Изобретение относится к машиностроению и может быть иcпoл Jзoвaнo в конструкциях приводов манипуляторов.
Цель изобретения - расширение тех- нологических возможностей и повьпиение производительпости.
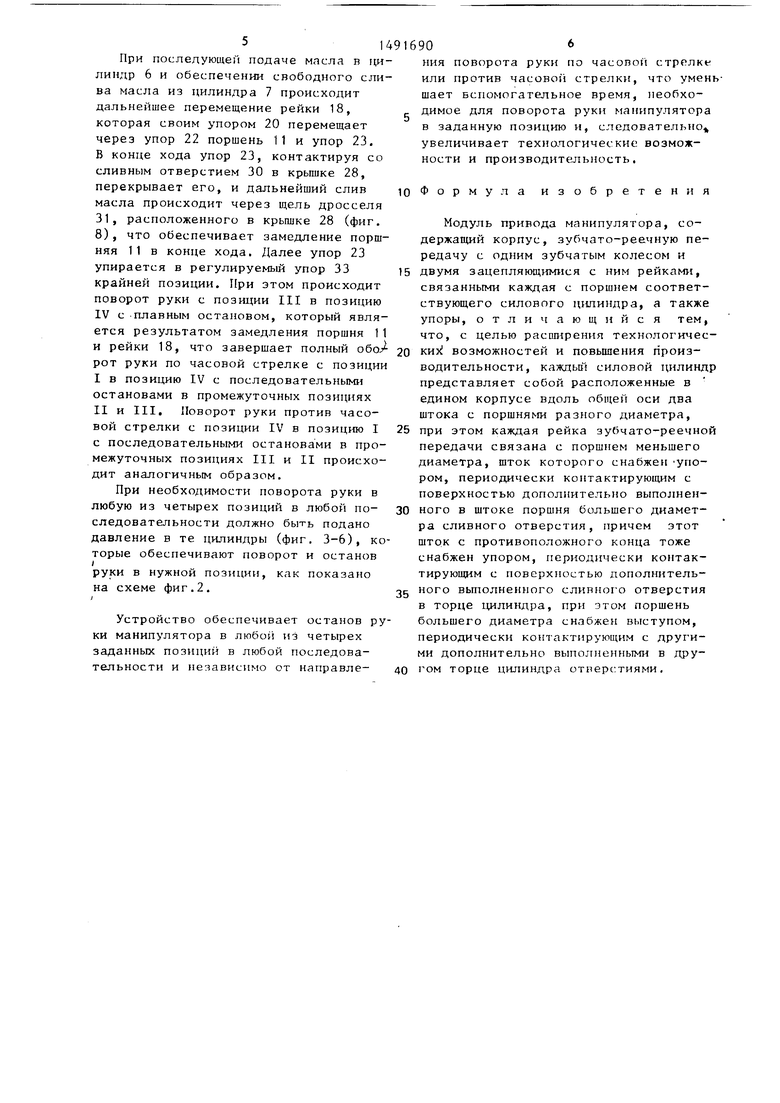
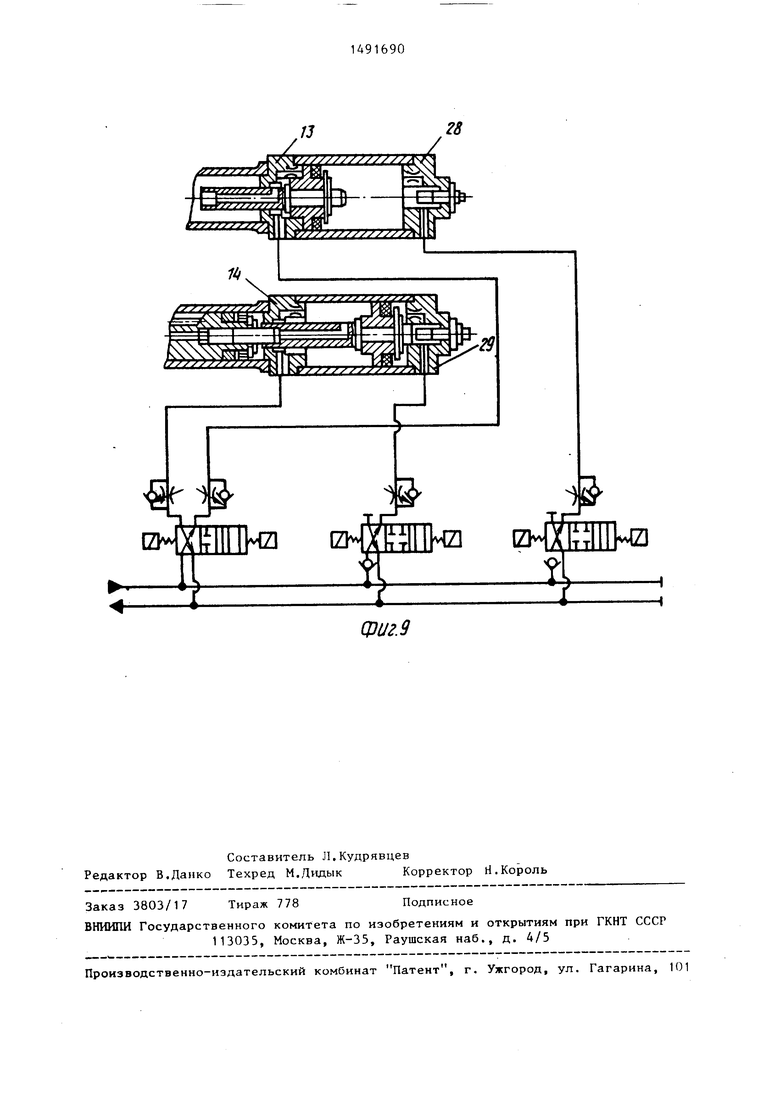
На фиг. 1 показан,модуль привода манипулятора, общий вид на фиг. 2 - возможное положение руки в любой по- зиции из четырех; на фиг. 3 - схема положений поршней силовых цилиндров, соответствующих положению руки в позиции I по фиг, 2; на фиг. 4 - то же в позиции II на фиг. 2 на фиг. 3 - то же, в позиции III на фиг. 2; на фиг. 6 - то же, в позиции IV на фиг. 2 на фиг, 7 - фрагмент фиг. 1 с соединительным фланцем и дросселем; на фиг. 8 - фрагмент фиг. 1 с крыш- кой и дросселем; на фиг. 9 - гидросхема модуля привода манипулятора.
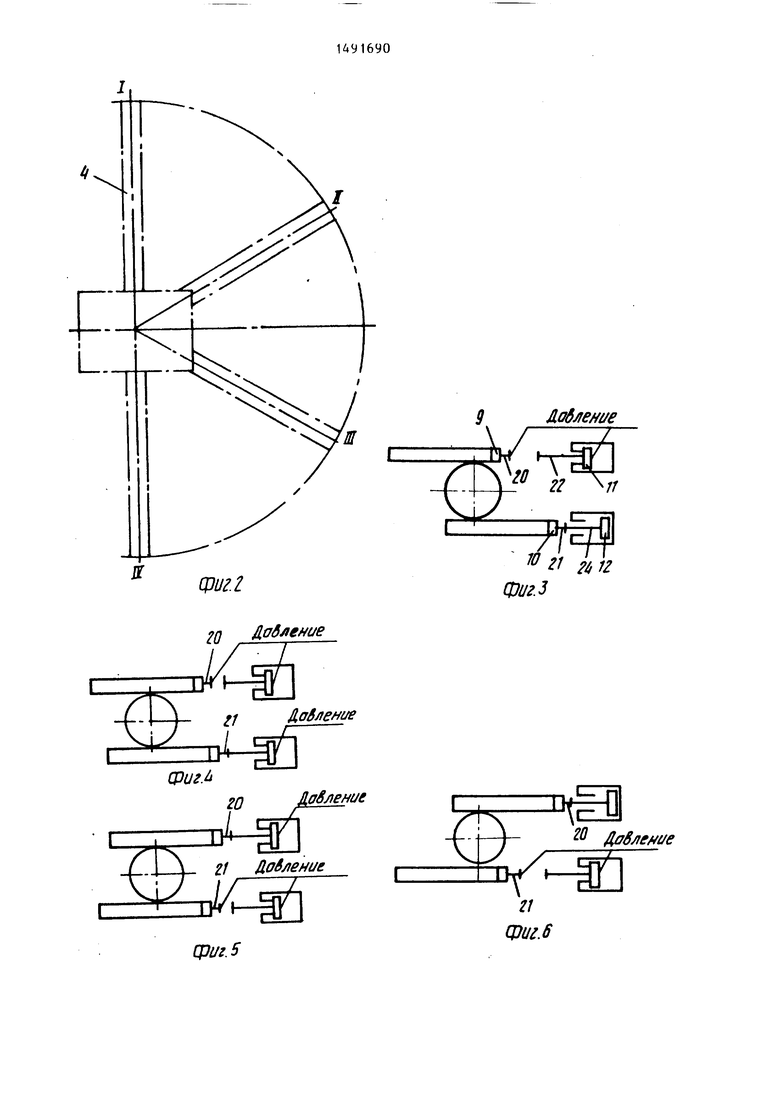
В корпусе 1 манипулятора установлена зубчато-реечная передача с при- водом от двух сдвоенных силовых цилиндров, содержащая зубчатое колесо 2, связанное с вертикальным валом 3, на котором закрегшена рука 4 манипулятора (фиг. 1). Каждый сдвоен}1ый силовой цилиндр включает в себя два силовых цилиндра 5, 6 и 7, 8 одностороннего действия с разными диаметрами порщней 9, 10 и 11, 12. При этом цилиндры 5 и 7, 6 и В связаны друг с другом через соединительные фланцы 13 и 14, имеющие сливные отверстия 15 и дроссели 16 и 17 (фиг. 7). Рейки 18 и 19 зубчато-реечной передачи прикреплены к поршням 9 и 10 мень шего диаметра, снабженным жесткими упорами 20 и 21, промежуточного положения руки 4. Каждый поршень 11 и 12 большего диаметра снабжен соосно расположенными по обе стороны от поршня жесткими упорами 22-25 и выступом 26, Упоры 20 и 21 периодически контактируют со сливными oтнepcтия tи 27, выполненными в упорах 22 и 24. В крьппках 28 и 29 силовых цилиндров 7 и 8, имеющих сливное отверстие 30 и дроссели 31 и 32 (фиг. 8), закреплены регулируемые упоры 33 и 34 крайних позиций положения руки 4 с возможностью периодического взаимодействия с упорами 23 и 25 поршней 11 и 12.
Модуль привода работает следующим образом.
Q
0
5
При подаче масла в цилиндр 8 большего диам(тра и в цилиндр 5 меньшего диаметра за счет разности развиваемых усилий происходит перемещение поршня 12 большего диаметра.В конце хода выступ 26 поршня 12, контактируя со сливным отверстием 15 во фланце 14, перекрывает его, и дальнейший слив масла происходит через щель дросселя 17, расположенного во фланце 14 (фиг. 7), что обеспечивает замедление поршни 12 в конце хода. Далее поршень 12 упирается в соединительный фланец 14.
В процессе перемещения поршень 12 перемещает своим упором 24 через ре- г улируемый упор 21 промежуточной позиции рейку 19, которая поворачивает зубчатое колесо 2, вал 3 и соответственно руку 4 манипулятора по часовой стрелке в позицию II с плавным остановом, который является результатом замедления поршня 12 и рейки 19 в конце хода. При этом в результате поворота зубчатого колеса 2 происходит перемещегше рейки 18. За счет наличия противодавления в цилиндре 5 не происходит дальнейшего перемещения рейки 18, которое может происходить вследствие инерции руки 4, а следовательно, не происходит поворота руки манипулятора. При последующей подаче масла в цилиндр 6 и обеспечении свободного слива масла из цилиндра 5 происходит перемещение поршНя 10 с реГжой 19, вращающей зубчатое колесо 2, перемещающее рейку 18 и регулируемый упор 20.
В хода упор 20, контактируя со сливным отверстием 27 в упоре 22, перекрывает его, и дальнейший слпв масла происходит через щель дросселя 16,расположенного в соединительном фланце 13 (фиг. 7), что обеспечивает зaмe лeниe упора 20 а следовательно, и рейки 18. Далее регулируемый упор 20 промежуточной позипии упирается в ранее выдвинутый упор 22 поршня 11 (фиг. 3-5) за счет наличия давления в цилиндре 7 большего диаметра. При этом происходит поворот руки 4 манипулятора по часовой стрелке в позицию III с плавным остановом, который является результатом замедления рейки 18. Дальнейший поворот руки не происходит за счет разности усилий цилиндра 7 большего диаметра и цилиндра 6 меньшего диаметра.
При последующей подаче масла в цилиндр 6 и обеспечении свободного слива масла из цилиндра 7 происходит дальнейшее перемещение рейки 18, которая своим упором 20 перемещает через упор 22 поршень 11 и упор 23, В конце хода упор 23, контактируя со сливным отверстием 30 в крышке 28, перекрывает его, и дальнейший слив масла происходит через щель дросселя 31, расположенного в крышке 28 (фиг, 8) , что обеспечивает замедление порш- няя 11 в конце хода. Далее упор 23 упирается в регулируемый упор 33 крайней позиции. При этом происходит поворот руки с позиции III в позицию IV с плавным остановом, который является результатом замедления поршня 11 и рейки 18, что завершает полный обо рот руки по часовой стрелке с позиции
Iв позицию IV с последовательными остановами в промежуточных позициях
IIи III, Поворот руки против часовой стрелки с позиции IV в позицию I с последовательными остановами в промежуточных позициях III и II происходит аналогичным образом.
При необходимости поворота руки в любую из четырех позиций в любой последовательности должно быть подано давление в те цилиндры (фиг, 3-6), которые обеспечивают поворот и останов / руки в нужной позиции, как показано
на схеме фиг,2,
Устройство обеспечивает останов ки манипулятора в любой из четырех заданных позиций в любой последовательности и независимо от направле-
5
0
0
ния поворота руки по часовоГ стрелке или против часовой стрелки, что уменьшает вспомогательное время, необхо.. димое для поворота руки манипулятора 5
в заданную позицию и, следовательно
увеличивает технологические возможности и производитель}юсть.
Формула изобретения
Модуль привода манипулятора, содержащий корпус, зубчато-реечную передачу с одним зубчатым колесом и двумя зацепляющимися с ним рейками, связанными каждая с поршнем соответствующего силового цилиндра, а также упоры, отличающийся тем, что, с целью расширения технологических возможностей и повышения производительности, каткдьш силовой цилиндр представляет собой расположенные в едином корпусе вдоль общей оси два штока с поршнями разного диаметра, 5 при этом каждая рейка зубчато-реечной передачи связана с поршнем меньшего диаметра, шток которого снабжен -упором, периодически контактирующим с поверхностью дополнительно выполненного в штоке поршня большего диаметра сливного отверстия, причем этот шток с противоположного конца тоже снабжен упором, периодически контактирующим с поверхностью дополнительного выполненного сливного отверстия в торце цилиндра, при этом поршень большего диаметра снабжен выступом, периодически контактирующим с другими дополнительно выполненными в другом торце цилиндра отяерс:тиями.
0
5
фиг. I
20 oS ffftJ
/ ffS/iew
I
Фиг.
го
Павление
ЦоЛлвиие
v
Ц}if г. 5
Лодлен1/е
Ч.
22 /;
0 Z1 2,12
Фиг.З
0 /1авлен1/е
J
///
Ц)и 1.6
7Д/«
16J7 J5 /
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1992 |
|
RU2022771C1 |
| Манипулятор | 1979 |
|
SU804171A1 |
| Манипулятор | 1989 |
|
SU1673430A1 |
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Манипулятор | 1978 |
|
SU874330A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Автоматический манипулятор | 1980 |
|
SU944918A1 |
| Механизм вращения шпинделя зажимной головки манипулятора | 1978 |
|
SU811588A1 |
| Захватное устройство | 1985 |
|
SU1293021A1 |
Изобретение относится к области машиностроения и может быть использовано в конструкциях приводов манипуляторов. Целью изобретения является расширение технологических возможностей и повышение производительности. В начале работы масло (воздух) подается в цилиндр 8 большего диаметра и в цилиндр 5 меньшего диаметра. За счет разности усилий происходит перемещение поршня 12 большего диаметра. В конце хода выступ 26 поршня 12, контактируя со сливным отверстием 15 во фланце 14, перекрывает его и дальнейший слив масла происходит через дроссель. Это обеспечивает замедление поршня 12 в конце хода. При этом шток-рейка 19 поворачивает зубчатое колесо 2, связанное с валом 3, на котором закреплена рука 4 манипулятора, последняя тоже поворачивается. При подаче масла в другой цилиндр 7 от штока-рейки 18, колеса 2 и вала 3 рука 4 манипулятора поворачивается в другую сторону. Сливные отверстия 15, 27, 30, 34 и контактирующие с ними в определенной последовательности регулируемые упоры и выступы 20-26 управляются по заданной программе и обеспечивают четыре положения руки 4 манипулятора в любой последовательности. 9 ил.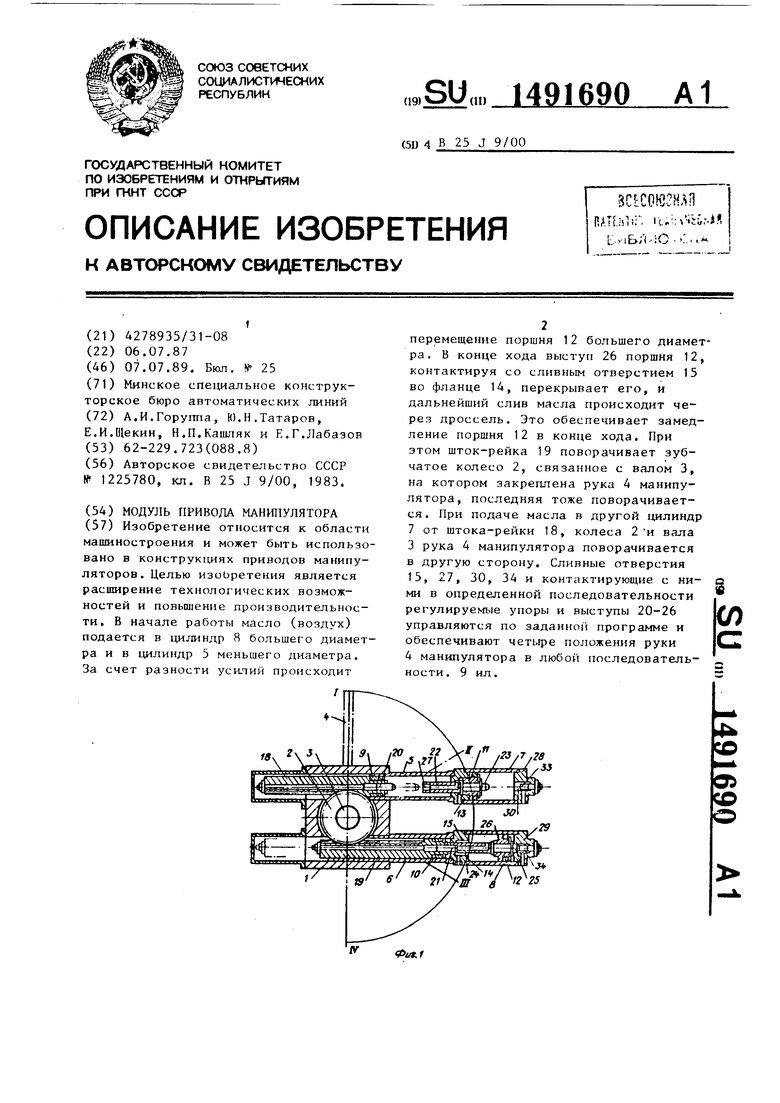
Фиг. 8
Фиг.
фиг. 9
| Модуль привода манипулятора | 1982 |
|
SU1225780A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
