ШиеЛ
1
Изобретение относится к транспортным средствам, имеющим устройства для погрузки и разгрузки контейнеров.
Цель изобретения - повышение грузоподъемности.
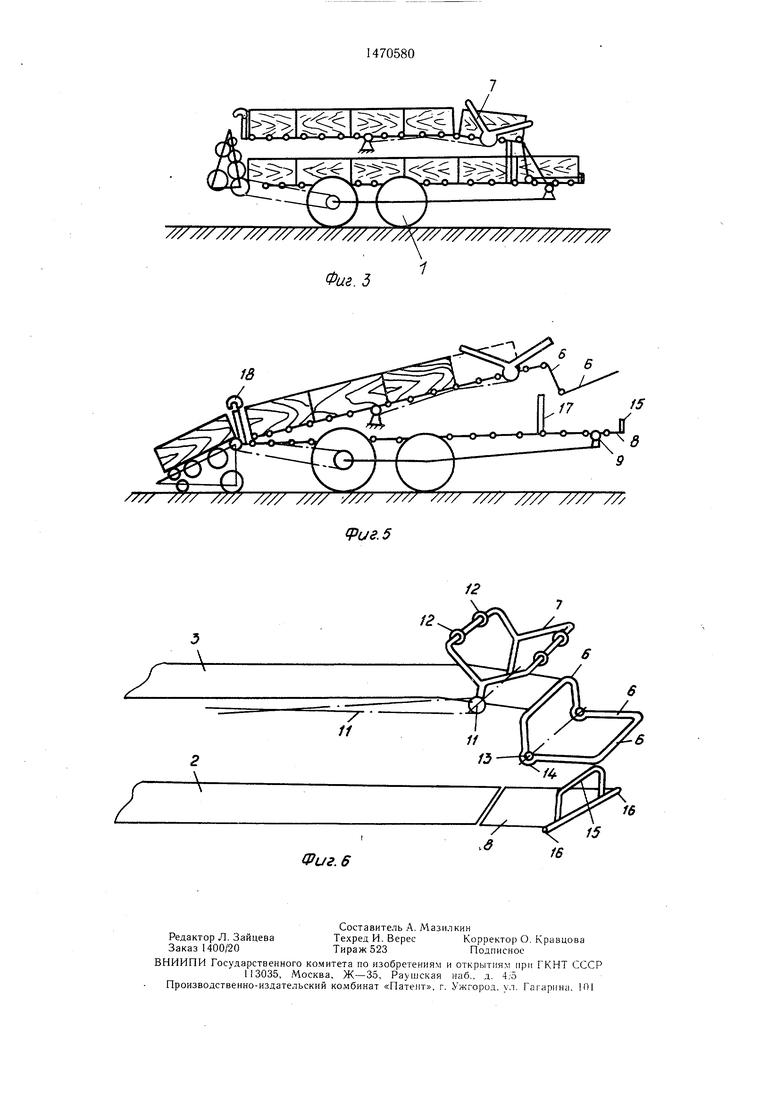
На фиг. 1 изображена двухярусная платформа в положении погрузки контейнеров на верхний рольганг; на фиг. 2 - то же, в положении погрузки нижнего рольганга; на фиг. 3 - транспортное положение; на фиг. 4 - то же, в положении разгрузки одного переднего контейнера с верхнего рольганга; на фиг. 5 - то же, в положении разгрузки остальных контейнеров с верхнего рольганга; на фиг. б - устройство и расположение отогнутой части верхнего рольганга, ограничительного приспособления, нажимных рычагов и разгрузочной площадки, аксонометрическая проекция.
Транспортное средство включает шасси 1, на котором установлены наклонная грузовая платформа 2 нижнего яруса (нижний рольганг), выполненная в виде рольганга, и качающаяся грузовая платформа 3 (верхний рольганг), установленная над нижним рольгангом с осью 4 качания. Верхний рольганг имеет отогнутую часть 5, на которой установлены нажимные рычаги 6 и ограничительное приспособление 7. К верхней части нижнего рольганга примыкает и является как бы ее продолжением качающаяся разгрузочная площадка 8 с осью 9 качания. Оси 4 и 9 качания смещены относительно середин грузовой платформы 3 верхнего яруса и разгрузочной площадки 8 на 1/4 часть длины обрабатываемого контейнера.
Рамка 7 укреплена на оси 10, которая связана с осью 4, например, при помощи ременной или цепной передачи 11. Рамка 7 оборудована также роликами 12, служащими для уменьшения сопротивления при соприкосновении со стенками контейнеров. Нажимные рычаги 6 выполнены в виде двухплечей системы и скреплены цилиндрическим шарниром 13 с пружиной 14 возврата в исходное положение. На качающейся разгрузочной площадке 8 нижнего яруса укреплен упор 15, предохраняющий контейнер от сползания контейнера и опоры 16, которые контактируются с рычагами 6.
Грузовая платформа 2 нижнего яруса в своей передней части имеет стойки 17 с фиксаторами и грузовая платформа 3 в задней части имеет приспособление 18 для ограничения перемещения контейнера. К грузовой платформе 2 подвещен погрузочно- разгрузочный конвейер 19 с помощью горизонтальной оси 20, т. е. чтобы конвейер 19 мог поворачиваться в продольной вертикальной плоскости. Конвейер 19 включает валки 21 нижнего горизонтального рольганга и валки 22 верхнего наклонного рольганга. Валки 21 и 22 выполнены разного диаметра
0
5
0
5
0
5
0
5
0
5
и их оси вращения закреплены с возможностью перемещения по вертикали, при этом каждый валок 21 подпружинен вверх и имеет возможность контактировать с двумя валками 22. Валки 21 при отсутствии контейнера на конвейер 19 не касаются поверхности земли. Ось 20 кинематически связана с осью колеса шасси 1, имеющей муфту 23 сцепления. Контейнеры, предназначенные для работы с предлагаемым транспортным средством, имеют зазор между днищем контейнера и поверхностью земли, достаточный для прохода первого валка 22.
Погрузка-и выгрузка контейнеров производится только при поступательном движении транспортного средства: погрузка производится при движении назад, выгрузка - при движении вперед.
Устройство работает следующим образом.
Перед погрузкой контейнеры должны быть расположены на одной прямой, т. е., чтобы зазоры между поддоном контейнера и поверхностью земли были обращены к транспортному средству. При этом погрузочно-разгрузочный конвейер 19 откинут в рабочее положение, а грузовая платформа 3 находится в откинутом положении (фиг. 1) для погрузки.
Транспортное средство подается задним ходом, при этом клинообразный конвейер 19 входит в зазор контейнера и при прикосновении первого валка 22 с поддоном он начинает вращаться, одновременно под действием массы и движения транспортного средства валки 22 вместе с валками 21 опускаются до контакта с поверхностью земли. Нижние валки 21 выполняют роль ведущих, а верхние валки 22 - ведомых, которые своим вращением как бы «натаскивают на себя контейнер. По мере движения конвейера 19 контейнер движется по ведомым валкам 22, при этом последовательно своей массой «включая действие ведущих 21 и ведомых 22 валков. При сходе контейнера с ведомого валка 22 последний вместе с ведущим валком 21 приподнимается под действием пружины и валок 21 теряет контакт с поверхностью земли, а валки перестают вращаться.
Контейнер, поднявшись по валкам 22, попадает на рольганг грузовой платформы 3, дальнейшее движение контейнера по которому будет осуществляться благодаря движению следующего контейнера и так до заполнения всей грузовой платформы 2 верхнего яруса, при этом первый контейнер попадает на отогнутую часть этой платформы и упирается в передний поперечный элемент рамки 7.
Благодаря отогнутой части между первым и последующим контейнерами образуется клинообразный просвет.
Такой просвет образуется между последним контейнером, находящимся на этой
ничительное приспособление 18 в просвет между контейнерами и освобождает верхнюю грузовую платформу 3 от фиксатора (не показан). Благодаря тому, что ось качагрузовой площадке, и контейнером, находя-положение для разгрузки. Обслуживающий щимся на погрузочно-разгрузочном конвейе-рабочий зафиксирует это положение и отки- ре 19. Эти просветы необходимы для про-нет ограничительное приспособление 18. Раз- хода в них элемента рамки 7 и прис-грузка верхней площадки 3 бужет произ- пособления 18. По окончании погрузки на водиться при переднем ходе транспортного верхней грузовой платформе 3 вв 9ДИ гся огра-средства. Одновременно с этим процессом
нажимные рычаги 6 перестанут контактировать с опорами 16. Разгрузочная пло- цдадка 8 под действием суммарной массы
.v.ii;. i viuiw/лик , -и-- i ana-контейнера и самой площадки (из-за сменяя смещена относительно середины плат- Ющения оси 9 качания) встанет в исходное формы 3, ее правая сторона тяжелее левойположение и станет частью грузовой пло- и под действием образовавщегося крутяще-щадки 3.
Г9 момента платформа 3 начинает враще-Единственный контейнер, находящийся на ние вокруг оси 4, так как оси 4 и 10 име-разгрузочной плоп:.адке 8, скатится по нак- ют между собой связи, начинает вращение |5лонному рольгангу, при этом надо задер- рамка 7, при этом ее задний попереч-жать на какое-то время вращение верхней ный элемент входит в просвет междуплатформы 3 в транспортном положении контейнерами, тем самым предохраняетна стойке 17 контейнеры от сползания. При достижении платформой 3 стойки 17 положение После окончания разгрузки транспортное площадки фиксируется в транспортном по- 20средство может перемещаться не поднимая ложении (фиг. 2). При заднем ходе транс-погрузочно-разгрузочный конвейер 19 в портного средства производится погрузка грузовой платформы 2 нижнего яруса. После окончания погрузки обслуживающий рабочий включает муфту 23 сцепления, тем са- 25
транспортное положение, так как благодаря пружинам ведущие валки 21 не контактируют с поверхностью.
мым погрузочно-разгрузочный конвейер 19 поднимается в транспортное положение и стопорится, при этом стопор выводит из зацепления муфту 23 сцепления. Транспортное средство готово к транспортировке
Формула изобретения
I. Транспортное средство для перевозки контейнеров, содержащее смонтированный
,, Лч -----гшарнирно на одном конце рамы щасси с
(фиг. 3) т. е. от про дольного смещения кон- 30 возможностью поворота в продольной верти- теинеров на нижней грузовой платформе 2кальной плоскости погрузочно-разгрузочный
предохраняют упор 9 и конвейер 19, аконвейер, наклонную в продольной вертиот поперечного смещения - буртики самихкальной плоскости в сторону погрузочноконтеинеров, упирающиеся с. двух сторон вразгрузочного конвейера платформу с рольторцы валков рольг анга.,ангом, отличающееся тем, что, с целью
Перед погрузкой обслуживающий рабо- 35 повышения грузоподъемности, оно с набжено чии освобождает стопор погрузочно-разгру- зочного конвейера 19, который под действием собственной масы встанет в рабочее положение. Конвейеры, расположенные на наклонном рольганге, скатятся по его валкам.40
Для разгрузки верхней грузовой платформы 3 обслуживающий рабочий освобождает фиксатор в стойке 17, при этом
т F Р щсниеpi iiiuri ИЛИ 1 juuiUDL, isuiuuDiH ныиилнен с осогвокруг оси 4 под действием разницы мае- 45 нутым вниз участком для введения одного сы контейнеров, находящихся на ней. Одно-поперечного элемента рамки - разделителя
контейнеров, расположенного ближе к погру- зочно-разгрузочному конвейеру, между крайним размещенным на отогнутом участке
„ r---rj---контейнером и смежн.ым с ним при подъенои площадки 8, тем самым заставляя 50 ме над контейнером другого поперечного разгрузочную площадку 8 встать в положе-эле мента рамки - ограничителя перемещеНИИ крайнего контейнера, причем рамка кинематически связана с рамой шасси, на другом конце которой шарнирно с возможггл оА , ОСТЬЮ поворота в продольной вертикальной
грузочную площадку 8 и дойдет до упора 15.55 плоскости закреплена средней частью пло.РЙ;;.„Т « момента платформа 3 подщадка с рольгангом для одного контейдеиствием более тяжелой левой части„ера, один конец которой расположен с
начнет вращение вокруг оси 4 и встанет ввозможностью совмещения с наклонной
поворотной платформой с рольгангом, средней частью шарнирно закрепленной на щасси над наклонной платформой с возможностью поворота в продольной вертикальной плоскости для совмещения одного ее конца с погрузочно-разгрузочным конвейером, рамкой, шарнирно закрепленной средними ч-астями ее продольных .элементов на боковых сторонах другого конца поворотной платформы, который выполнен с отогвременно рамка 7 освобождает от стопо- рения контейнер, расположенный на согнутой части 5, а нажимные рычаги 6 входят в контакт с опорами 16 разгрузочJ, J „ .....v ...или- i., J LJV,lCJil- и 1 IVJi/l J./T t
ние разгрузки. На этот момент отогнутая часть 5 и разгрузочная площадка 3 стано-вятся как бы одним рольгангом, ло которому один контейнер скатится на разЕдинственный контейнер, находящийся на разгрузочной плоп:.адке 8, скатится по нак- лонному рольгангу, при этом надо задер- жать на какое-то время вращение верхней платформы 3 в транспортном положении на стойке 17 После окончания разгрузки транспортное средство может перемещаться не поднимая погрузочно-разгрузочный конвейер 19 в
транспортное положение, так как благодаря пружинам ведущие валки 21 не контактируют с поверхностью.
енный контейнер, наход ой плоп:.адке 8, скатит ольгангу, при этом на акое-то время вращени 3 в транспортном 17 кончания разгрузки тр ожет перемещаться не -разгрузочный конвей
Формула изобретения
повышения грузоподъемности, оно с набжено
pi iiiuri ИЛИ 1 juuiUDL, isuiuuDiH ныиилнен с осог нутым вниз участком для введения одного поперечного элемента рамки - разделителя
поворотной платформой с рольгангом, средней частью шарнирно закрепленной на щасси над наклонной платформой с возможностью поворота в продольной вертикальной плоскости для совмещения одного ее конца с погрузочно-разгрузочным конвейером, рамкой, шарнирно закрепленной средними ч-астями ее продольных .элементов на боковых сторонах другого конца поворотной платформы, который выполнен с отог1470580
56 .
платформой для скатывания контейнера сдлины контейнера, а шарнир крепления плоплощадки на наклонную платформу и сщадки - в противоположную сторону,
другим концом поворотной платформы для2. Средство по п. 1, отличающееся
скатывания контейнера с последней на пло-тем, что длина отогнутого участка и длищадку, а на другом конце площадкиj площадки равны длине контейнера, а
закреплен упор для контейнера и опорыдлина поворотной платформы кратна длине
для взаимодействия с нажимными рычагами,контейнера.
которые закреплены на поворотной плат-3. Средство по п. 1, отличающееся форме, причем последняя снабжена фикса-тем, что ось шарнира поворотной плат- торами ее горизонтального и наклонного вформы смещена на четверть длины кон- сторону погрузочно-разгрузочного конвейератейнера.
положений и приспособлением для ограни-4. Средство по п. 1, отличающееся
чения перемещения контейнера на одном еетем, что кинематическая связь рамки с раконце, при этом шарнир крепления пово-мой выполнена в виде передачи с гибким
ротной платформы смещен относительноэлементом и соосным с осью шарнира
центра в сторону погрузочно-разгрузочного с поворотной платформы приводным элеменконвейера на величину не более половинытом.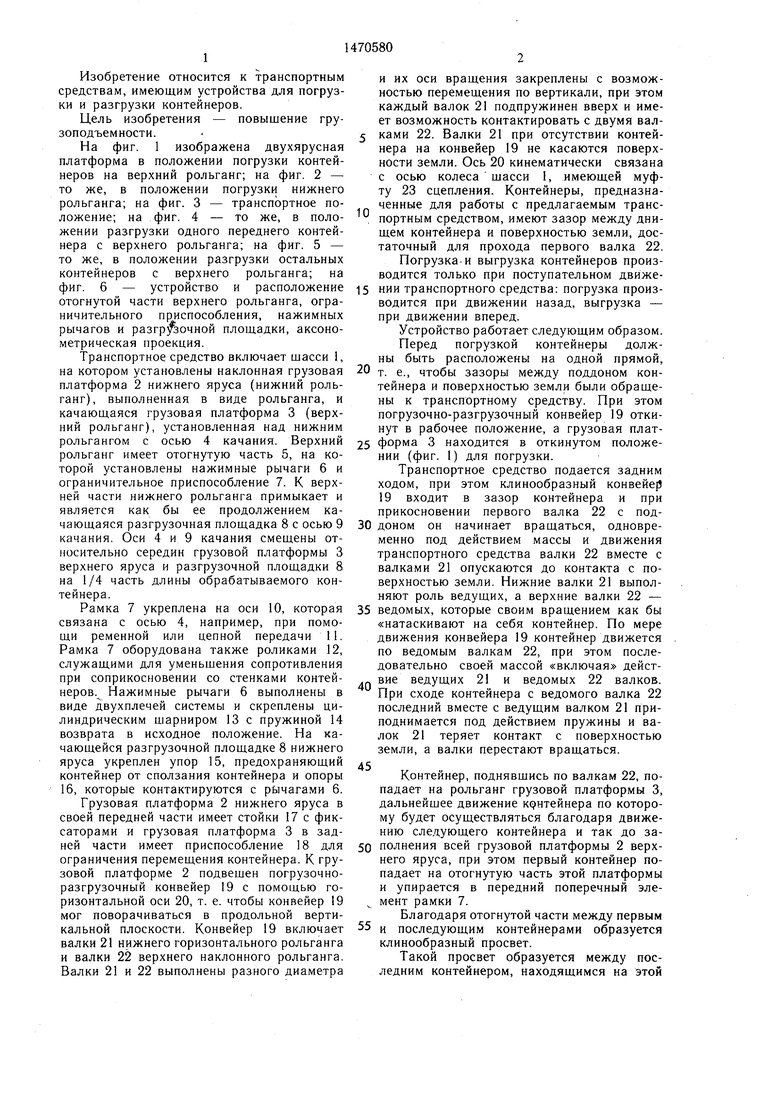

| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство | 1985 |
|
SU1263561A1 |
| Способ погрузки автомобилей в железнодорожный двухъярусный вагон | 2020 |
|
RU2751258C1 |
| Транспортное средство для погрузки и транспортирования контейнеров | 1987 |
|
SU1556959A1 |
| СПОСОБ УБОРКИ И ПОДГОТОВКИ КАПУСТЫ К ХРАНЕНИЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2244398C2 |
| СПОСОБ ТРАНСПОРТИРОВАНИЯ ГОРНОЙ МАССЫ ИЗ КАРЬЕРОВ И ШАХТ (ВАРИАНТЫ) | 1997 |
|
RU2136883C1 |
| Система для погрузки и выгрузки пакетированных грузов из транспортного средства | 1982 |
|
SU1129103A1 |
| Мобильный козловой кран | 2018 |
|
RU2706773C1 |
| ПОГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ ПЕРЕВОЗКИ КОНТЕЙНЕРОВ | 1991 |
|
RU2028220C1 |
| Транспортное средство для пере-ВОзКи пАКЕТиРОВАННыХ гРузОВ | 1979 |
|
SU802105A1 |
| Транспортное средство для перевозки контейнеров | 1990 |
|
SU1729845A1 |

Изобретение относится к транспортным средствам, имеющим устройство для погрузки и выгрузки контейнеров ,в частности, использующихся в условиях ограниченного пространства по ширине, например, в междурядьях интенсивных и высокоинтенсивных плодовых садов. Цель изобретения - повышение грузоподъемности. Цель достигается тем, что транспортное средство оборудовано нижней платформой 2 и верхней качающейся платформой 3 с рольгангами, погрузоразгрузочным конвейером, рамкой 7 для ограничения перемещения контейнеров на платформе 3 и площадкой 8 для перегрузки контейнера с платформы 3 на платформу 2. 3 з.п. ф-лы, 6 ил.
18
///////У//7// Y //// ///7// //7////// ///
19 201
Фаг. 1
//////////////////// /////// // //% /7///7у / 7/У//
Фи.г
/////////////////////////////%/////////////
Фиг. 3
fS
Фиг. 6
16
| Транспортное средство | 1985 |
|
SU1263561A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
