При этом ХП 1 установлен с возможностью взаимодействия с фиксатором 12, взаимодействуюи1им с коромыслом 16. Кроме того, конвейер снабжен Д 14, а подвеска 4 - переставными адресователями (А) 13 с возможносты их взаимодействия. Каретки 3 с подвесками 4 перемещаются по ХП 1 тяговым органом Подвески 4 загружают грузом 20. затем устанавливают в требуемое положение А 13. При взаи
модействии А 13 с Д 14 поступает сигнал на электромагнит, и коромысле 16 ударяет по фиксатору 12, который освобождает платформу 11, под собственным весом и весом груза 20 поворачивающуюся вокруг оси 17, и груз 20 перемещается на склиз 8. При этом Д 9 и 10 фиксируют наличие груза 20 на склизе 8. В исходное положение платформа 11 возвращается автоматически. 1 з.п. ф-лы, 3 ил.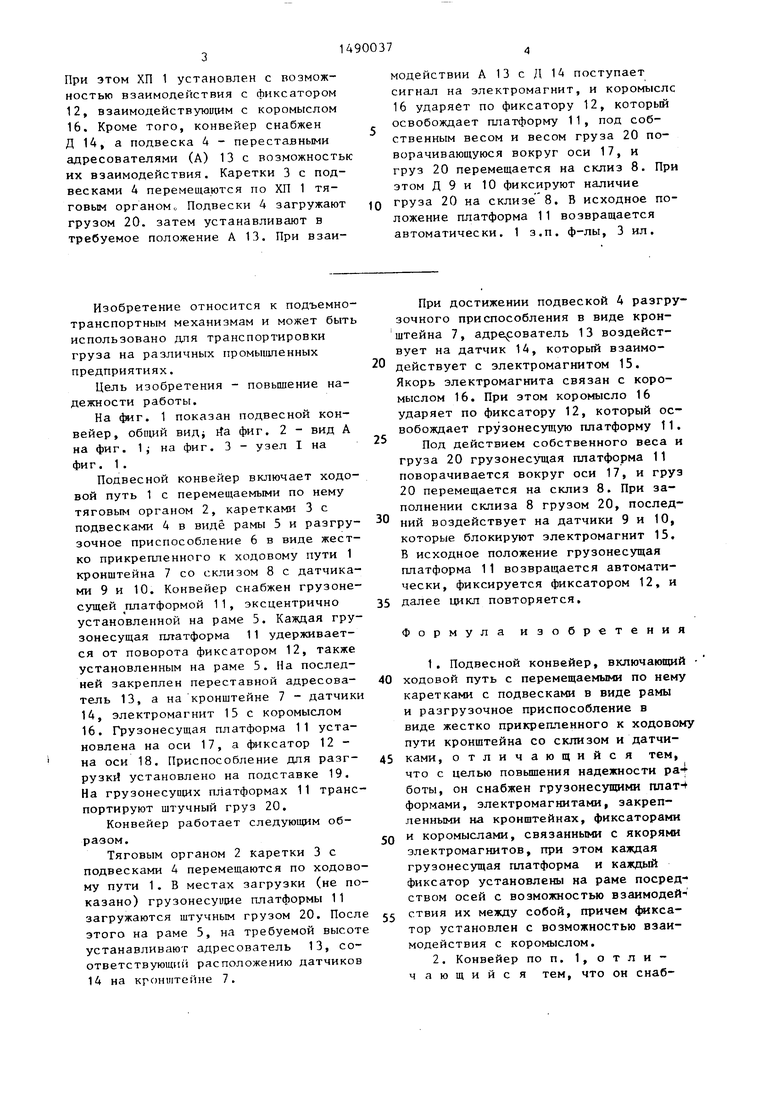
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной конвейер | 1989 |
|
SU1738730A1 |
| Устройство для загрузки подвесного конвейера | 1982 |
|
SU1079560A1 |
| Подвесной грузонесущий конвейер | 1987 |
|
SU1433875A1 |
| Подвесной грузонесущий конвейер | 1986 |
|
SU1330047A1 |
| Подвеска грузонесущего конвейера | 1981 |
|
SU967888A1 |
| Транспортная система | 1981 |
|
SU992351A1 |
| Подвеска подвесного конвейера | 1983 |
|
SU1146245A1 |
| Подвеска грузонесущего конвейера | 1978 |
|
SU685578A1 |
| Подвесной конвейер | 1990 |
|
SU1756232A1 |
| СПОСОБ ЗАГРУЗКИ И ВЫГРУЗКИ АВТОМОБИЛЯ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ С ОППОЗИТНЫМ РАСПОЛОЖЕНИЕМ ЯЧЕЕК ХРАНЕНИЯ ОТНОСИТЕЛЬНО ШАХТЫ ПОДЪЕМНИКА И АВТОСТОЯНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2120528C1 |
Изобретение относится к подъемно-транспортным механизмам. Цель изобретения - повышение надежности работы. Подвесной конвейер включает ходовой путь (ХП) 1, тяговый орган, каретки 3 с подвесками 4 в виде рамы 5 и разгрузочного приспособления в виде жестко закрепленного на ХП 1 кронштейна 7 со склизом 8 и датчиками (Д) 9 и 10. Конвейер снабжен грузонесущей платформой 11 с фиксатором 12 и коромыслом 16. Коромысло 16 связано посредством электромагнита 15 с разгрузочным приспособлением. При этом ХП 1 установлен с возможностью взаимодействия с фиксатором 12, взаимодействующим с коромыслом 16. Кроме того, конвейер снабжен Д 14, а подвеска 4 - переставными адресователями (А) 13 с возможностью их взаимодействия. Каретки 3 с подвесками 4 перемещаются по ХП 1 тяговым органом. Подвески 4 загружают грузом 20, затем устанавливают в требуемое положение А 13. При взаимодействии А 13 с Д 14 поступает сигнал на электромагнит, и коромысло 16 ударяет по фиксатору 12, который освобождает платформу 11, под собственным весом и весом груза 20 поворачивающуюся вокруг оси 17, и груз 20 перемещается на склиз 8. При этом Д 9 и 10 фиксируют наличие груза 20 на склизе 8. В исходное положение платформа 11 возвращается автоматически. 1 з.п. ф-лы, 3 ил.
Изобретение относится к подъемно- транспортным механизмам и может быть использовано для транспортировки груза на различных промышпенных предприятиях.
Цель изобретения - повышение надежности работы.
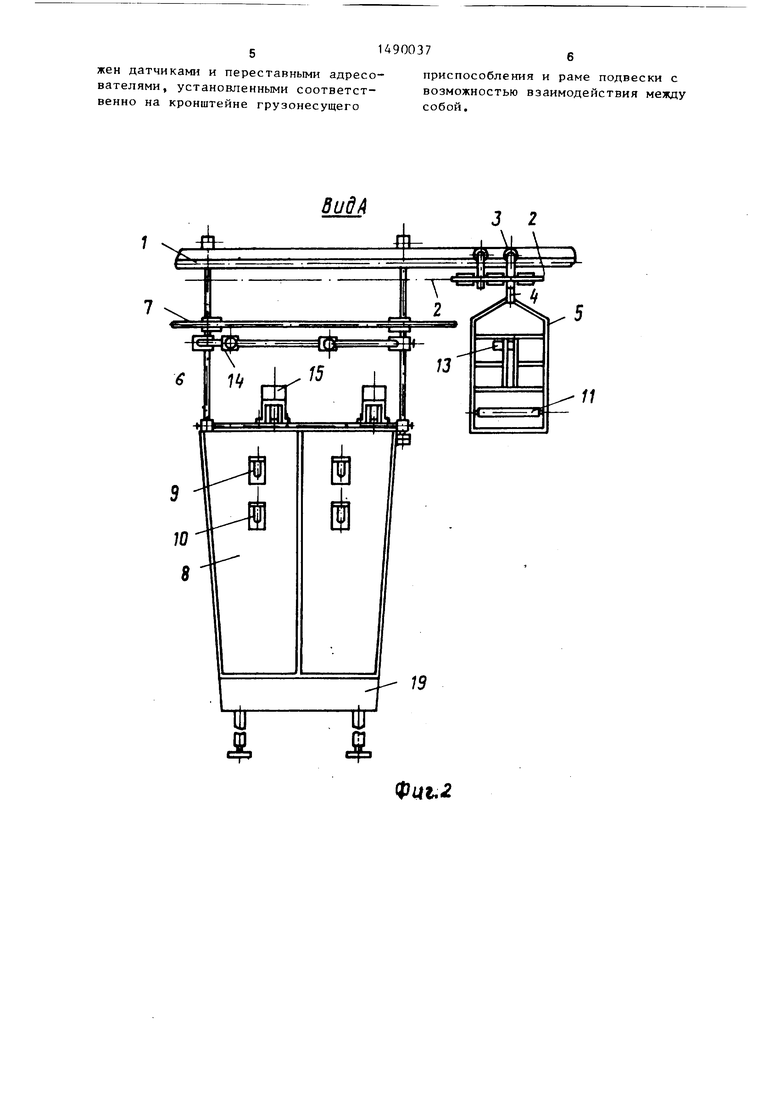
На фиг. 1 показан подвесной конвейер, o6DUift вид rfa фиг. 2 - вид А на фиг. 1j на фиг. 3 - узел I на фи г . 1 .
Подвесной конвейер включает ходовой путь 1 с перемещаемыми по нему тяговым органом 2, каретками 3 с подвесками 4 в виде рамы 5 и разгрузочное приспособление 6 в виде жестко прикрепленного к ходовому пути 1 кронштейна 7 со склизом 8 с датчиками 9 и 10. Конвейер снабжен грузоне- сущей платформой 11, эксцентрично установленной на раме 5. Каждая гру- зонесущая платформа 11 удерживается от поворота фиксатором 12, также установленным на раме 5. На последней закреплен переставной адресова- тель 13, а на кронштейне 7 - датчики 14, электромагнит 15 с коромыслом 16. Грузонесущая платформа 11 установлена на оси 17, а фиксатор 12 - на оси 18. Приспособление для разгрузки установлено на подставке 19. На грузонесущих платформах 11 транспортируют штучный груз 20.
Конвейер работает следующим образом.
Тяговым органом 2 каретки 3 с подвесками 4 перемещаются по ходовому пути 1. В местах загрузки (не показано) грузонесуише платформы 11 загружаются штучным грузом 20. Посл этого на раме 5, на требуемой высот устанавливают адресователь 13, соответствующий расположению датчиков 14 на кронштеГше 7.
0
5
0
5
При достижении подвеской 4 разгрузочного приспособления в виде крон- щтейна 7, адресователь 13 воздействует на датчик 14, который взаимодействует с электромагнитом 15. Якорь электромагнита связан с коромыслом 16, При этом коромысло 16 ударяет по фиксатору 12, который освобождает грузонесутцую платформу 11.
Под действием собственного веса и груза 20 Грузонесущая платформа 11 поворачивается вокруг оси 17, и груз 20 перемещается на склиз 8. При заполнении склиза 8 грузом 20, последний воздействует на датчики 9 и 10, которые блокируют электромагнит 15. В исходное положение Грузонесущая платформа 11 возвращается автоматически, фиксируется фиксатором 12, и далее цикл повторяется.
Формула изобретения
1,Подвесной конвейер, включающий ходовой путь с перемещаемыми по нему
каретками с подвесками в виде рамы и разгрузочное приспособление в виде жестко прикрепленного к ходовому пути кронштейна со склизом и датчиками, отличающийся тем, что с целью повьппения надежности ра4 боты, он снабжен грузонесущими ппатч формами, электромагнитами, закреп- ленньми на кронштейнах, фиксаторами
и коромыслами, связанными с якорями электромагнитов, при этом каждая Грузонесущая платформа и каждый фиксатор установлены на раме посредством осей с возможностью взаимодей-i
ствия их между собой, причем фиксатор установлен с возможностью взаимодействия с коромыслом.
видА
6
приспособления и раме подвески с возможностью взаимодействия между собой.
19
Фаг.2
«С
фиг.З
| Подвесной грузонесущий конвейер | 1979 |
|
SU785137A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Ланкин Ю.П | |||
| и др | |||
| Перегрузочные устройства | |||
| Л.: Маииностроение, 1984, с | |||
| Способ получения продукта конденсации бетанафтола с формальдегидом | 1923 |
|
SU131A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Ю | |||
