1
Изобретение относится к подъемно- транспортной технике, а именно к механизмам фиксации захватных рыча- ,гов1 грузозахватных устройств.
Целью изобретения является повышение надежности.
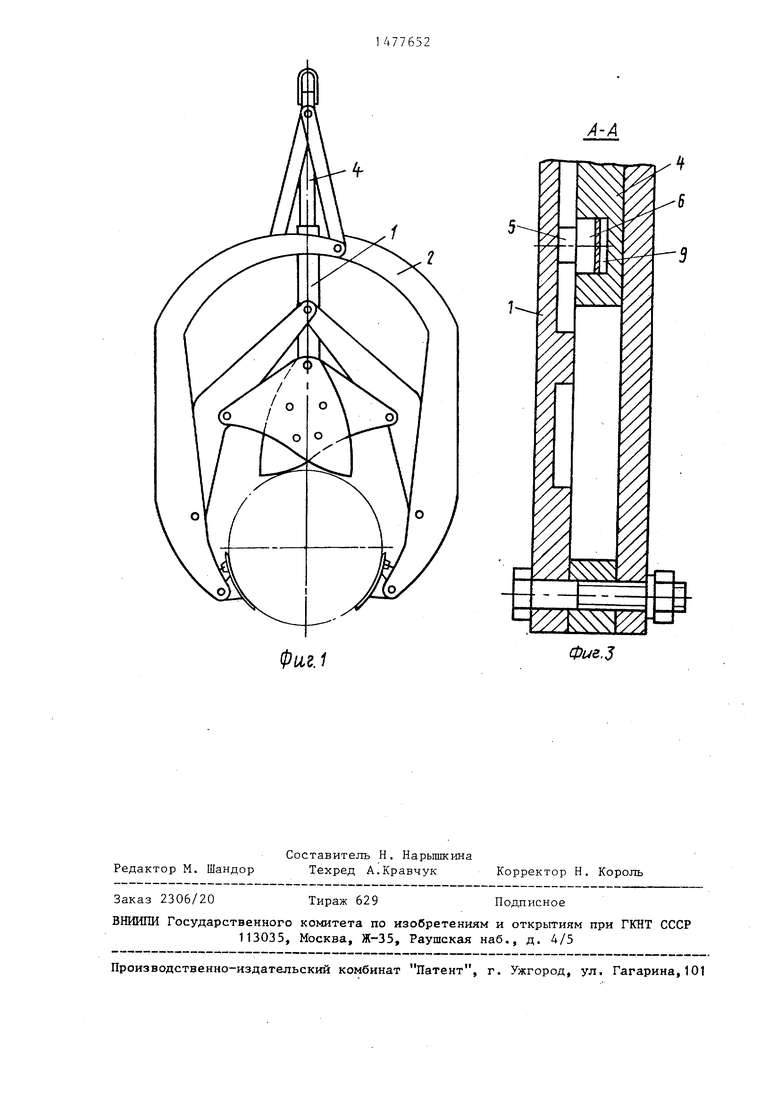
На фиг. 1 изображено грузозахватное устройство с механизмом фиксации положения захватных рычагов; на фиг. 2 - механизм фиксации захватных рычагов грузозахватного устройства разрез; на фиг. 3 - разрез А-А на фиг . 2.
Механизм фиксации положения захватных рычагов грузозахватного устройствам содержит полый корпус 1, шарнирно связанный с захватными рычагами 2 грузозахватного устройства (фиг. 1), направляющую 3, выполненную в корпусе 1, ползун 4, расположенный в корпусе 1 с возможностью пе ремещения вдоль направляющей 3 (фиг. 2) и шарнирно связанный с захватными органами 2, палец 5 и ролик 6 (фиг. 2) .
В корпусе 1 выполнен фигурный паз 7, а в ползуне 4 - горизонтальная прорезь 8, расположенная перпендикулярно направляющей 3 (фиг . 2)„
Один конец пальца 5 расположен в пазу 7, а на другом смонтирован ролик 6, который расположен в прорези 8 с возможностью перемещения вдоль этой прорези. Между роликом 6 и ползуном 4 смонтирована плоская пружина 9 (фиг . 3) .
Фигурный паз 7 имеет участки перехода из одного положения захватных органов 2 в другое: а, Ь, с и d, и участки их фиксации I и II, соответственно, в раскрытом положении и положении захвата.
Механизм работает следующим образом .
Ползун 4 механизма фиксации положения захватных рычагов грузозахватного устройства соединяют с грузоподъемным органом (не показан). При этом палец 5 находится на участке I фигурного паза 7, захватные рычаги 2 зафиксированы в раскрытом положении.
Грузозахватное устройство опускают на захватываемый груз (не пока776522
зан). Ползун 4 перемещается в сторону груза но направляющей 3 корпуса 1 и одновременно с этим приводит в движение палец 5. Последний скользит по участку с к участку d фигурного паза 7, при этом ролик 6 движется вдоль прорези 8.
Одновременно с упиранием грузоJQ захватного устройства в поверхность груза, грузоподъемный орган начинает перемещать ползун 4 в обратном направлении. При этом палец 5 скользит вдоль участков d и а в положение II.
15 Захватные рычаги 2 захватывают груз и поднимают.
После транспортировки груза при опускании его до упора ползун 4 вместе с пальцем 5 перемещаются снова в
2д сторону груза по участку а фигурного паза 7. Это соответствует переводу захватных рычагов 2 в раскрытое положение и освобождению груза от захвата .
25
Затем грузоподъемное устройство поднимают и, одновременно с этим, ползун 4 перемещается под действием грузоподъемного органа в обратном
30 направлении. При этом палец 5 перемещается по участку b фигурного паза 7 к участку 1. При этом происходит фиксация захватных рычагов 2 в раскрытом положении.
35 формула изобретения
Механизм фиксации положения захват ных рьиагов грузозахватного устройства, содержащий полый вертикально 4Q расположенный корпус с продольной
направляющей в верхней части и фигурным пазом в его нижней части на внутренней стороне, ползун, установленный в продольной направляющей корпуса, и палец, расположенный в фигурном пазу одним концом, отличающийся тем, что, с целью повышения надежности, в нижней части ползуна выполнена горизонтальная прорезь, а механизм снабжен роликом,
50
установленным в прорези ползуна, подпружиненным относительно стенки последнего и закрепленным на свободном конце пальца.
А-А
5-,Ј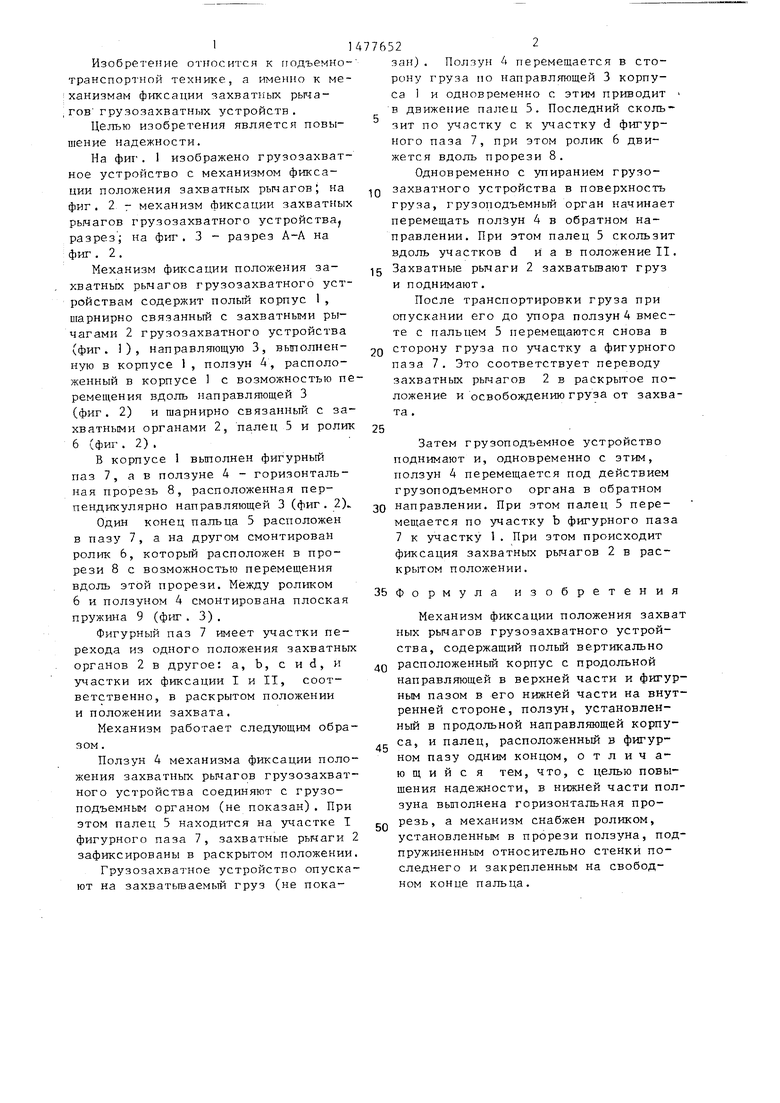
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1980 |
|
SU912623A1 |
| Механизм фиксации грузозахватногоуСТРОйСТВА | 1978 |
|
SU839986A1 |
| Механизм фиксации грузозахватного устройства | 1982 |
|
SU1074804A1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
SU1837563A1 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
Изобретение относится к подъемно-транспортному оборудованию, в частности к механизмам фиксации захватных рычагов грузозахватных устройств. Целью изобретения является повышение надежности. Механизм фиксации положения захватных рычагов грузозахватного устройства состоит из полого корпуса 1 с продольной направляющей и ползуна 4. В нижней части корпуса 1 выполнен фигурный паз 7, в котором установлен палец 5, а в нижней части ползуна имеется горизонтальная прорезь 8, в которой установлен подпружиненный ролик 6, жестко закрепленный на конце пальца 5. 3 ил.
фиг.1
Редактор М. Шандор
Составитель Н. Нарышкина Техред А.Кравчук
Заказ 2306/20
Тираж 629
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Фиг.З
Корректор Н. Король
Подписное
| Механизм фиксации грузозахватногоуСТРОйСТВА | 1978 |
|
SU839986A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
