с6 вторыми входами соо ётствующих лбгических элементов И.
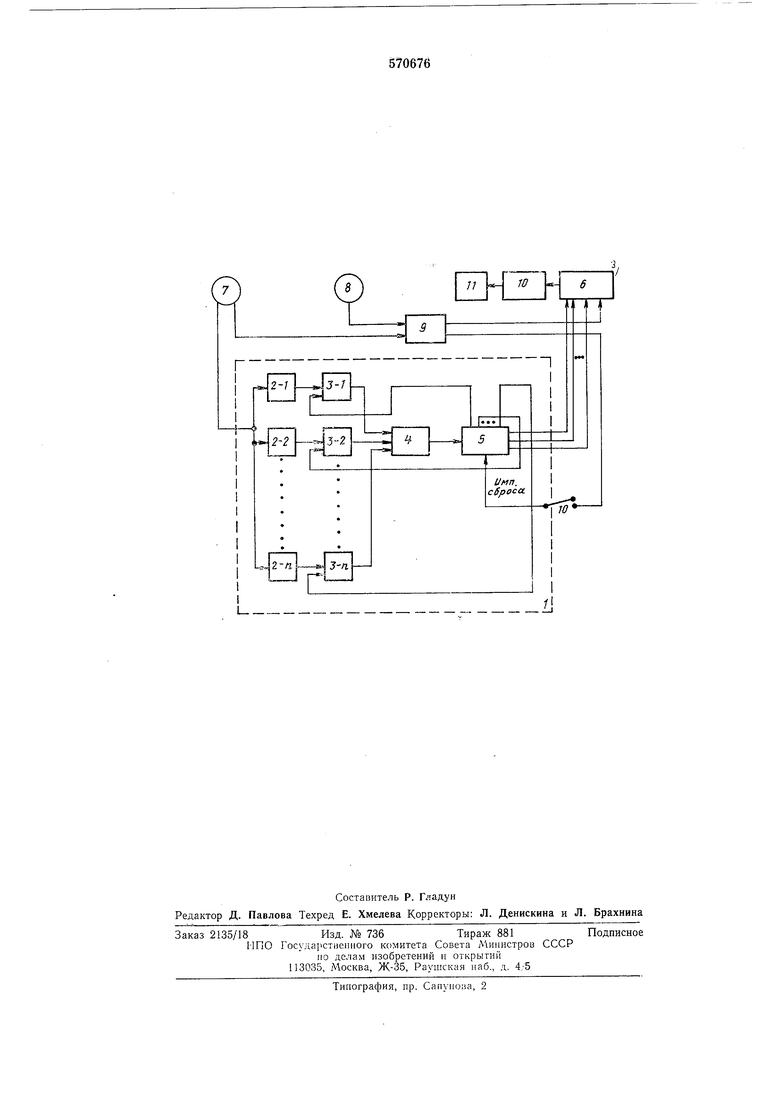
На чертеже представлена схема устройства, содержащая счетный блок 1, состоящий из потенциально-импульсных элементов (2-1...
2- п), п логических элементов И (3-1...
3- п) логического элемента ИЛИ 4, счетчика 5 числа импульсов; логический элемент ИЛИ 6; датчик 7 и задатчик 8 угла поворота роторной стрелы; нуль-орган 9; схему 10 управления приводом поворота роторной стрелы и реле 11 направления поворота.
Схема работает следующим образом.
При работе узкими заходками (угол поворота стрелы менее 60°) напряжение с выхода датчика угла поворота 7 сравнивается с напряжением с выхода задатчика 8 и при равенстве напряжений на выходе нуль-органа 9 формируется сигнал, который проходит через элемент ИЛИ 6 в схему управления приводом поворота и осуществляет реверс роторной стрелы.
При работе широкими заходками (угол поворота стрелы более 60°) в момент достижения угла ij5i формируется импульс на выходе потенциально-импульсного элемента 2-1. Этот импульс проходит через элементы И 3-1 (с выхода счетчика 5 на второй вход элемента И поступает сигнал), ИЛИ 4 и поступает на вход счетчика 5.
Счетчик 5 формирует сигнал, который через элемент ИЛИ 6 поступает в схему управления приводом поворота и осуществляет реверс роторной стрелы; блокирует элемент И 3-1 и разблокирует элемент И 3-2.
На следующем резе в направлении забоя также формируется импульс на выходе элемента 2-1 в момент достижения угла ifi. Однако этот импульс на счетчик 5 не проходит, так как элемент И 3-1 заблокирован.
На счетчик 5 проходит импульс с выхода элемента 2-2, так как элемент И 3-2 разблокирован. Дальнейшая работа схемы аналогична предыдущему случаю, но на этот раз снимается блокировка с элемента И 3-3 и блокируется элемент И 3-2.
Рассмотренные циклы повторяются до тех пор, пока на одном из последующих резов угол поворота стрелы в сторону забоя не достигнет 1J53, определенного задатчиком 8 с целью формирования заданного угла бокового откоса уступа. При этом с выхода нульоргана 9 поступит импульс, который позволит осуществить реверс стрелы, а также сбросить показания счетчика 5. Счетчик 5 в свою очередь формирует импульс, разблокирующий элемент И 3-1. Элементы схемы принимают исходное состояние; счет стружек начинается с момента достижения угла ijji при очередном повороте стрелы в сторону забоя.
При повороте роторной стрелы в сторону
Выработанного пространства с выхода датчика 7 снимается сигнал противоположной полярности. В этом случае элементы 2-1...- 2-п не работают, а импульс сброса с выхода
нуль-органа 9 на счетчик 5 не проходит вследствие того, что нормально открытый контакт реле 11 направления поворота стрелы разомкнут. Схема позволяет осуществить автоматическое управление приводом поворота стрелы при обработке блока, причем при углах поворота роторной стрелы, превышающих 60°, осуществляется ступенчатая компенсация эффекта выклинивания стружки, что в сочетаПИИ с существующими устройствами для автоматического регулирования производительности позволяет добиться стабильной производительности экскаватора в процессе экскавации всего реза.
Формула изобретения
1. Устройство автоматического управления приводом поворота роторной стрелы экскаватора с невыдвижной стрелой, включающее датчик и задатчик угла поворота, нуль-орган, реле и схему управления приводом, отличающееся тем, что, с целью автоматической компенсации эффекта выклинивания толщины стружки, оно донолнительно снабл ;ено логическим элементом ИЛИ и счетным блоком, первый вход которого соединен с соответствующим выходом датчика угла поворота, а второй вход счетного блока через нормально открытый контакт реле соединен с одним из выходов нуль-органа, другой выход которого соединен с одним из входов логического элемента ИЛИ, другие входы которого соединены с выходами счетного блока.
2. Устройство по п. 1, отличающееся тем, что счетный блок включает счетчик числа импульсов, логические элементы ИЛИ, И и потенциально-импульсные элементы, выходы которых соединены с одним из входов соответствующих элементов И, выходы которых через логическую схему ИЛИ соединены с входом счетчика числа имнульсов, соответствующие выходы которого соединены со вторыми входами соответствующих логических
элементов И.
Источники информации, принятые во внимание при экспертизе
1.Акутин Г. А. и др. Программное управление роторными экскаваторами. Киев, «Техника, 1968, с. 31-38.
2.Кравченко Я. С. и др. Опыт и эффективность применения автоматического управления роторными экскаваторами. М., «Недра, 1968, с. 15--18.
3. Авторское свидетельство СССР № 164844, кл. Е 02F 9/20, 1962.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления приводом поворота роторной стрелы экскаватора с невыдвижной стрелой | 1978 |
|
SU713947A1 |
| Устройство дозированной подачи поворота роторной стрелы экскаватора | 1977 |
|
SU747941A1 |
| Устройство программного управления поворотным механизмом роторной стрелы экскаватора | 1987 |
|
SU1470879A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЯ РАБОЧЕГО | 1973 |
|
SU374422A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Устройство для автоматического управления процессом копания роторного экскаватора | 1986 |
|
SU1421828A1 |
| Устройство для автоматического управления поворотом роторной стрелы экскаватора | 1980 |
|
SU899761A1 |
| Устройство управления механизмом подачи рабочего органа роторного экскаватора | 1983 |
|
SU1093759A1 |