3-
Изобретение относится к машиностроению и может быть использовано захватных устройствах руки промышленых роботов или манипуляторов.
Цель изобретения - обеспечение универсальности устройства и увеличение рабочего диапазона захватного устройства.
На фиг.1 изображено устройство, настроенное для захвата валов, общи вид; на фиг.2 - то же, настроенное для захвата фланцев; на фиг.З - сечние А-А на фиг.2; на фиг.4 - механи регулирования угла; на фиг.З - накладка, сечение; на фиг.6 - сечение Б-Б на фиг.З.
Захватное устройство состоит из шарнирного параллелограмма I с тя
Для захвата деталей типа фланцев раскрытие и закрытие частей 11 рычагов происходит аналогично описанному. Но ввиду того, что захват детали выполняется по одной неступенчатой погой 2 от привода и с зубчатыми рейка- 2д верхности и парные параллельные час30
35
ми 3. Две пары частей 4 рычагов свободно посажены на оси 5, а своими зубчатыми секторами а сцеплены с рейками 3. К частям 4 осевыми валиками 6 и 7 крепятся части 8 рычагов 25 для захвата валов или осевыми валиками 9 и 10 крепятся части 11 рычагов для захвата фланцев. Осевые валики 9 и 10 одновременно жестко связывают одну с другой параллельные части 4.
Части 8 и 1I имеют механизм регулировки угла их углового положения, состоящий из водила 12, свободно посаженного на осевой валик 6 или 10, и винта 3, который своими буртиками заведен на упорную плоскость паза, выполненного на частях 8 или 11, а затем ввинченного в резьбовое гнездо водила 12. На частях 8 или 11 рычагов по скользящей посадке надеты накладки 14 и закреплены болтами. Накладки 15 в виде носка на части 11 также надеты и зафиксированы штифтами 16 по скользящей посадке, а закреплены болтами 17 так, что головка и гайка болта предотвращают выпадание штифта.
Рабочая поверхность накладок 14 и 15 выполнена по форме и размерам захватываемой детали 18. В зависимости от обслуживаемых деталей на частях 4 закрепляют части 8 или 11 рычагов, а на них - соответствующие йакладки 14 и 15.
Захватное устройство работает следующим образом.
Для захвата деталей типа валов тяга 2 перемещается вниз и части 8 рычагов раскрываются. Затем тяга 2
40
45
50
ти 4 рычагов связаны осевыми валиками 6 и 7 , раскрытие выполняется только двух частей 11. Деталь захватывает ся так, чтобы ее выступающая часть бы ла направлена от захватного устройства для подачи ее в зажимное устройство токарного станка (фиг.2).
Если захватываемые детали имеют незначительный диаметр и их межосевое расстояние в таре не позволяет полностью раскрыться рычагами в момент захвата, при вывинчивании винта 13 водило 12 и рычаг поворачиваются в противоположных направлениях и угол раскрытия губок, а следовательно,наружный габарит раскрытого захватного устройства уменьшаются.
Формула изобретения
1.Захватное устройство, содержащее губки и реечный механизм, зубчаты секторы которого выполнены на поворотных рычагах, свободно установленных на оси, а рейки связаны рычагами, образующими шарнирный параллелограмм, отличающееся тем, что, с целью обеспечения универсальности уст ройства, поворотные рычаги выполнены из двух частей, одна из которых имеет зубчатый сектор, а другая несет губки при этом1 части рычагов с зубчатыми секторами имеют возможность жесткого скрепления одна с другой.
2.Устройство по п.1, о т л и - чающееся те, что, с целью расширения технологических возможностей путем увеличения рабочего диапа0
5
перемещается вверх, и части 8 закрываются, захватывая деталь. Если вал имеет ступенчатую поверхность, тогда на ступени вала с большим диаметром две части 8 захватывают деталь раньше, а на ступени с меньшим диаметром две части 8 за счет смещения шарнирного параллелограмма продолжают закрываться до захвата детали. Для освобождения детали тяга 2 перемещается снова вниз, и обе пары частей 8 рычагов раскрываются до установочного предела.
Для захвата деталей типа фланцев раскрытие и закрытие частей 11 рычагов происходит аналогично описанному. Но ввиду того, что захват детали выполняется по одной неступенчатой под верхности и парные параллельные час0
5
5
0
5
0
ти 4 рычагов связаны осевыми валиками 6 и 7 , раскрытие выполняется только двух частей 11. Деталь захватывается так, чтобы ее выступающая часть была направлена от захватного устройства для подачи ее в зажимное устройство токарного станка (фиг.2).
Если захватываемые детали имеют незначительный диаметр и их межосевое расстояние в таре не позволяет полностью раскрыться рычагами в момент захвата, при вывинчивании винта 13 водило 12 и рычаг поворачиваются в противоположных направлениях и угол раскрытия губок, а следовательно,наружный габарит раскрытого захватного устройства уменьшаются.
Формула изобретения
1.Захватное устройство, содержащее губки и реечный механизм, зубчатые секторы которого выполнены на поворотных рычагах, свободно установленных на оси, а рейки связаны рычагами, образующими шарнирный параллелограмм, отличающееся тем, что, с целью обеспечения универсальности устройства, поворотные рычаги выполнены из двух частей, одна из которых имеет зубчатый сектор, а другая несет губки, при этом1 части рычагов с зубчатыми секторами имеют возможность жесткого скрепления одна с другой.
2.Устройство по п.1, о т л и - чающееся те, что, с целью расширения технологических возможностей путем увеличения рабочего диапа
W
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| Захватное устройство манипулятора | 1985 |
|
SU1306711A1 |
| Манипулятор | 1985 |
|
SU1313691A1 |
| Захватное устройство | 1985 |
|
SU1283092A1 |
| Захват манипулятора | 1986 |
|
SU1313701A1 |
| Захватное устройство | 1986 |
|
SU1323371A1 |
| Захватное устройство | 1986 |
|
SU1430261A1 |
| Захватное устройство | 1984 |
|
SU1227465A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Схват промышленного робота | 1986 |
|
SU1371903A1 |
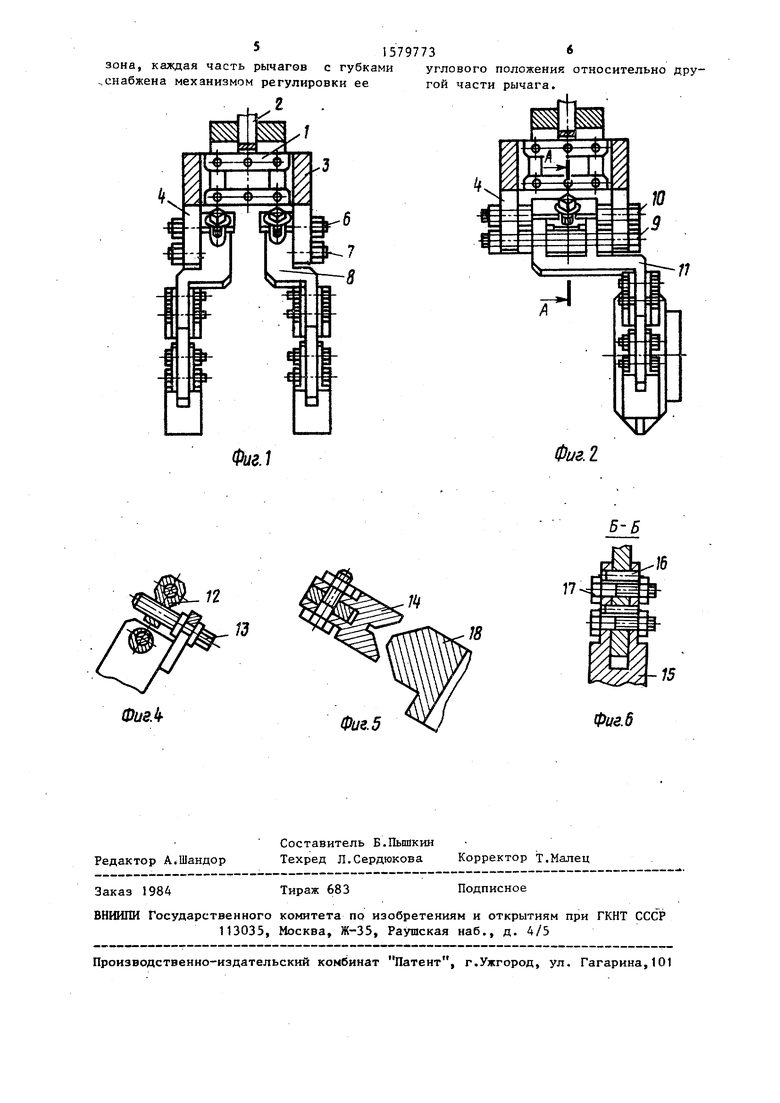
Изобретение относится к машиностроению и может быть использовано в захватных устройствах руки промышленного робота или манипулятора. Цель изобретения - обеспечение универсальности устройства и увеличение рабочего диапазона захватного устройства. Устройство содержит шарнирный параллелограмм с зубчатыми рейками 3 и рычаги для захвата деталей. Рычаги для захвата деталей выполнены из двух частей. Часть 4 рычагов имеет зубчатый сектор, находящийся в зацеплении с рейкой 3, а часть 8 или 11 несет губки. В случае захвата детали типа ступенчатого валика часть 4 рычагов связана с частью 8 рычагов. Если осуществляется захват детали типа фланца, то части 4 рычагов жестко связываются между собой и используется только одна часть 11 рычагов. Части 8 и 11 снабжены механизмом регулировки их углового положения. Это позволяет увеличить рабочий диапазон устройства. 1 з.п. ф-лы, 6 ил.
Фиг.1
П
ФиеЛ
Фие.5
Редактор А.Шандор
Составитель Б.Пышкин Техред Л.Сердюкова
Заказ 1984
Тираж 683
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Фиг. I
ПФиг. 6
Корректор Т.Малец
Подписное
| Захват самоцентрирующий | 1984 |
|
SU1201127A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
