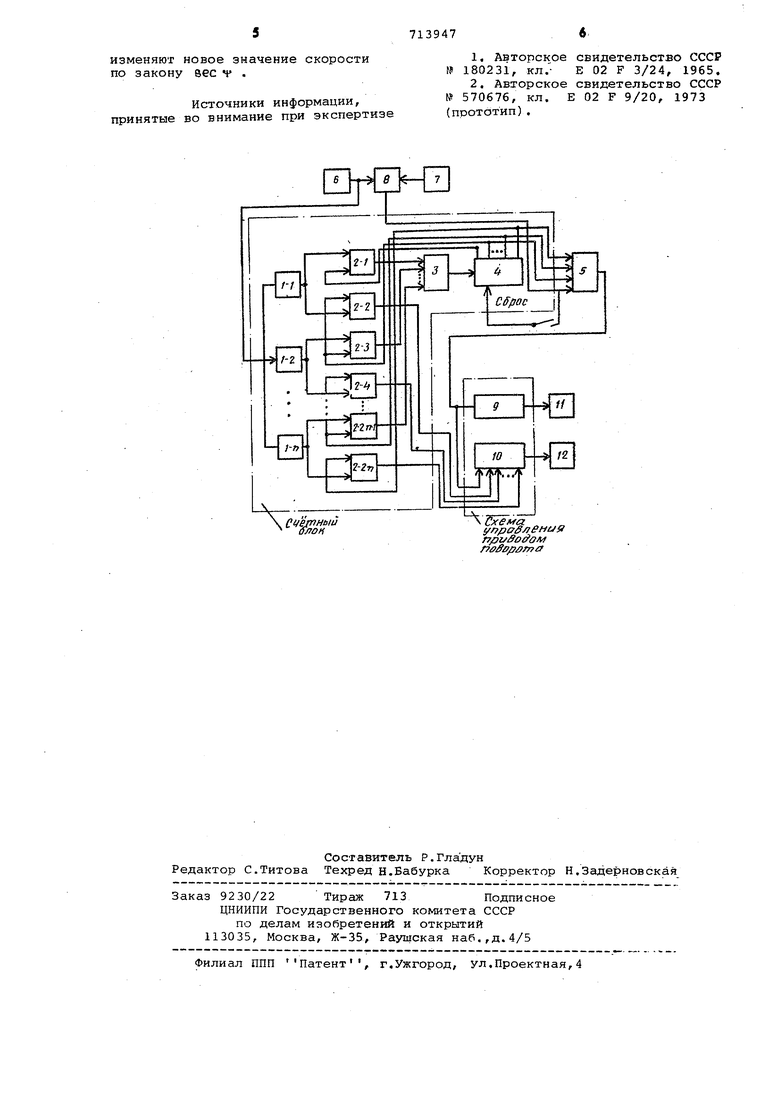
Изобретение относится к автомати зации производственных процессов на открытых горных выработках и в стро ительстве и может найти примзнение : на вскрышных и добычных экскаватоpax с невыдвижной стрелой. Известен способ автоматического управления приводом поворота роторной стрелы экскаватора, заключающийся в том, чтос целью.компенсации уменьшения толщины стружки на р эе скорость поворота роторной стрел изменяют по законуsecv где V - угол поворота роторной стрелы 1. Однако способ не позволяет эффективно поддерживать заданную прои водительность экскаватора с невыдви ной стрелой при углах поворота роторной стрелы V, превышающих 60° Это объясняется тем, что с увеличе нием угла v уменьшение толвшны стружки оказывается настолько большим (при Y 90° тол1ттина стружки равна нулю), что вследствие конечно значения максимальной скорости пово рота роторной стрелы не может быть скомпенсировано за счет увеличения ширины стружки. Известен также -способ автоматиче кого управления приводом поворота роторной стрелы экскаватора с невыдвижной стрелой, заключаюи йся в том, что при углах поворота роторной стре.пы, превышающих 60, выбирают П промежуточных значений углов поворота стрелы до заданного значения и произ.водят, реверсы на каждом -ом резе (,5,7 ...) в направлении уступа последовательно при достижении роторной стрело этих углов- Zj. Существенным недостатком этого способа является то, что при повороте роторной стрелы в сторону уступа от j -го до (J+1) - го угла толщина стружки выклинивается пропорциональHo(osf В результате качество стаг билизации производительности при реализации этого способа значительно снижается. ЦёЛь изобретения. - повышение качества стабилизации производительности на протяжении всего реза при повороте роторной стрелы в сторону уступа. Эта цель достигается тем, что на каждом i -ом резе при достижении стрелою заданного ; промежуточного угла, при котором.осуществлялся предыдущий реверс, уменьшают текущую скорость поворота стрелы до величины ее начального и до момента реверса изменяют новое значение скорости по закону sec Т. На чертеже изображена структурная схема одного из возмо ных устройств, с помощью которого мэжно управлять1ТРИВОДОМ поворота роторной стретсы по указанному способу. Устройство включает счетный блок, состоящий из п потенциально-импульсных элементов (l-l-l-n), 2л логичес ких элементов И (2-1-2-20) логи ческого элемента ИЛИ -3; счетчик 4 числа импульсов; логический элемен ИЛИ 5; датчик 6 и задатчик 8 угла поворота роторной стрелы; нульорган 7; схему управления приводовповорота роторной стрелы, состоящуюиз блока реверсирования блока задания скорости 11, реле направлени поворота 11 и блок программного изме йения скорости по закону sec Н 12. Схема работает следуюг дам образом. При работе узкими заходками (Угол поворота; менее 60 I напряжение с выхода датчика угла.поворота б сравнивается с напряжением с выхода; задатчика 8 и при равенстве напрдженийна-эыходе нуль-органа 7 фор мируется сигнал, который проходк:т через элемент ИЛИ 5 в блок ревер сирования 9 схемы управления приводом поворота, осуществляя реверс роторной стрелы. При работе широкими заходками: (угол поворота стрелы более 60®) в момент достижения угла ч. , формирует ся импульс на выходе потенциально- , импульсного элемента 1-1 Этот импульс проходит через элементы 2-J. (с -выхода счетчика 4 на второй также поступает вход элемента сигнал), ИЛИ 3 и поступает на вход счетчика 4. Счётчик 4 выполняет следующие; функции: формирует сигнал, который через элемент ИЛИ 5 поступает в схему управления приводом поворота в блок 9 реверсирования и блок Ю задания скорости 10, При этом осуществляется реверс роторной стрелы и устанавливается начальное задание скорости nqBOpOTa; блокирует элемент и 2-1 и раз бJ(IOкиpyeт элементы И 2-2 и 2-3. .На следувдкем резе в направлении забоя также формируется импульс на выходе потендиально-нмпульсного элемента 1-1 в момент достижения роторной стрелой угла YI . Этот импульс пр ходит через .элемент И 2-2 в схем управления приводом поворота в блок 10 задания скорости, где осуществляет ступенчатое изменение величины задания скорости поворота. Новая величина задания подается в блок программного изменения скорости поворота роторной стрелы. При этом скорость поворота уменьшается до начального значения, а затем в процессе реза изменяется по закону секанса до угла .- мэмент достижения угла т. формируется импульс на выходе потенциально импульсного элемента 1-2,который проходит через элемент И 2-3, ИЛИ 3 на счетчик 4 импульсов . Цикл повторяется до тех пор, пока угол поворота стрелы в сторону уступа не достигнет к , определенного задатчиком8 с формирования заданного угла откоса уступа. При этом с выхода нуль-органа 7 поступает импульс, который позволит осуществить реверс стрелы, установить начальное задание скорости поворота и сбросить показания счетчика импульсов. Элементы схемы принимают исходное состояние. При повороте роторной стрелы в сторону выработанного пространства с выхода датчика б снимается сигнал противоположной полярности. .В этом случае элементы l-i-i-П е работают, а имупльс сброса с выхода нуль-органа 7 на счет.чик 4 не проходит вследствие того, что контакт реле 11 направления поворотастрелы разомкнут. Описываемый способ позволяет повысить качество стабилизации произво-. дительности экскаватора путем ступ.енчатой компенсации уменьшения толщины стружки при углах поворота стрелы, превышающих 60° и регулирования скорости по закону sec Т на протяжении всего реза. Формула изобретения . Способ автоматического управления приводом поворота роторной стрелы.. экскаватора с невыдвижной стрелой, заключаю1циййя в том, -что при углах поворота роторной стрелы, превышающих 60, выбирают п промежуточных значений углов поворота стрелы до заданного значения и производят реверсы на каждом 1 -ом резе (I 3,5,7...) в направлении уступа последовательно при достижении роторной стрелой этих :углов, отличающийс я тем, что, с целью повышения качества стабилизации производительности, на каждом J -ом резе при достижении стрелою заданного промежуточного угла, при котором осуществлялся поедыдушрй реверс, уменьшают текущую скорость поворота стрелы до величины ее начального значения и до момента реверса
изменяют новое значение скорости по закону вес v .
Источники информации, принятые во внимание при экспертизе
1,Авторск ое свидетельство СССР № 180231, кл.- Е 02 F 3/24, 1965.
2.Авторское свидетельство СССР № 570676, кл. Е 02 F 9/20, 1973 (прототип),
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления приводом поворота роторной стрелы экскаватора с невыдвижной стрелой | 1973 |
|
SU570676A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ С НЕВЫДВИЖНОЙ СТРЕЛОЙ | 1966 |
|
SU214641A1 |
| Устройство программного управления поворотным механизмом роторной стрелы экскаватора | 1987 |
|
SU1470879A1 |
| Способ автоматического управления роторным экскаватором | 1983 |
|
SU1157168A1 |
| Устройство для автоматического управления поворотом роторной стрелы экскаватора | 1980 |
|
SU899761A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| Способ задания скорости поворотного механизма роторного экскаватора | 1979 |
|
SU910942A1 |
| Устройство управления электроприводом поворота стрелы роторного экскаватора | 1983 |
|
SU1165746A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| Устройство дозированной подачи поворота роторной стрелы экскаватора | 1977 |
|
SU747941A1 |
Счвгпнмй
fffOH
Схема
yrfpcfS/iefiuSi
nflt/ffO OM
neSffflafna
