fO
15
11284829
Изобретение относится к машиностроению, а именно к захватам манипуляторов, например, при вырубке деталей.
Цель изобретения - повышение надежности зажима деталей.
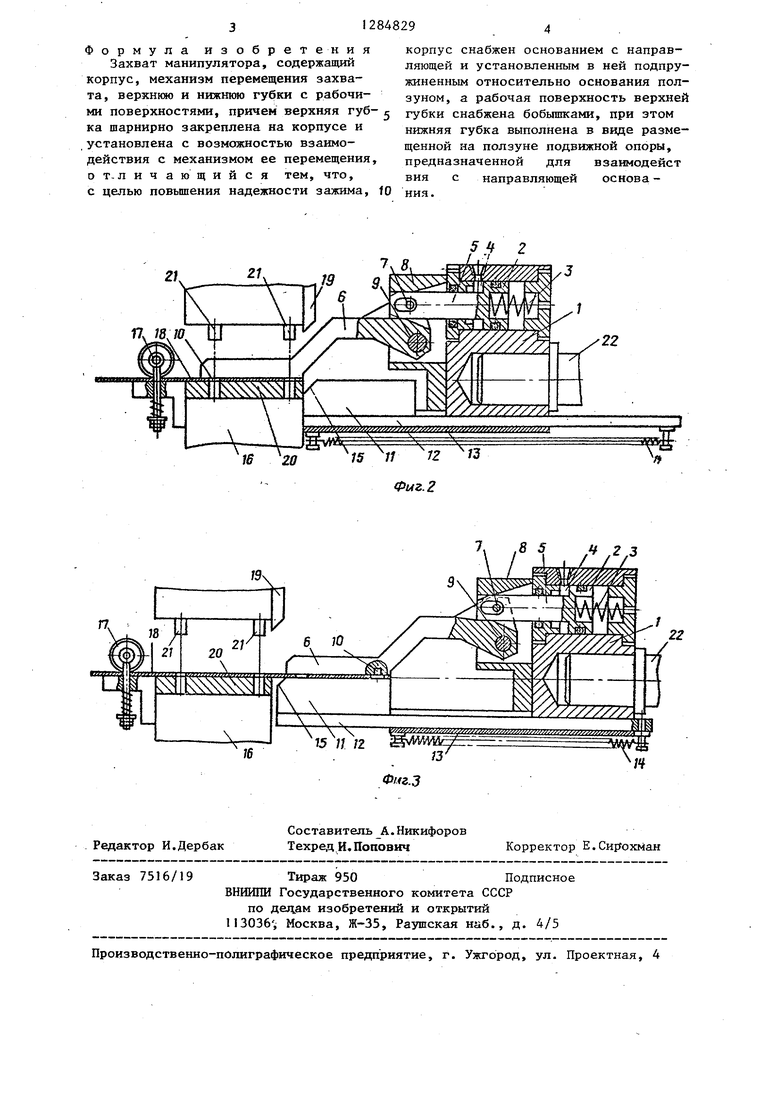
На фиг.1 изображен захват, продольный разрез; на фиг.2 - то же, при захвате детали; на фиг.З - то же, после перемещения детали.
Захват манипулятора состоит из корпуса 1, в котором смонтирован поршень 2 с возвратной пружиной 3 и штоковой полостью 4. Шток 5 поршня 2 связан с верхней губкой 6 посредством пальца 7, проходящего через продольный паз в штоке 5 поршня 2 и закрепленного в верхней губке 6, К корпусу I прикреплен упор 8. Верхняя губка 6 шарнирно на оси 9 установлена на упоре 8 и на ее рабочей поверхности имеются бобьшжи 10. Поршень 2, пружина 3, шток 5, палец 7 и упор 8 образуют механизм перемещения верхней губки 6. Нижняя губка в виде подвижной опоры 11 закреплена на ползуне 12, движущемся в направляющей основания 13, установленного на корпусе 1. На ползуне I2 одним концом закреплена пружина 14,. другой конец которой закреплен , на нап- /равляющей основания 13. На подвижной опоре 1 имеется фаска I5. Кроме того, на фиг.1-3 изображены основание
20.
25
30
опора 11, упершись в основание штампа 16, заходит в направляющие 13, при этом ползун 12 растягивает пружину 14.
После окончания этого движения захвата следует сброс давления из штоковой полости 4 корпуса 1 после чего поршень 2 под действием пружины 3 движется влево. Шток 5 поршня 2, упираясь в верхнюю губку 6, поворачивает ее таким образом, что между внутренней поверхностью упора 8 и наружной поверхностью верхней губки 6 образовывается направляющая переменного профиля, по которой шток 5 поршня 2 перемещается дальше и прижимает верхнюю губку 6 к ленте 18. При этом бобьшпси 10 верхней губки 6 заходят в вырубленные пуансонами 21 технологические отверстия на ленте 18. Шток 5 поршня 2 проходит по переменной направляющей дальше, заклинивается, что обеспечивает надежное закрытие захвата и исключает возможность его самооткрытия.
В закрытом положении захват начинает движение слева направо. Лента 18 бобышками 10 верхней губки 6. вытягивается точно на заданный шаг из пространства между матрицей 20 и пуансонами 21 на подпружиненную подвижную опору 11. Для захода ленты 18 на подвижную опору 11 и возможности ее прогиба при отрезке на подвижной опоА W, п.л tyni n uupaAc ruM и.пих7с1.лпс- -«-
16 штампа, прижим-рихтователь 17 лен- Р имеется фаска 15. Затем следует рабочий ход пуансонов 21, пробиваются технологические отверстия на ленте 18, а ножом 19 отрезается готовая деталь. Прижим-рихтователь 17 служит для удерживания и рихтовки ленты 18 на матрице 20 после окончания рабочего хода пуансонов 21.
ты 18, отрезной нож 19, матрица 20 штампа и вырубные пуансоны 21, пнев- мораспределитель (не показан). Тяга 22 предназначена для взаимодействия с механизмом перемещения захвата (не показан).
Захват манипулятора работает сле- дуняцим образом.
В исходном состоянии давление подано в штоковую полость 4 корпуса I (фиг.1), поршень 2 находится в крайнем правом положении. Концом штока 5 поршня 2 за палец 7 верхняя губка 6 удерживается в поднятом положении. Верхняя поверхность подвижной опоры I1 расположена на одном уровне с матрицей 20 штампа.
Подвижная опора 11 вместе с ползуном 12 удерживается в крайнем левом положении пружиной 14. При движении захвата справа налево верхняя губка 6 заходит в пространство между матрицей 20 и пуансоном 21, а подвижная
5
0.
5
0
опора 11, упершись в основание штампа 16, заходит в направляющие 13, при этом ползун 12 растягивает пружину 14.
После окончания этого движения захвата следует сброс давления из штоковой полости 4 корпуса 1 после чего поршень 2 под действием пружины 3 движется влево. Шток 5 поршня 2, упираясь в верхнюю губку 6, поворачивает ее таким образом, что между внутренней поверхностью упора 8 и наружной поверхностью верхней губки 6 образовывается направляющая переменного профиля, по которой шток 5 поршня 2 перемещается дальше и прижимает верхнюю губку 6 к ленте 18. При этом бобьшпси 10 верхней губки 6 заходят в вырубленные пуансонами 21 технологические отверстия на ленте 18. Шток 5 поршня 2 проходит по переменной направляющей дальше, заклинивается, что обеспечивает надежное закрытие захвата и исключает возможность его самооткрытия.
В закрытом положении захват начинает движение слева направо. Лента 18 бобышками 10 верхней губки 6. вытягивается точно на заданный шаг из пространства между матрицей 20 и пуансонами 21 на подпружиненную подвижную опору 11. Для захода ленты 18 на подвижную опору 11 и возможности ее прогиба при отрезке на подвижной опо- -«-
Р имеется фаска 15. Затем следу
ет рабочий ход пуансонов 21, пробиваются технологические отверстия на ленте 18, а ножом 19 отрезается готовая деталь. Прижим-рихтователь 17 служит для удерживания и рихтовки ленты 18 на матрице 20 после окончания рабочего хода пуансонов 21.
После отрезки деталь транспортируется рукой манипулятора к месту следующей операции или в тару.
Открытие захвата, т.е. подъем верхней губки 6, происходит за счет подачи давления в штоковую полость 4. Под давлением погнпень 2 движется вправо, сж1шая пружину 3. При этом в начале хода шток 5 поршня 2 движет- .ся свободно относительно верхней губки 6 и пальца 7, а затем шток 5 поршня 2 за палец 7 поворачивает верхнюю губку 6 вокруг оси 9 до полного йЬдъ- ема верхней губки 6.
Формула изобрет ей и я
Захват манипулятора, содержащий корпус, механизм перемещения захвата, верхнкяо и нижнюю губки с рабочими поверхностями, причем верхняя губка шарнирно закреплена на корпусе и установлена с возможностью взаимодействия с механизмом ее перемещения от-личающийся тем, что, с целью повьппения надежности зажима,
корпус снабжен основанием с направляющей и установленным в ней подпружиненным относительно основания ползуном, а рабочая поверхность верхней губки снабжена бобышками, при этом нижняя губка выполнена в виде размещенной на ползуне подвижной опоры, предназначенной для взаимодейст БИЯ с направляющей основа - ния.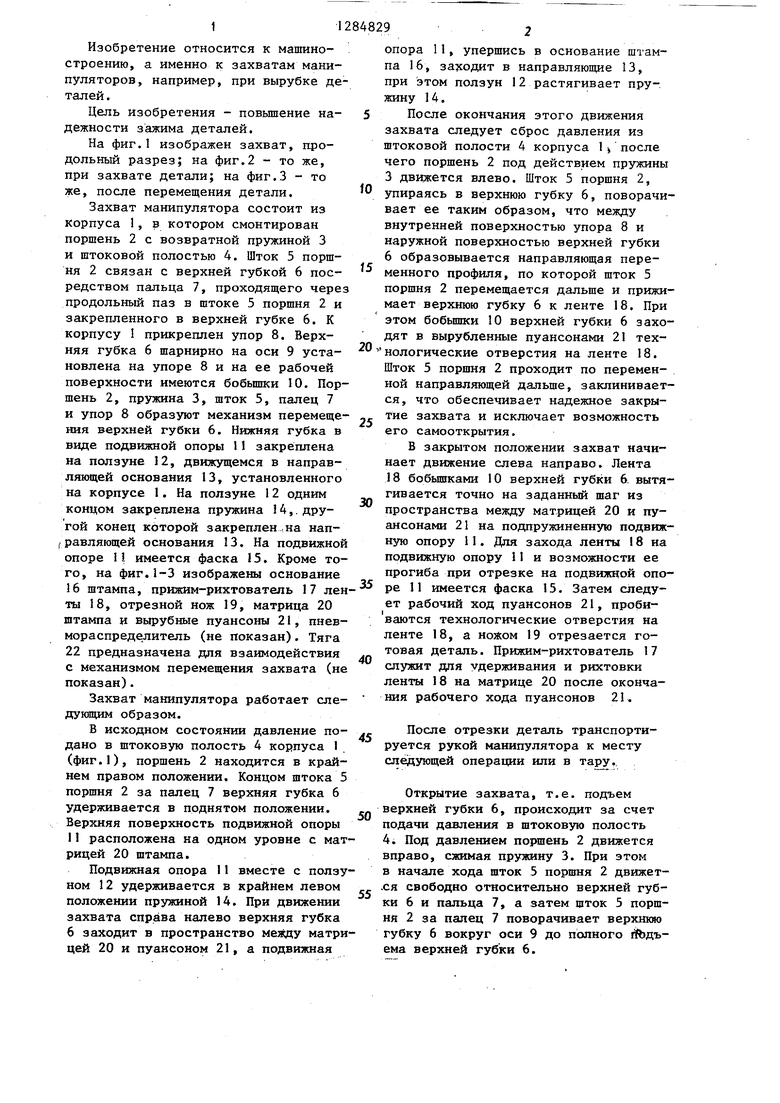
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1987 |
|
SU1491700A2 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ СИЛЬФОНОВ | 1990 |
|
RU2019339C1 |
| Автомат для изготовления деталей из проволоки | 1985 |
|
SU1392733A1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
| Автомат для гидропластической обработки цилиндрических зубчатых колес | 1985 |
|
SU1593974A1 |
| Захват манипулятора | 1990 |
|
SU1757875A1 |
| Многопозиционный пресс для штамповки деталей | 1988 |
|
SU1542670A1 |
| Захватное устройство | 1986 |
|
SU1400876A1 |
| Захватное устройство | 1986 |
|
SU1393627A1 |
| Технологический ротор роторной машины | 1990 |
|
SU1750959A1 |
Изобретение относится к машиностроению, а именно к захватам манипуляторов, например, при вырубке деталей. Изобретение позволяет повысить надежность закрепления деталей. Захват манипулятора вьтолнен в виде корпуса 1 с поршнем 2, шток 5 которого посредством пальца 7 связан с верхней губкой 6, с рабочей поверхностью, снабженной бобышками 10. К корпусу 1 прикреплен упор 8. Поршень 2, шток 5, палец 7 и упор 8 образуют механизм перемещения верхней губки 6. Нижняя губка выполнена в виде подвижной опоры 11, установленной на ползуне 12, перемещающемся в направляющей основания 13. Тяга 22 связана с механизмом перемещения захвата. В ленте 15 посредством вырубных пуансонов 21 перед отрезкой детали выполняются технологические отверстия, в которые входят бобьш1ки 10 верхней губки 6. 3 ил. /5 77 J2 (Л с 00 4 00 J2 1 ,,Щ 13 П Фиг.1
21
/
/9
2J 20
1
76
Л ,83 423
I I . / /V
Редактор И.Дербак
Составитель А.Никифоров Техред И. Попович
Заказ 7516/19Тираж 950Подписное
ВНИИПИ Государственного комитета СССР
по децдм изобретений и открытий 113036, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Е.СирГохМан
| Схват манипулятора | 1977 |
|
SU625918A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
