3 Ц 15 6 5-
Фиг.1 в
Изобретение относится к автоматическим подъемно-поворотным устройствам, может быть использовано в транспортных системах автоматических линий и автоматизированных участков и является усовершенствованием изобретения по авт. св. № 1342661.
Целью изобретения является расширение технологических возможностей и повышение производительности за счет исключения холостого поворота планшайбы в исходное положение.
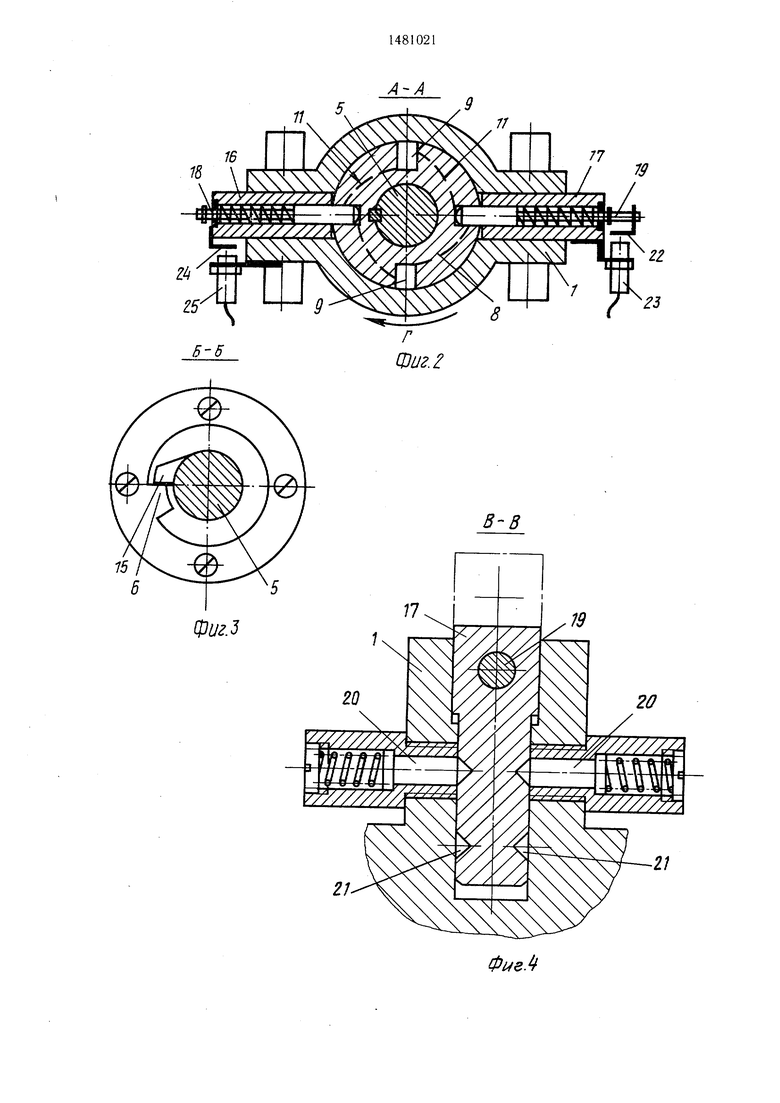
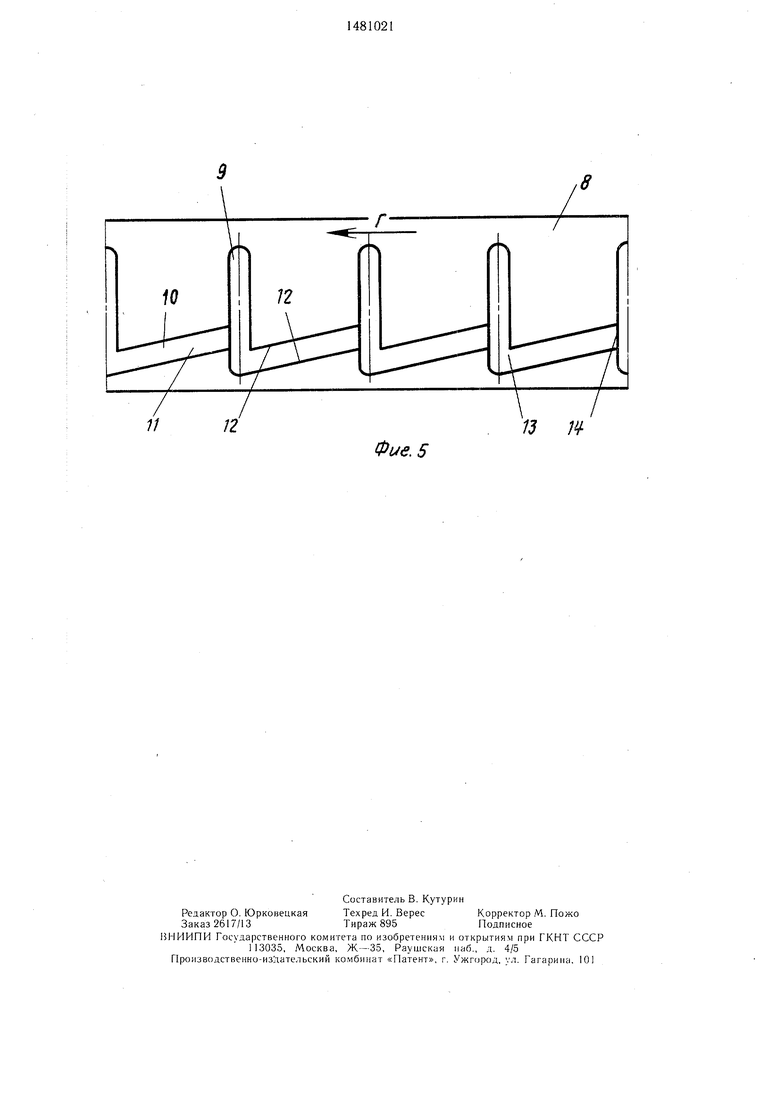
На фиг. 1 изображено устройство, разрез; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 1; на фиг. 5 - продольные и поперечные пазы на развертке наружной поверхности барабана.
Автоматическое подъемно-поворотное устройство имеет корпус 1, в котором расположен червяк 2, приводимый во вращение двигателем (не показан). С червяком 2 связано червячное колесо 3, жестко закрепленное на гайке 4, в которую ввернут вал 5 и которая имеет на верхнем торце кулачок 6. С верхним концом вала 5 связана планшайба 7 для установки груза, а между планшайбой 7 и верхним торцом гайки 4 закреплен барабан 8 с продольными и поперечными пазами 9 и 10. Продольные пазы 9 выполнены прямолинейными и соединены между собой поперечными пазами 10, расположенными на нижнем конце барабана 8 последовательно друг за другом Дно 11 и стенки 12 пазов 10 выполнены соответственно по спиральной и винтовой линиям, при этом соединяющий продольные пазы 9 вход 13 и выход 14 пазов 10 смешены на заданную величину, необходимую для перекрытия выхода 14 пазов 10 противоположной стенкой продольных пазов 9. В средней части вала 5 рядом с его винтовой частью расположен кулачок 15, отстоящий от кулачка 6 гайки 4 на расстояние /г, равное величине хода вала 5. В отверстиях корпуса 1 расположены подвижные в направлении оси барабана 8 ползушки 16 и 17, в которых смонтированы подпружиненные плунжеры 18 и 19, контактирующие с пазами 9 и 10 барабана 8. Ползушки 16 и 17 имеют возможность передвижения на заданную величину и фиксации в конечных положениях при помощи подпружиненных фиксаторов 20, входящих в углубления 21. На противоположном конце плунжера 19 закреплен шунт 22, взаимодействующий с датчиком 23, а на ползуш- ке 16 закреплен шунт 24, взаимодействующий с датчиком 25
5
0
5
0
Устройство работает следующим образом. Червяк 2, получая вращение от двигателя, передает его червячному колесу 3, вместе с которым вращается гайка 4. При вращении гайки 4 начинает подниматься вал 5, который от проворота удерживается плунжерами 18 и 19, входящими в продольные пазы 9 барабана 8. Подъем вала 5 происходит до тех пор, пока кулачок 6 гайки 4 не упрется в кулачок 15 вала 5. Далее происходит совместный поворот вала 5 и гайки 4 в направлении стрелки 7, а следовательно, и поворот планшайбы 7 вместе с грузом. К этому моменту плунжеры 18 и 19 сходят с продольных пазов 9 барабана 8 и дают возможность последнему повернуться на заданный угол. При повороте барабана 8 в направлении стрелки Г он спиральным дном 11 выжимает плунжеры 18 и 19 к своей наружной поверхности и одновременно винтовой стенкой 12 поднимает плунжеры 18 и 19, которые, в свою очередь, передвигают ползушки 16 и 17 на заданную величину, после чего последние фиксируются от смещения подпружиненными фиксаторами 20, входящими в углубления 21. В конце поворота плунжеры 18 и 19 заскакивают в следующие продольные пазы 9 барабана 8, при этом плунжер 19 своим шунтом 22 включает датчик 23, который подает команду на реверс двигателя. Гайка 4 начинает вращаться в обратном направлении, и вал 5,
0 удерживаемый от проворота плунжерами 18 и 19, начинает опускаться. В конце опускания вала 5 торец барабана 8 нажимает на ползушки 16 и 17 и передвигает их в исходное (нижнее) положение, где они фиксируют- ся и удерживаются от смещения подпру5 жиненными фиксаторами, входящими в следующие углубления 21. Опускание вала 5 происходит до тех пор, пока шунт 24 закрепленный на ползушке 16,не включит дат чик 25, который подает команду на выключение двигателя. На этом цикл работы автоматического подъемно-поворотного устройства завершается.
5
0
Формула изобретения
Автоматическое подъемно-поворотное устройство по авт. св. № 1342661, отличающееся тем, что, с целью расширения технологических возможностей и повышения производительности, поперечные пазы барабана выполнены по винтовой линии, а подпружиненные плунжеры установлены с возможностью перемещения вдоль оси планшайбы.
сч
о
оо
тС
р
м
ь «о
Ј
to
г
8
Фие.5
13 W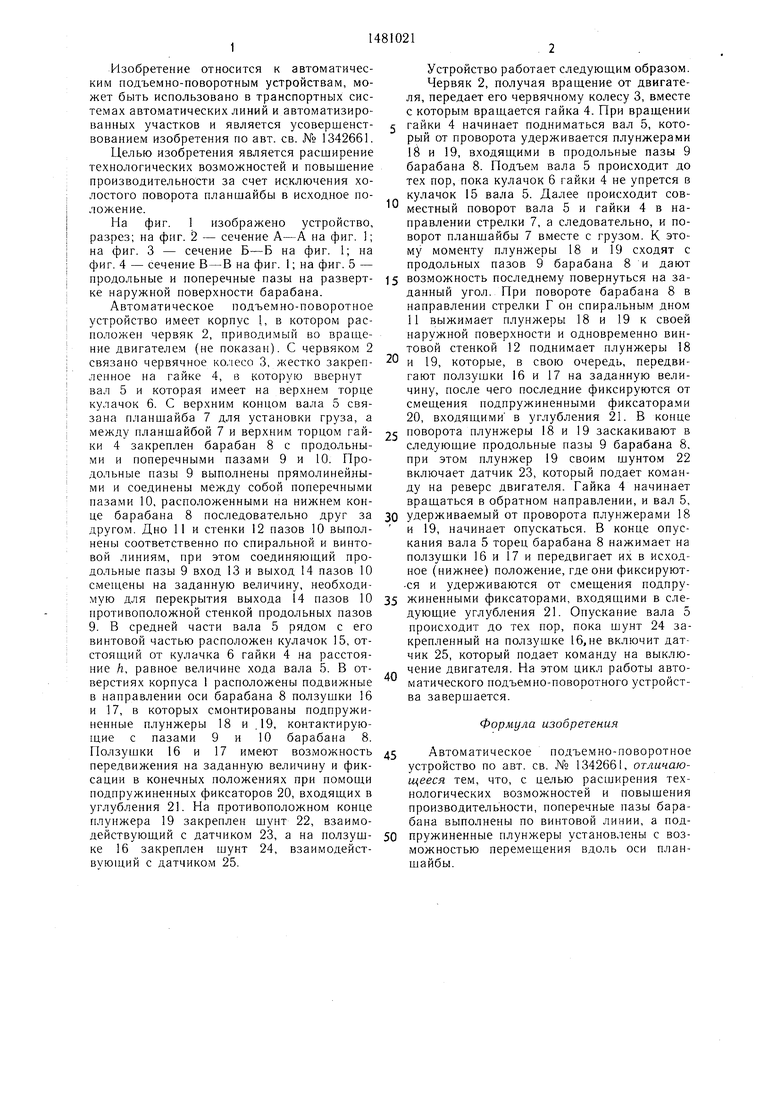
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое подъемно-поворотное устройство | 1986 |
|
SU1342661A2 |
| Автоматическое подъемно-поворотное устройство | 1985 |
|
SU1301652A1 |
| Гибкая автоматизированная система | 1987 |
|
SU1562107A1 |
| Автоматическое подъемно-поворотное устройство | 1976 |
|
SU544533A2 |
| Агрегат для непрерывной намотки на упоры форм преднапряженной арматуры | 1984 |
|
SU1213159A1 |
| Делительное устройство | 1984 |
|
SU1220732A1 |
| Автоматическое подъемно-поворотное устройство | 1988 |
|
SU1548011A2 |
| Приводное устройство план-шайбы поворотно-делительного стола | 1976 |
|
SU663544A1 |
| Передвижной кабестан | 1988 |
|
SU1581687A1 |
| ФРЕЗЕРНЫЙ СТАНОК | 1969 |
|
SU252049A1 |
Изобретение относится к автоматическим подъемно-поворотным устройствам, используемым в транспортных системах автоматических линий и автоматизированных участков. Целью изобретения является расширение технологических возможностей и повышение производительности за счет исключения холостого поворота планшайбы в исходное положение. При вращении гайки 4 вал 5 начинает подниматься вместе с планшайбой 7 до тех пор, пока кулачок 6 гайки 4 не упрется в кулачок 15 вала 5. Далее происходит совместный поворот вала 5, гайки 4 и планшайбы 7. Одновременно плунжеры 18 и 19 отжимаются и поднимаются вверх, контактируя с поперечными пазами 10, выполненными по винтовой линии. В конце поворота плунжеры 18 и 19 заскакивают в следующие продольные пазы 9 барабана 8. Двигатель реверсируется, при этом вал 5, удерживаясь от проворота плунжерами 18 и 19, начинает опускаться. 5 ил.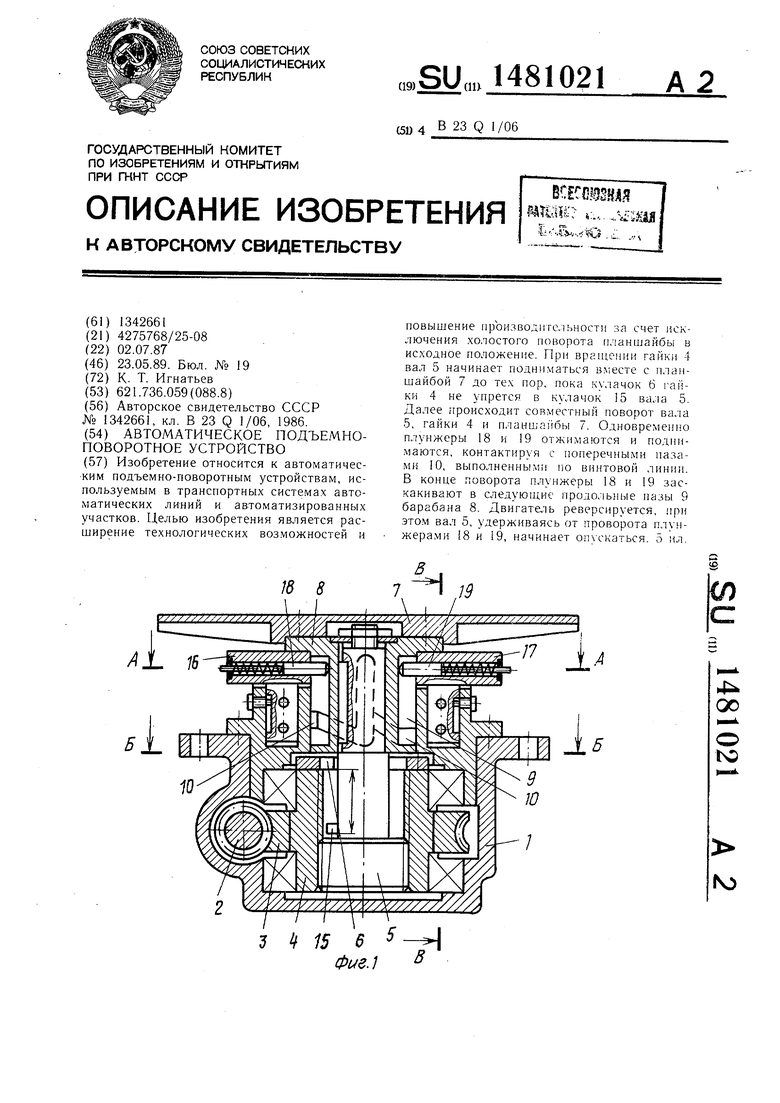
| Автоматическое подъемно-поворотное устройство | 1986 |
|
SU1342661A2 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
