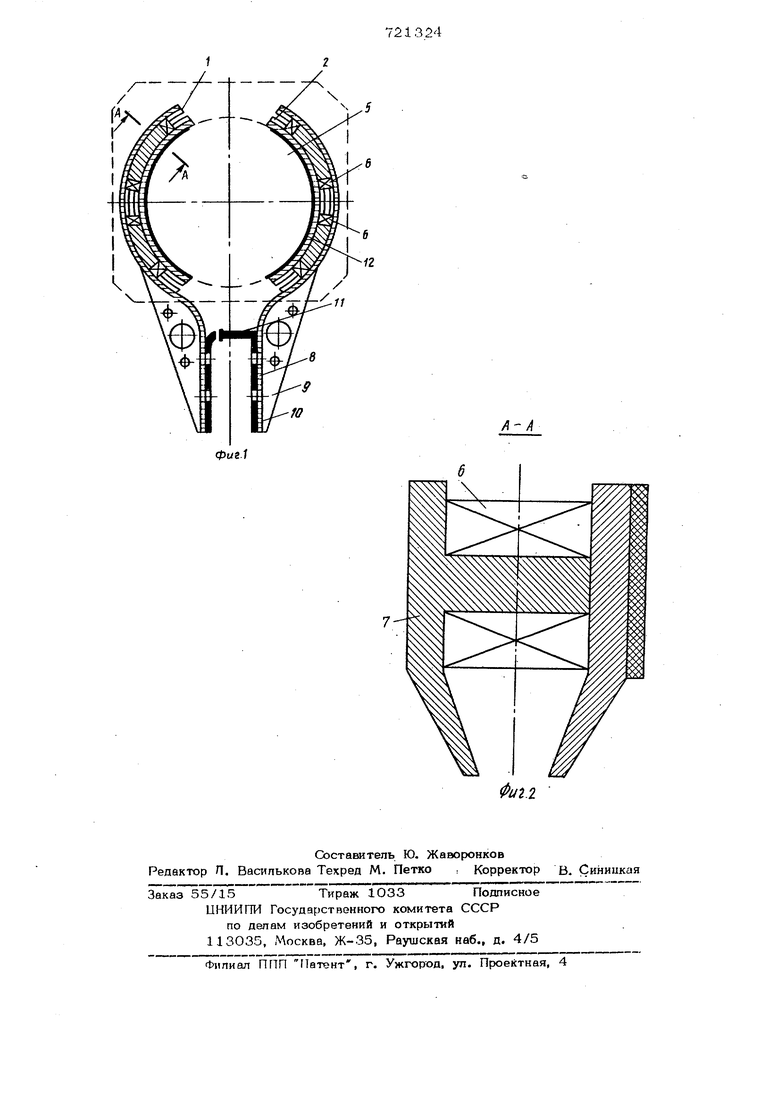
Изобретение относится к области автоматизации листоштамповочного произ водства и может быть использовано для отделения плоских заготовок от стопы и подачи их в рабочую зону штампа, а также удаления из рабочей зоны штампа деталей типа стакана и плоских отходов. Известен захватный орган манипулято ра, содержащий закрепленные на кисти руки манипулятора подвижные одна относительно другой захватные губки для зах вата деталей типа стакана flj. Недостатком известного ёахватного органа является невозможность, помимо захвата деталей типа стакана, также надежного захвата плоских заготовок или отходов с верхней и нижней плит штампа Обеспечение возможности надежнотх) захвата плоских заготовок или отходов с вер ней и нижней плит штампа цостигается в предлагаемом oprarie тем, что захватные губки иычолнены в виде электромагнитов сердечники которых имеют И-обрааную форму. Параллельные стенки И-образного сердечника могут быть снабжены наклонными участками, наклоненными во встречном один относительно другого направлении. На фиг. 1 изображен предлагаемый захватный орган, обший вид; на фиг. 2 разрез по А-А на фиг. 1. Захватный орган манипулятора содержит захватные губки 1 и 2, выполненные в виде электромагнитов 3 и 4. ектро- магниты 3 и 4 изогнуты по периметру захватываемой детали 5. Обмотка 6 электромагнитов 3 и 4 выполнена бескаркасной. Сердечники 7 электромагнитов выполнены И-образной формы (фиг. 2). Нижняя часть сердечника 7 со стороны зеркала матрицы (нижней части штампа) выполнена С-образной формы (с выступами, наклоненньпли один навстречу другому). Такое выполнение части сердечника электромагнитов 7 позволяет создать достаточное тяговое усилие в единице объема и сконцентрировать магнит ное поле в малом объеме, т. е. форма нижней части сердечШтка 7 позволяет увеличить -градаент магнитного поля где И - напряженность магнитного поля, § - расстояние между заготовкой и торцем И-образного сердечника. Кроме того, такое выполнение нижней части Pi-образного сердечника 7 обеспечивает надежный захват плоских заготовок, а при отделении верхней заготовки из стопы предотвращает притягивание нижележащей заготовки. Качество поверхности листовых заготовок при выбранной форме нижней части сердечника 7 существенно не влияет на тяговое усилие элекгромагнита. Захватные губки 1 и 2 крепятся к кисти руки манипулятора (не показан) планками 8 с ребрами 9 жесткости. Между планками 8 и кистью руки манипулятора установлена изолирующая прокладка 1О, и датчик И наличия детали 5 типа стакана. На внутренней поверхности захватных губок 1 и 2 закреплены резиновые, прокладки 12 для повышения коэффициента трения между внутренней поверх костью захватных губок 1 и 2 и деталью Захватный орган манипулятора работает следующим образом. Захватные губки 1 и 2 опускают ся - на стону плоских заготовок до соприкосновения с верхней заготовкой. Затем захватные губки 1 и 2 приводятся в движение одна навстречу другой, воздействуют на датчик 11, который дает сигнал на подачу электротока в обмотки 6 электромагнитов 3 и 4. Магнитное поле захватных губок 1 и 2 удерткивает заготовку, которую перемещают в рабочую зону штампа. После окончания щтамповочной операции рука манипулятора подводит захватные губю I и 2 к детали 5 и осуществляет ее захват. При этом также срабатывает дат чик 11, подающий напряжение на электро магниты 3 и 4, магнитное поле которых притягивает кольцевой отход, который ле жит на матрица штампа (не показана). Далее деталь 5 и кольцевой отход транспортируют к месту складирования. Если кольцевой отход прилипает к пуансону, то отлипатель при подъеме последнего сбросит отход на захватные губки 1 и 2. В этом случае фиксация отхода на захватных губках 1 и 2 осуществляется вверхней частью электромагнитов 3 и 4. Р процессе транспортирования осуществпяется контроль наличия кольцевого отхода и детали 5 в захватных губках 2 и 3. Во всех аварийных случаях при невозможности захвата детали 5, заготовок и кольцевых отходов датчики контроля подают команду системе управления манипулятора на останов. Применение предлагаемой конструкции захватного органа позволит сократить время рабочего цикла на благодаря одновременному удалению .отштампованного изделия и кольцевых отходов независимо от их положения. Для питания электромагнитов захватного органа используется стандартное бортовое напряжение манипулятора. Предлагаемый орган обладает простотой конструкции, обслуживания и высокой надежностью. . Формула изобретения 1. Захватный орган манипулятора,содержащий закрепленные на кисти манипулятора подвижные одна относительно дру1Х)й захватные губки для захвата деталей типа стакана, отличающийся тем, что, с целью обеспечения возможТИстн надежного захвата плоских заготовок или отходов с верхней и нижней плит щтампа, захватные губки выполнены в М1де электромагнитов, сердечники которых имеют И-образную форму. 2. Захватный орган по п. 1, о т л и чающийся тем, что параллельные стенки И-образного сердечника снабжены с одной сторони наклонными участками, наклоненными во встречном один относительно другого направлении. Источники информатши, принятые во внимание при экспертизе I. Авторское свидетельство СССР № 529286, кл. В 25 Т 15/ОО, 1975 (прототип).
Ю
А-А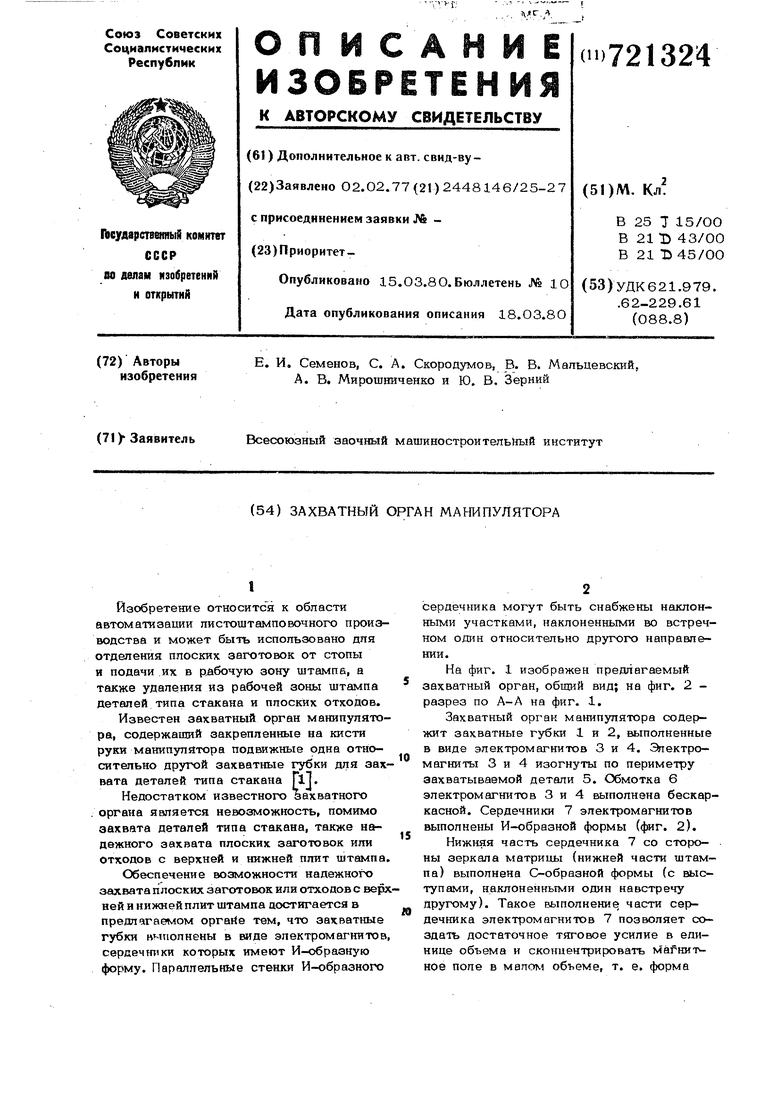
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватный механизм манипулятора | 1976 |
|
SU647104A1 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1977 |
|
SU682392A2 |
| Устройство для подачи заготовок в рабочую зону штампа | 1983 |
|
SU1097417A1 |
| Устройство для управления схватом промышленного робота | 1980 |
|
SU894666A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Захватное устройство | 1988 |
|
SU1632585A1 |
| Устройство для загрузки и удаления деталей | 1982 |
|
SU1015995A1 |
| Установка для автоматической штамповки | 1980 |
|
SU867671A1 |