25
го
/ 7 /4
75 г J
фuг.f
ISO
18.
на фиг. 1-3 изображены штампа, прижим-ри.хтователь отрезанная от .ченты
Изобретение относится к машиностроению, а именно к захватам, например для вырубки деталей, и является усовершенствованием захвата по авт. св. № 1284829.
Цель изобретения - повышение надежности закрепления деталей и расширение технологических возможностей захвата за счет ограничения движения нижней губки при закрытом захвате достигается тем, что захват снабжен установленным на верх- ней губке подпружиненным упором.
На фиг. 1 да} захват, продольной разрез; на фиг. 2 - то же, при захвате ленты; на фиг. 3 - то же, после перемещения ленты и отрезки заготовки; на фиг. 4 - промежуточное положение захвата при установке заготовки в штамп и выталкивании находяшейся в штампе готовой детали.
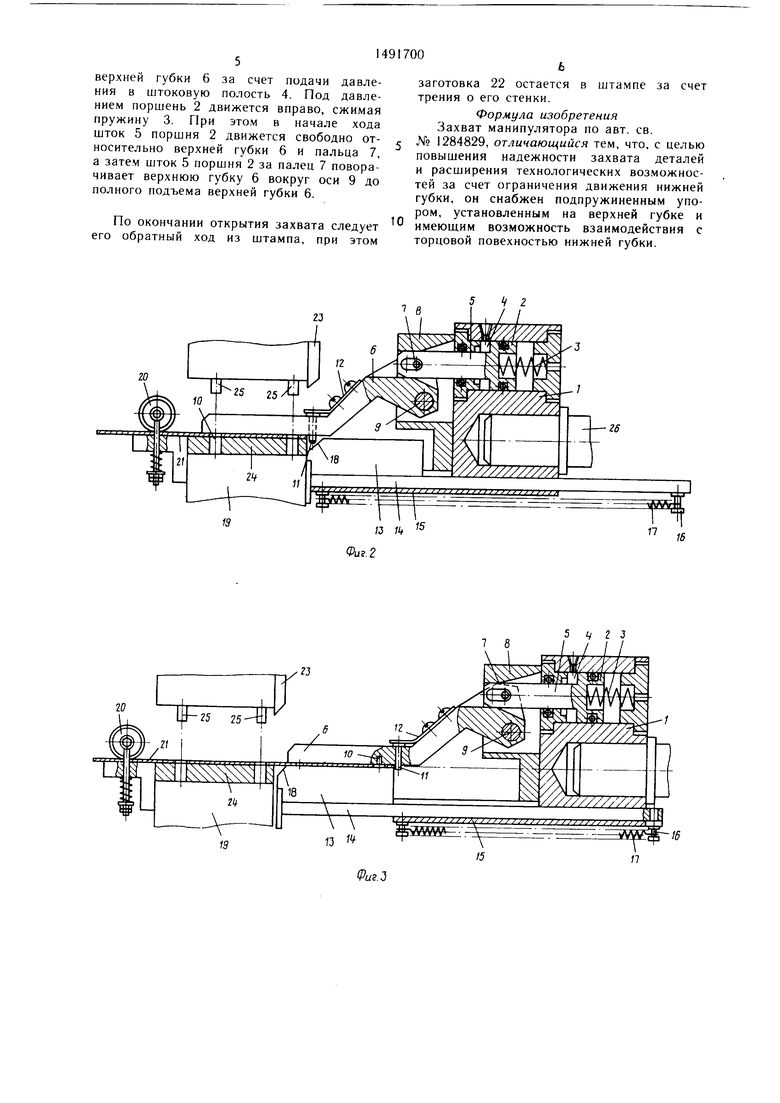
Захват манипулятора состоит из корпуса 1, в котором смонтирован поршень 2 с возвратной пружиной 3 и птоковой по- .тостью 4. Шток 5 поршня 2 связан с верхней губкой 6 посредством пальца 7, проходянхего через продольный laa в штоке 5 пор1иия 2 и закрепленного в верхней губке 6. К корпусу 1 прикреплен упор 8. Верхняя губка 6 шарнирно на оси 9 установлена на упоре 8 и на ее рабочей повер.чности имеются бобьпики 10. На верхней губке 6 также установлен подпружиненный упор 11, прижатый к верхней губ- ке 6 пружиной 12. нижняя губка 13 закреплена на ползуне 14, движущемся в направ- ляюн1,ей основания 15, установлеиног о на кор пусе 1. На ползуне 14 за палец 16 одним концом закрплена пружина другой конец которой закреплен на правляюшей основания 15.
На нижней губке 13 имеется фаска Кроме того, основание 19
20 ленты 21, отрезанная от ленты 21 заготовка 22, отрезной нож 23, матри- па 24 (птампа и вырубные пуансоны 25. 11невмораспреде,1итель (не показан). Тяга 26 предназначена для взаимодействия с механизмом перемещения захвата (не показан). На фиг. 4 показан гибочный штамп 27 и готовая деталь 28.
Захват работает следующим образом.
В исходном состоянии давление нодано в штоковую полость 4 корпуса 1 (фиг. 1), поршень 2 находится в крайнем нравом положении. Ко}щом 5 поршня 2 за палец 7 верхняя губка 6 вместе с у |Ором 11 удерживается в поднятом над нижней губкой 13 положении. Верхняя новерхность губки 13 расположена на одном уровне с матрицей 24 штамна. Нижняя губка 13 с ползуном 14 удерживает- ся в крайнем .:|евом положении нружиной 17 через палец 16, упирающийся в направляющую основания 15.
15
25
Ю
20зо
50 5535
40
45
При верхняя между а нижняя
4
движении захвата губка 6 заходит матрицей 24 и губка
справа налево в пространство пуансонами 25, 13, упершись в основание штампа, заходит в направляющие, при этом ползун 14 растягивает пружину 17.
После окончания этого движения захвата с.чедует сброс давления из штоковой полости 4 корпуса 1, после чего поршень 2 под действием пружины 3 движется влево. Шток 5 поршня 2, упираясь в верхнюю губку 6, поворачивает ее таким образом, что между внутренней поверхностью упора 8 и наружной поверхностью верхней губки 6 образовывается направляющая переменного профиля, по которой шток 5 поршня 2 перемещается дальше и прижимает верхнюю губку 6 к ленте 21. При этом бобышки 10 верхней губки 6 заходят в вырубленные пуансонами 25 технологические отверстия на ленте 21, а упор 11 входит в пространство между основанием 19 штампа и фаской 18 на нижней губке 13 (фиг. 2). Шток 5 поршня 2 проходит по переменной направляющей дальше, заклинивается, что обеспечивает надежное закрытие захвата и исключает возможность его самоотрывания.
В закрытом положении захват начинает движение слева направо. Лента 21 бобышками 10 верхней губки 6 вытягивается точно на заданный шаг из пространства между матрицей 24 и пуансонами 25 на подпружиненную нижнюю губку 13. При этом упор 11 находит на фаску 18 на нижней губке 13, поднимается вверх, отгибая прижимающую его пружину 12. Пройдя фаску 18, упор начинает скользить по рабочей поверхности нижней губки 13 и в конце хода захвата, дойдя до края рабочей поверхности нижней губки 13, сходит с нее под действием пружины 12, тем самым ограничивая движение нижней губки 13. Затем следует рабочий ход пуансонов 25, пробиваются технологические отверстия на ленте 21, а ножом 23 отрезается от ленты 21 заготовка 22. Прижим-рихтователь 20 служит для удержания и рихтовки ленты 21 на матрице 24 после окончания рабочего хода пуансонов 25.
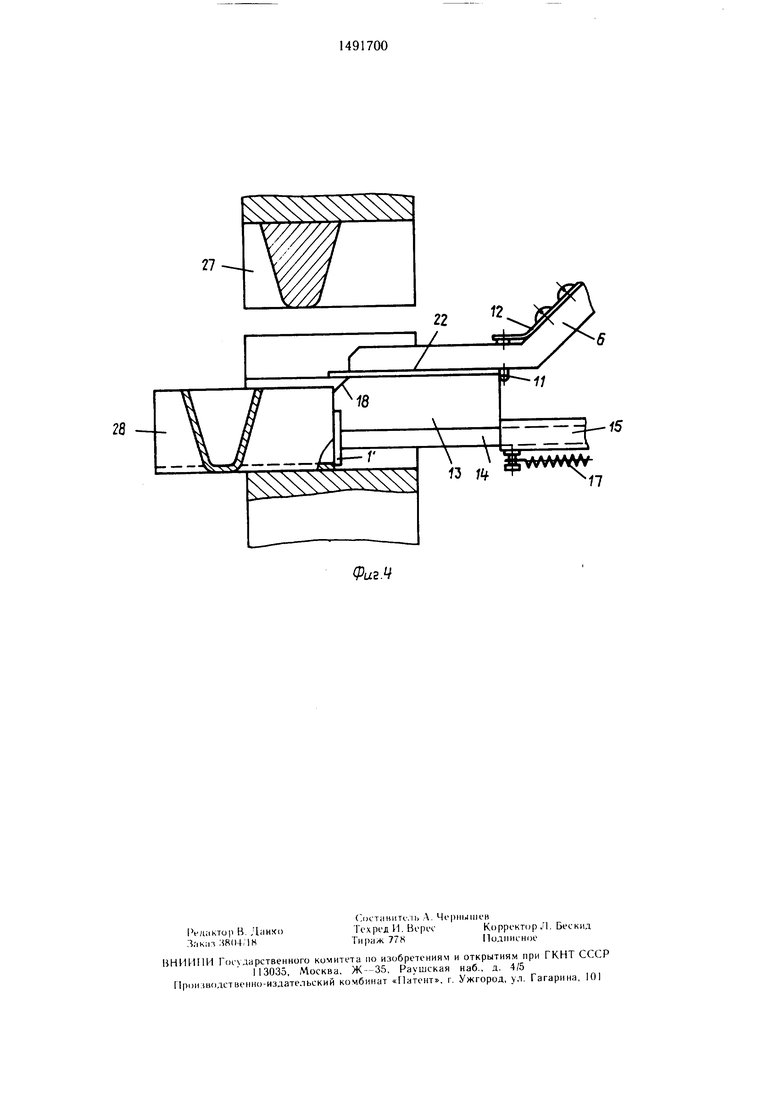
После отрезки заготовка 22 транспортируется к месту следующей операции - в гибочный штамп 27 (фиг. 4). Одновременно с установкой заготовки 22 в гибочный штамп 27 выталкивается находящаяся в штампе 27 готовая деталь 28.
При этом усилие выталкивания готовой детали 28, действующее на нижнюю губку 13, воснринимается упором 11, ограничивающим ее движение.
После захода захвата в 1 ибочный штамп 27 следн т открытие захвата, т. е. подъем
верхней губки 6 за счет подачи давления в штоковую полость 4. Под давлением поршень 2 движется вправо, сжимая пружину 3. При этом в начале хода шток 5 поршня 2 движется свободно относительно верхней губки 6 и пальца 7, а затем шток 5 поршня 2 за палец 7 поворачивает верхнюю губку 6 вокруг оси 9 до полного подъема верхней губки 6.
Формула изобретения Захват манипулятора по авт. св. ,5 № 1284829, отличающийся тем, что, с целью повышения надежности захвата деталей и расширения технологических возможностей за счет ограничения движения нижней губки, он снабжен подпружиненным упором, установленным на верхней губке и По окончании открытия захвата следует имеющим возможность взаимодействия с его обратный ход из штампа, при этомторцовой повехностью нижней губки.
заготовка 22 остается в штампе за счет трения о его стенки.
Формула изобретения Захват манипулятора по авт. св. № 1284829, отличающийся тем, что, с целью повышения надежности захвата деталей и расширения технологических возможностей за счет ограничения движения нижней губки, он снабжен подпружиненным упором, установленным на верхней губке и имеющим возможность взаимодействия с торцовой повехностью нижней губки.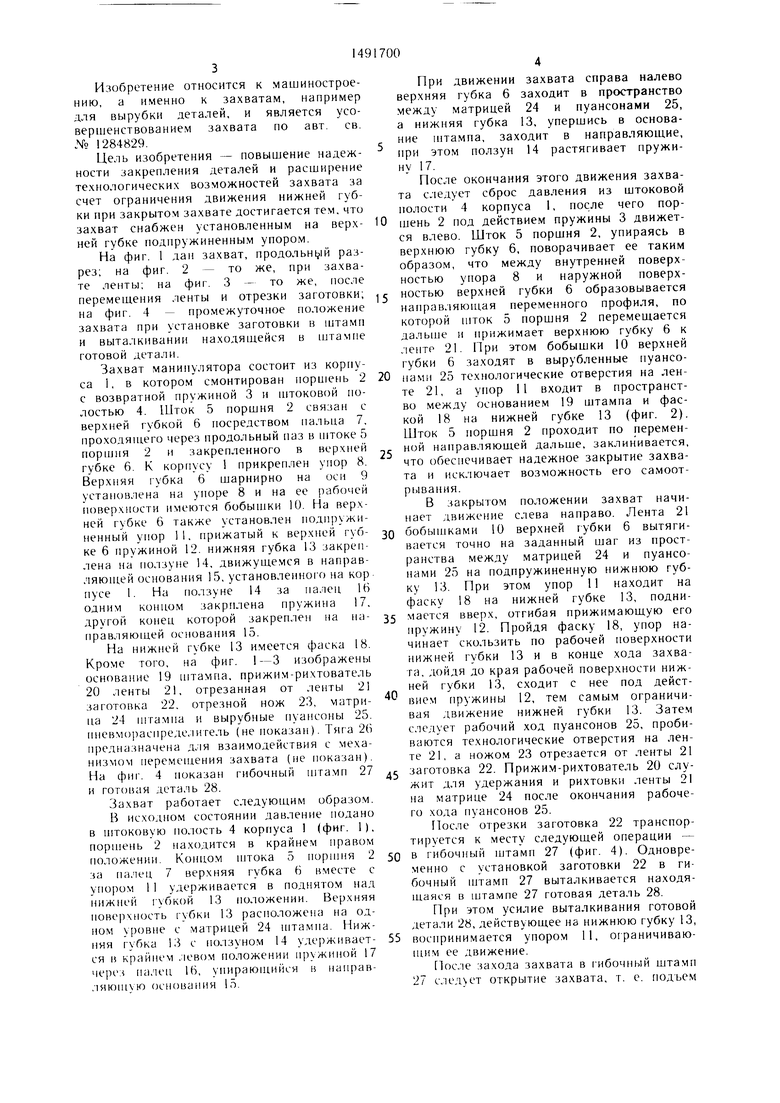
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1985 |
|
SU1284829A1 |
| Штамп для гибки П-образных деталей | 1988 |
|
SU1530297A1 |
| Штамп для изготовления деталей из проволоки гибкой | 1988 |
|
SU1583203A1 |
| Универсально-гибочный автомат с приводом от центральной шестерни | 1984 |
|
SU1245381A1 |
| Автомат для изготовления крюков | 1959 |
|
SU130874A1 |
| Многопозиционный пресс для штамповки деталей | 1988 |
|
SU1542670A1 |
| Штамп для гибки деталей,преимущественно,типа восьмерки | 1985 |
|
SU1304960A1 |
| Устройство для изготовления изогнутых деталей | 1977 |
|
SU733787A1 |
| Комбинированный штамп для изготовления деталей | 1981 |
|
SU986545A2 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ ГИБКИ СТЕРЖНЕВЫХ ЗАГОТОВОК | 2004 |
|
RU2270732C1 |
Изобретение относится к машиностроению, а именно к захватам, например, для вырубки деталей. Цель изобретения - повышение надежности закрепления деталей и расширение технологических возможностей захвата за счет ограничения движения нижней губки при закрытом захвате. Захват выполнен в виде корпуса 1 с шарнирно закрепленной на нем приводной губкой 6. На приводной губке 6 установлен упор 11, подпружиненный пружиной 12. Нижняя губка выполнена в виде подвижной опоры 13, закрепленной на ползуне 14, движущемся в направляющей основания 15, установленного на корпусе 1. На ползуне 14 за палец 16 одним концом закреплена пружина 17, другой конец которой закреплен на направляющей основания 15. Упор 11, взаимодействуя с внутренней торцовой поверхностью нижней губки, препятствует ее перемещению при закрытом положении захвата. Фиксация положения нижней губки позволяет при установке захватом заготовки в гибочный штамп одновременно выталкивать готовую деталь из штампа наружной торцовой поверхностью нижней губки. 4 ил.
ZJ
20
19
13 Ik
П
УS
28
22
12
ьл
г 7
« /if
| Захват манипулятора | 1985 |
|
SU1284829A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
