Известны автоматы для изготовления плоских пружин из прово.поки, снабженные устройством для навивки цилиндрических винтовых пружин с заданным количеством витков.
Описываемый автомат отличается от известных тем, что в нем применен механизм для преобразования цилиндрической пружины в плоскую, состоящий из сдвигающего винтовые витки пуансона, взаимодействующего с неподвижной матрицей, и расположенный под матрицей направляющий наклонный лоток, переходящий в изогнутый лоток, направление изгиба которого противоположно направлению изгиба отформованной пружины. Это повышает качество изготовления пружин.
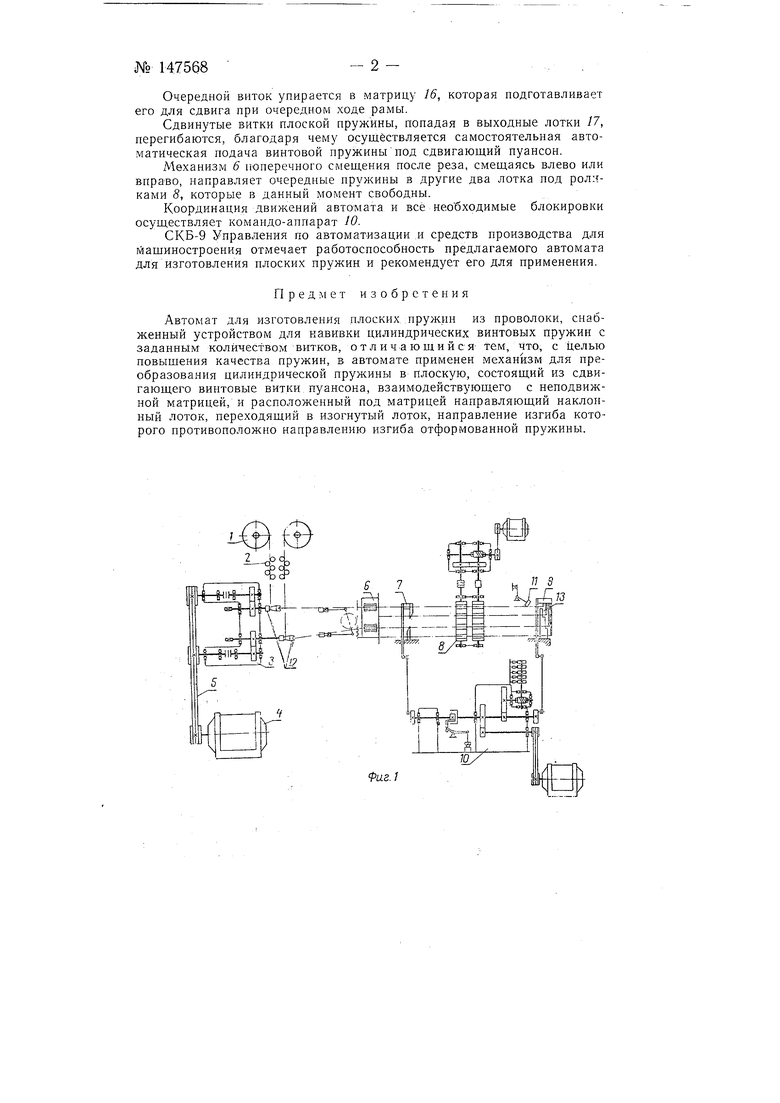
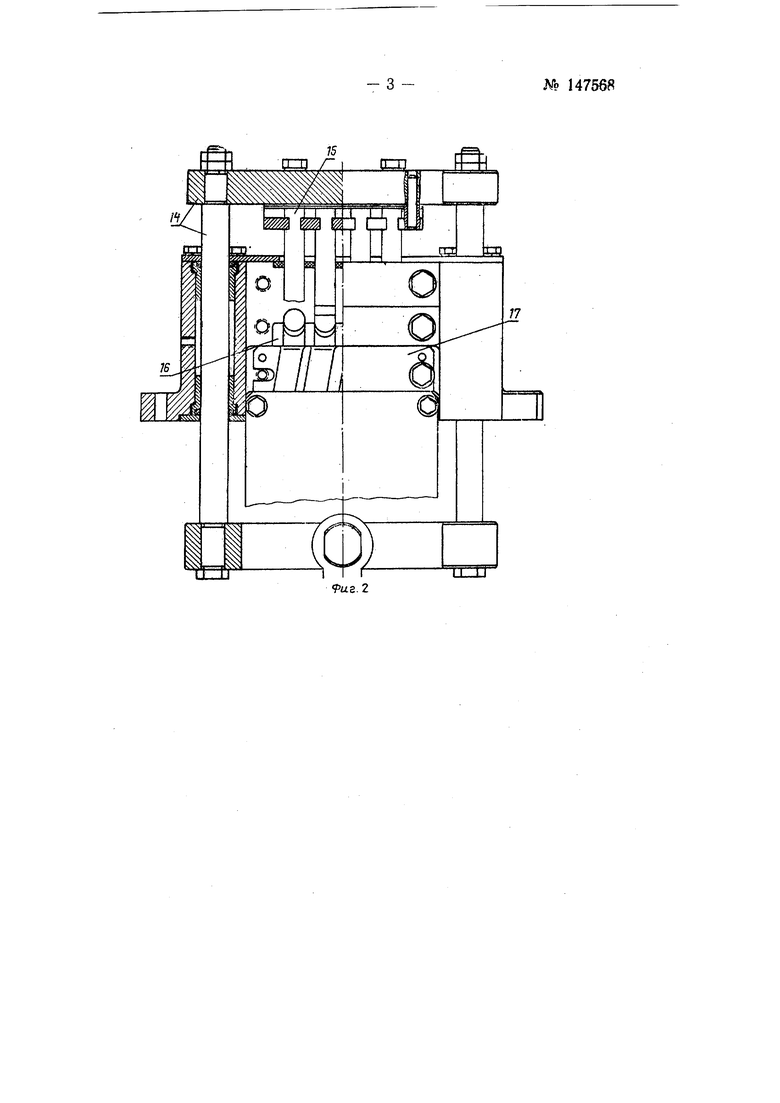
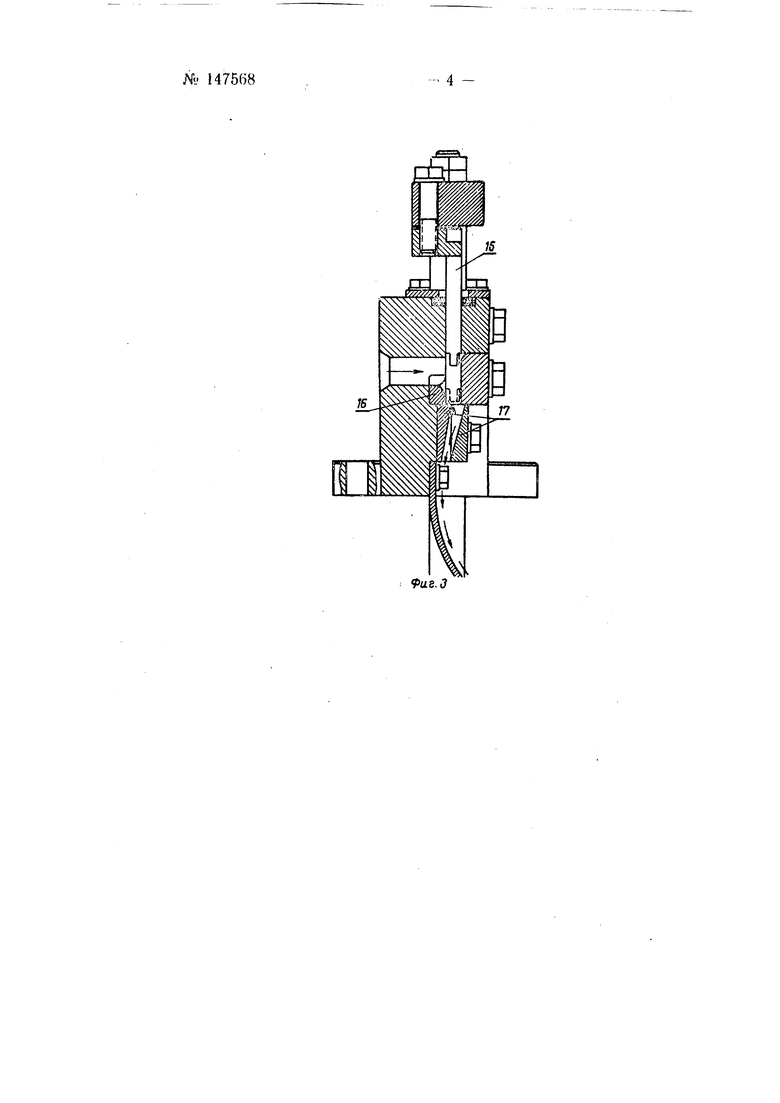
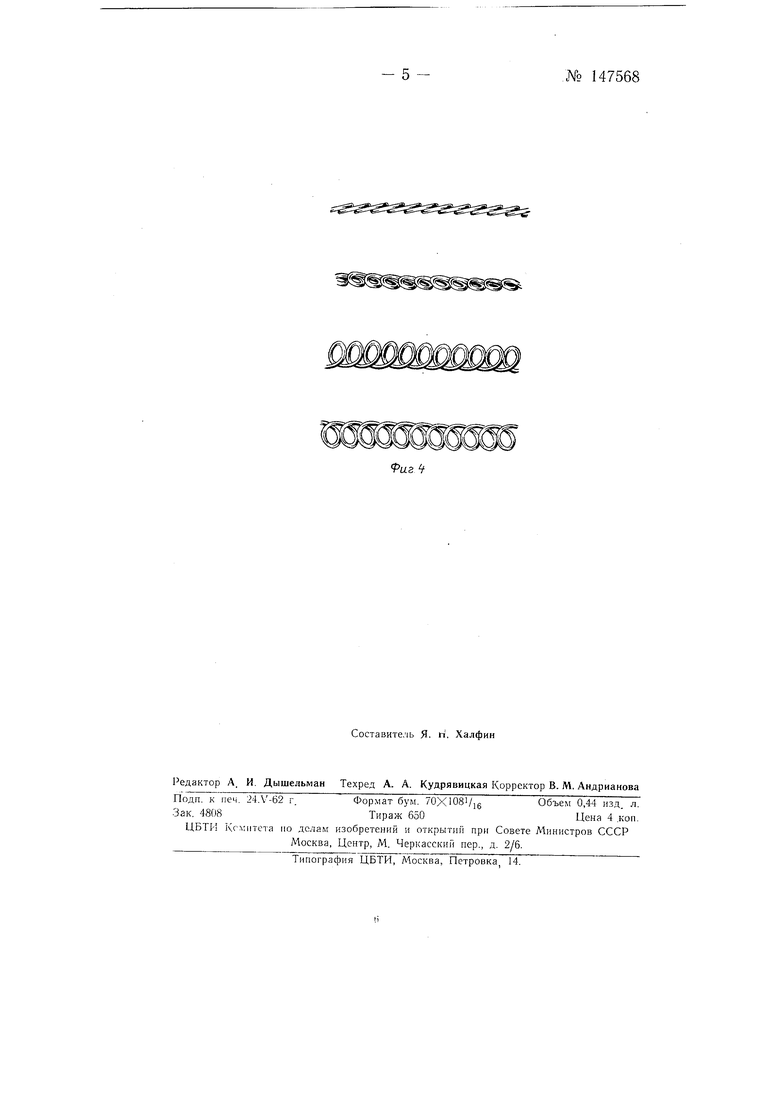
На фиг. 1 изображена кинематическая схема автомата; на фиг. 2 и 3- механизм сдвига в двух проекциях; на фиг. 4 - плоская пружина.
Автомат для изготовления плоских пружин состоит из двух разматывателей /, правильных роликов 2, навивающей головки 3, приводимой в движение электродвигателем 4 через ременную передачу 5, механизма 6 поперечного смещения, механизма 7 реза, подающих роликов 8, механизма 9 сдвига, командо-аппарата W датчика // длины пружины.
Автомат работает следующим образом.
С разматывателей / проволока через правильные ролики 2 подается на оправки 12 навивающей головки 5, которая одновременно вьет две винтовые пружины. Через механизм 6 поперечного смещения и механизм 7 реза пружины подаются в два из четырех лотков, находящихся под подающими роликами 8. Нож механизма реза, периодически опускаясь, отрезает винтовые пружины нужной длины, которые увлекаются роликами 8 в ручьи 13 механизма 9 сдвига. При этом движением рамы 14 четыре пуансона 15 сдвигают виток винтовой пружины вниз№ 147568- 2 -.
Очередной виток упирается в матрицу /5, которая подготавливает его для сдвига при очередном ходе рамы.
Сдвинутые витки плоской пружины, попадая в выходные лотки /7, перегибаются, благодаря чему осуществляется самостоятельиая автоматическая подача винтовой пружины под сдвигающий пуансон.
Механизм 6 поперечного смещения после реза, смещаясь влево или вправо, направляет очередные пружины в другие два лотка под рол:тками 8, которые в данный момент свободны.
Координация движений автомата и всё необходимые блокировки осуществляет комаидо-аппарат 10.
СКБ-9 Управления по автоматизации и средств производства для мащиностроения отмечает работоспособность предлагаемого автомата для изготовления плоских пружин и рекомендует его для применения.
Предмет изобретения
Автомат для изготовления плоских пружип из проволоки, снабженный устройством для навивки цилиндрических винтовых пружин с заданным количеством витков, отличающийся тем, что, с целью повыщеиия качества пружин, в автомате применен механизм для преобразования цилиндрической пружины в плоскую, состоящий из сдвигающего винтовые витки пуансона, взаимодействующего с неподвижной матрицей, и расположенный под матрицей направляющий наклонный лоток, переходящий в изогнутый лоток, направление изгиба которого противоположно направлению изгиба отформованной пружины.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРОВОЛОЧНЫХ СПИРАЛЕЙ | 2003 |
|
RU2264882C2 |
| Автомат для изготовления плоских пружин из проволоки | 1990 |
|
SU1719137A1 |
| Автомат для изготовления плоских спиральных пружин | 1975 |
|
SU536871A1 |
| Способ подготовки металлической проволоки перед навивкой винтовых пружин | 2022 |
|
RU2785202C1 |
| Устройство для навивки пружин | 1982 |
|
SU1147495A1 |
| Навивочное устройство автомата для изготовления спиральных пружин | 1977 |
|
SU657894A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПРУЖИН С ДВУХСТОРОННЕЙ НАВИВКОЙ И ИЗГИБОМ В СРЕДНЕЙ ЧАСТИ | 2001 |
|
RU2197356C1 |
| Автомат для навивки пружин | 1978 |
|
SU776725A1 |
| Автомат для изготовления плоских спиральных пружин | 1975 |
|
SU534286A1 |
| Устройство для горячей навивки жестких винтовых деталей и пружин | 1984 |
|
SU1234015A1 |
Юх
Puz.J
. J
