Известен станок-автомат для гибки проволочных держателей радиоламп, состоящий из механизмов: подачи проволоки, отрезюи заготовки, пооперационной гибки и съемодержателя.
Предлагаемый станок позволяет, в отличие от известного, избежать излишних напряжения в материале и срабатывания механизмов гибки в такой последовательности, чтобы деформация проволоки происходила от середины заготовки к концам без дополнительной ее транспортировки.
Это достигнуто -путем изготовления пуансонов, выполняющих одну операцию, как одно целое с матрицами или оправками и срабатывания механизмов гибки в такой последовательности, чтобы деформация проволоки происходила от середины заготовки к концам без дополнительной ее транспортировки, пуансон.ы, выполняющие одну операцию, изготовлены как одно целое с матрицами или оправками.
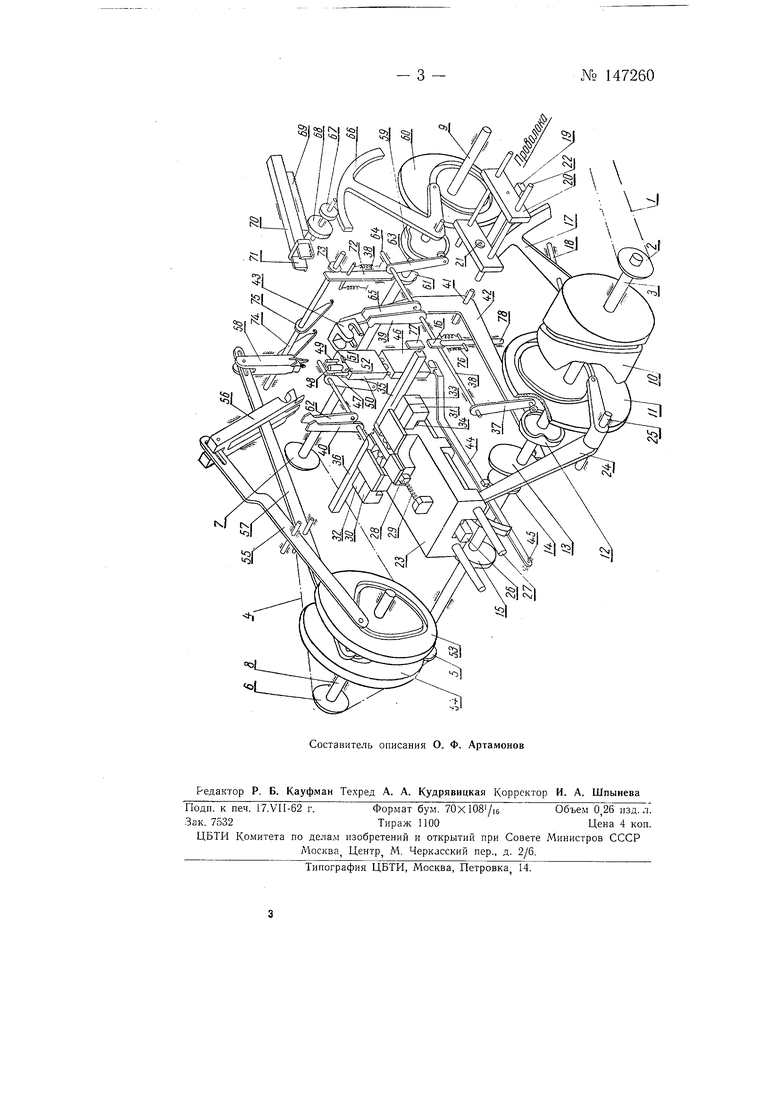
На чертеже показана, конструкция описываемого станка-автомата.
От электродвигателя через редуктор (на чертеже не показаны) посредством цепи / и звездочки 2 движение передается на главный кулачковый вал 3, а от него цепью 4 и звездочками 5, 6, 7 - на кулачковые валы S и 9. На кулачковом валу 3 закреплены кулачки -Ю, 11, 12, 13, 14, 15, а также кулачок привода подвижного ножа 16 (на чертеже не показан). В паз кулачка 10 входит палец рычага 17, конец которого выполнен в виде зубчатого сектора. Рычаг 17 вращается на оси 18. Зубчатый сектор рычага 17 входит в зацепление с рейкой 19 каретки 20 для подачи проволоки. Каретка 20, снабженная щариковой цангой 21, служащей для захвата проволоки, перемещается по направляющим 22.
№ 147260- 2 Кулачок 11 передает движение каретке 23 посредством рычага 24, вращающегося на оси 25, через зубчатый сектор и рейку 26, закрепленную на каретке 23, которая перемещается ло направляющим 27. На каретке 23 установлены: прижим 28, на ходящийся под действием пружины 29, и две пары боковых пуансонов 30, 31 и 32, 33. Этн пуансоны пружинами 34 отжимаются от оси каретки 23. Каретка 23 снабжена планками 35 и 36, в пазах которых помещается заготовка. Кулачок 12 через рычаг 37 и вал 38 передает движение рычагу 39. Кулачок 15 служит для передачи движения рычагу 40. Кулачок 13 через вращающийся на оси 41 рычаг 42 приводит в движение пуансон 43, а кулачок 14 - через рычаг 44, вращающийся на оси 45, создает возвратно-поступательное движение держателю 46 с закрепленными на нем оправками 47, 48, 49. Эти оправки проходят сквозь неподвижную колодку 50, снабженную выступами 51 и пластинкой 52.
На кулачковом валу 8 закреплены кулачки 53 и 54. Кулачок 53 через рычаг 55 перемещает наклонный пуансон 56, а кулачок 54 через рычаг 57 - верхний пуансон 58. Кулачковый вал 9 несет на себе кулачки 59, 60 и 6, а также кулачок привода рычага 62. Кулачок 59 через рычаг 63 и валик 64 сообщает движение рычагу 65, а кулачок 60 через рычаг 66, снабженный зубчатым сектором, - зубчатым колесам 67 и 68 и рейке 69, а через нее - ползуну 70 с закрепленным на нем пуансоном 7/. Кулачок 61 через рейку 72 и зубчатое колесо 73 сообщает движение валу 74 с закрепленными на нем съемниками 75. Цифрой 76 обозначены пружины подвижного ножа 16, а цифрой 77 - неподвижный нож; цифрой 78 - планка подвижного ножа 16.
Предмет изобретения
Станок-автомат для гибки проволочных держате ей радиолам п, состоящий из механизмов подачи проволоки, отрезки заготовки, пооперационной гибки и съема держателя, отличающийся тем, что, с целью избежания излищних напряжений в материале и срабатывания механизмов гибки в такой последовательности, чтобы деформация проволоки происходила от середины заготовки к концам без дополнительной ее транспортировки, пуансоны, выполняющие одну операцию, изготовлены как одно целое с матрицами или оправками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для изготовления двухветвевых пружин | 1973 |
|
SU484036A1 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН с ДВУМЯ ВЕТВЯМИ ПРОТИВОПОЛОЖНОГО НАПРАВЛЕНИЯ | 1971 |
|
SU424644A1 |
| Автомат для отрезки и гибки проволочных деталей | 1960 |
|
SU136301A1 |
| Автомат для изготовления двухветвевых пружин с отогнутыми концами | 1982 |
|
SU1052304A1 |
| Автомат для изготовления двух ветвевых пружин с отогнутыми концами | 1989 |
|
SU1657263A1 |
| Автомат для изготовления деталей из проволоки | 1972 |
|
SU444592A1 |
| Автомат для изготовления изделий из проволоки типа шплинтов | 1982 |
|
SU1093380A1 |
| УСТРОЙСТВО для ИЗГОТОВЛЕНИЯ ЗАСТЕГИВАЮЩИХСЯ | 1973 |
|
SU378275A1 |
| Устройство для изготовления проволочных разводных шплинтов | 1988 |
|
SU1563818A1 |
| Цепевязальный автомат | 1979 |
|
SU1022396A1 |