 16. Водило 18 дифференциала является частью поворотной рамы 8. Качание поворотной рамы 8 передается от гидродвигателя через механизм дифференциала. Силовая пружина 30 фиксирует определенное положение опорного солнечного колеса 14. Станок снабжен торсионом 36, расположенным по оси водила. Нагретый пруток по направляющему устройству подается к навивочной оправке, где с помощью навивочного устройства происходит навивка пружины 11. По окончании навивки съемное устройство снимает пружину 11 с оправки. Пружина 11 попадает в поддерживающую призму 12 разгрузочного устройства. Поворотный рычаг 8 поворачивается в положение выгрузки. Рычаг 10 сохраняет строго первоначально установленное вертикальное положение. После поворота в позицию выгрузки поддерживающая призма 12 наклоняется и навитая пружина 11 скатывается в приемное устройство закалочного агрегата. Поворотный рычаг 8 возвращается в исходное положение. Цикл работы станка завершен. 1 з.п. ф-лы, 4 ил.
8и.5А
30
29
Фиг.
| Шнейберг В.М., Акаро И.Л | |||
| Куэ- нечно-штамповочное производство Волжского автомобильного завода | |||
| - М.: Машиностроение, 1977, с.235, 236 и 239-249. |
