1
Изобретение относится к подъемно-транспортному оборудованию, а именно к механизму фиксации грузозахватного устройства.
Известен механизм фиксации грузозахватного устройства, содержащий корпус с фигурной прорезью и подвижный относительно него ползун с тягой, на свободном конце которой закреплен палец, установленный в прорези l.
Недостатком известного устройства является низкая надежность его работы.
Цель изобретения - повьшение надежности его работы.
Указанная цель достигается тем, что корпус имеет вертикальный паз, в котором установлен ползун, а тяга связана с ним шарнирно, при этом упомянутая фигурная прорезь выполненс петлеобразной и имеет три упорных участка, расположенных в шахматном порядке, причет каждый последующий
участок смещен относительно предьщущего на величину, большую диаметра пальца.
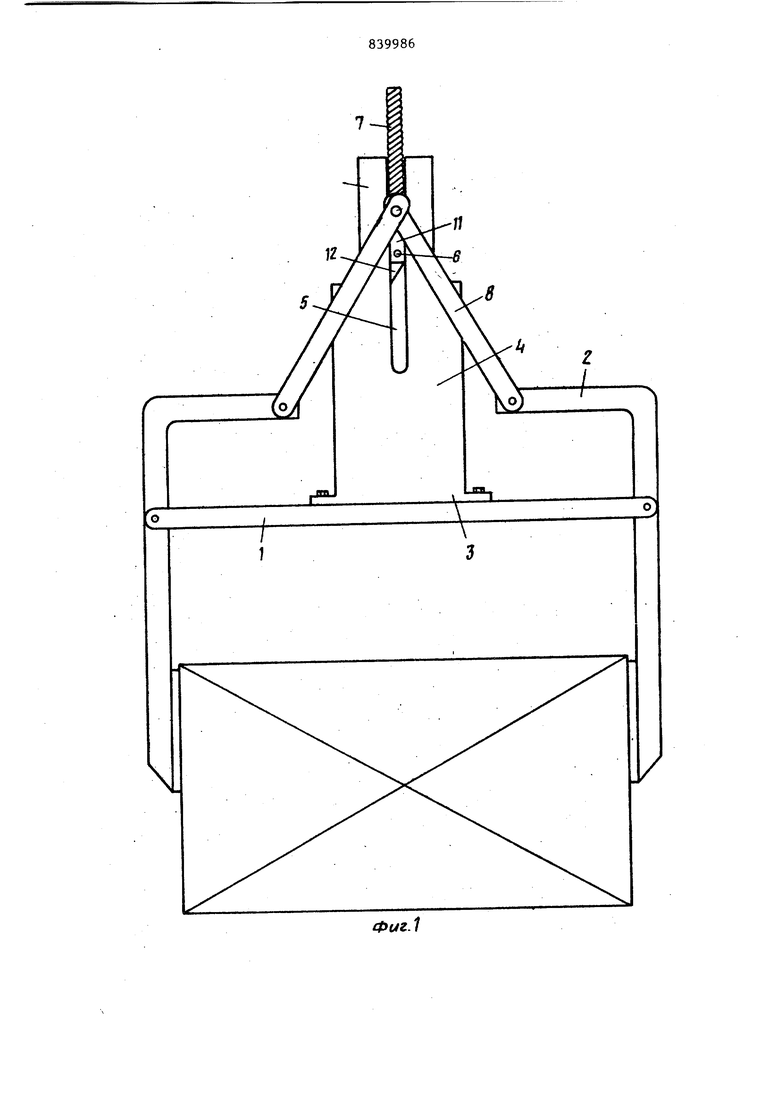
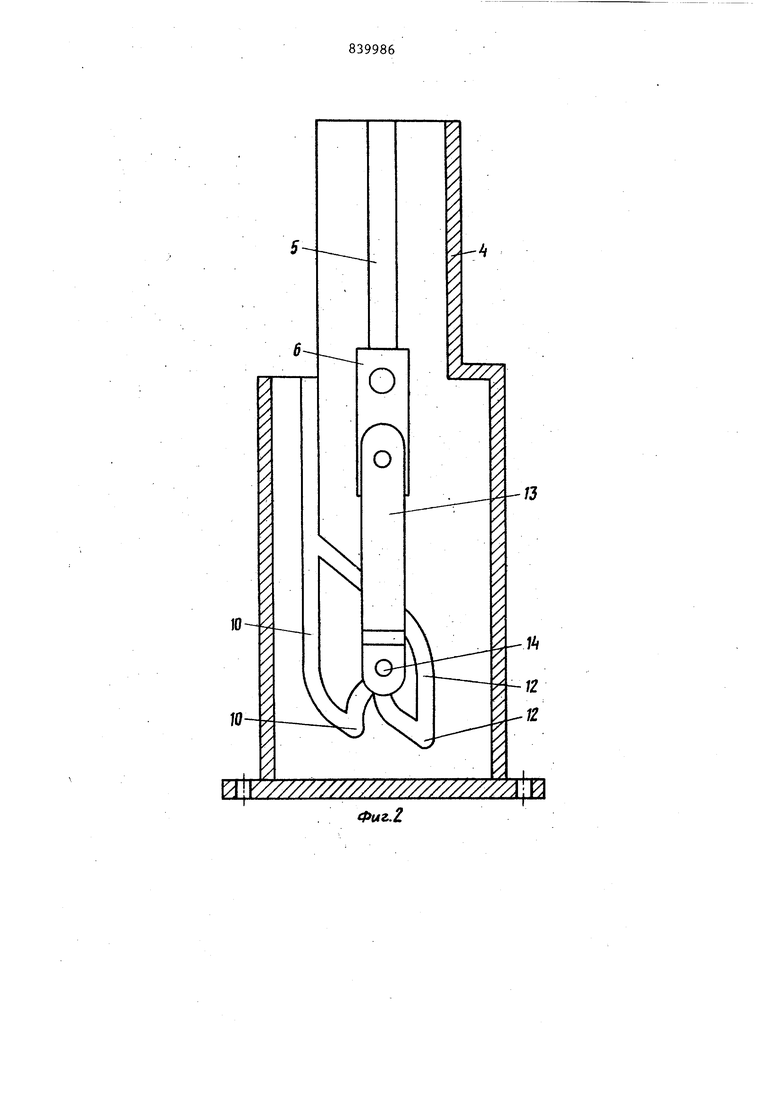
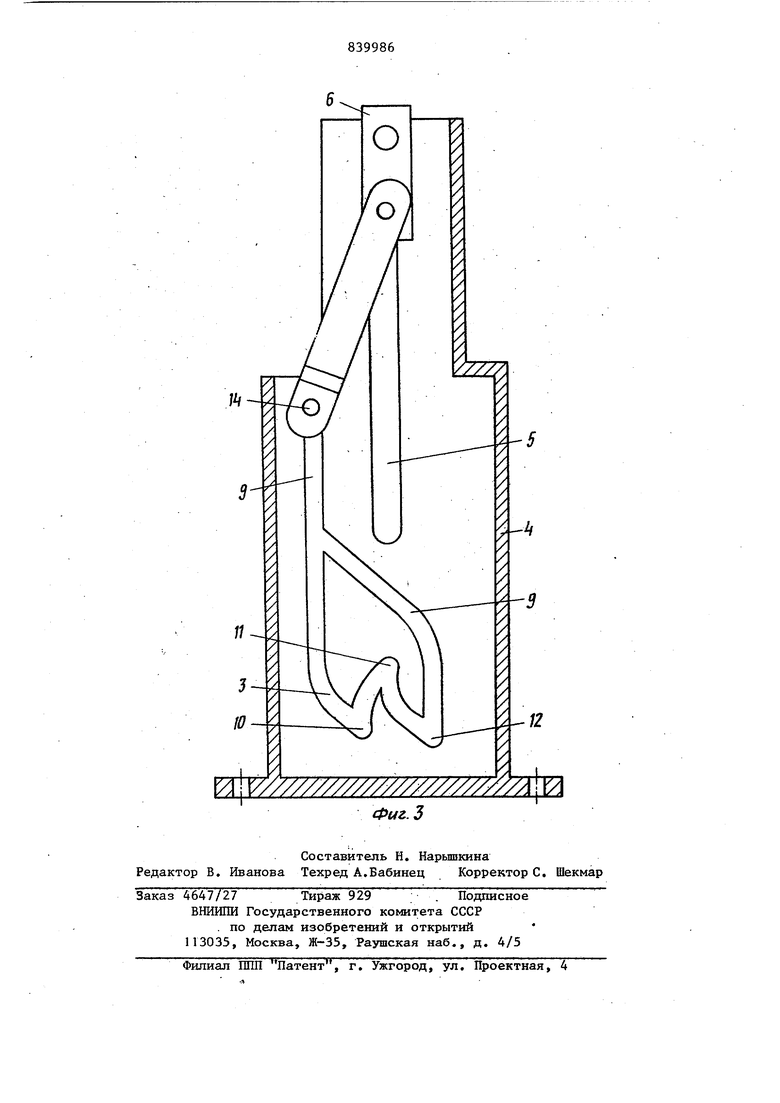
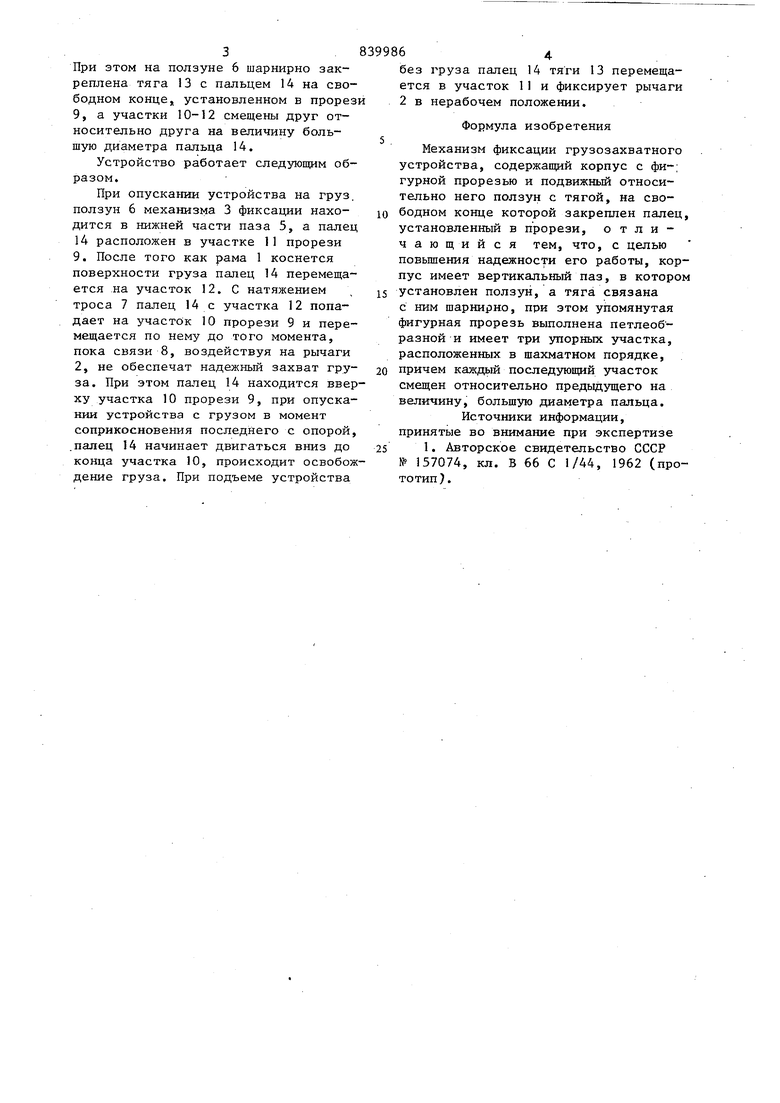
ria фиг.1 схематически изображено захватное устройство с механизмом фиксации 5 на фиг. 2 - механизм фиксации захватного устройства, при нерабочем положении захватных органов на фиг.З - то же, при рабочем .положении захватных рычагов.
Устройство содержит раму 1, на . , которой шарнирно закреплены захватные рычаги 2 и механизм 3 фиксации их положения. Механизм фиксации 3 включает корпус 4, в котором выполнен вертикальный паз 5, и с возможностью перемещения установлен ползун 6 с тросом 7 для присоединения к грузоподъемному механизму шарнирными.связями 8 с верхними плечами рычагов 2.
Корпус 4 также имеет фигурную прорезь 9, вьшолненную пеТлеообразной с тремя упорными участками 10-12, расположенными в шахматном порядке. При этом на ползуне 6 шарнирно закреплена тяга 13 с пальцем 14 на свободном конце, установленном в прорез 9, а участки 10-12 смещены друг относительно друга на величину большую диаметра пальца 14. Устройство работает следующим образом. При опускании устройства на груз, ползун 6 механизма 3 фиксации находится в нижней части паза 5, а палец 14 расположен в участке 11 прорези 9. После того как рама 1 коснется поверхности груза палец 14 перемещается на участок 12. С натяжением , троса 7 палец 14 с участка 12 попадает на участок 10 прорези 9 и перемещается по нему до того момента, пока связи 8, воздействуя на рычаги 2, не обеспечат надежный захват груза. При этом палец 14 находится ввер ху участка 10 прорези 9, при опускании устройства с грузом в момент соприкосновения последнего с опорой, .палец 14 начинает двигаться вниз до конца участка 10, происходит освобож дение груза. При подъеме устройства 64 без груза палец 14 тяги 13 перемещается в участок 11 и фиксирует рычаги 2 в нерабочем положении. Формула изобретения Механизм фиксации грузозахватного устройства, содержащий корпус с фи-; гурной прорезью и подвижньш относительно него ползун с тягой, на свободном конце которой закреплен палец, установленный в прорези, отличающийся тем, что, с целью повьшения надежности его работы, корпус имеет вертикальный паз, в котором установлен ползун, а тяга связана с ним щарнирио, при этом упомянутая фигурная прорезь выполнена петлеобразной и имеет три упорных участка, расположенных в шахматном порядке, причем каждый последующий участок смещен относительно предыдущего на величину, большую диаметра пальца. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 157074, кл. В 66 С 1/44, 1962 (прототип).
ЩУ/////////////7//////////А Фиг.2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм фиксации грузозахватного устройства | 1982 |
|
SU1074804A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Механизм фиксации положения захватных рычагов грузозахватного устройства | 1987 |
|
SU1477652A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| Грузозахватное устройство | 1988 |
|
SU1594113A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
SU1837563A1 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Упорное приспособление для контакта с грузом грузозахватного устройства четырехтактного действия | 1990 |
|
SU1773845A1 |