Изобретение относится машиностронию и может быть использовано при создании работотехнических комплексов.
Целью изобретения является расширение технологических возможностей.
На фиг. t изображен общий вид захвата; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - общий вид захвата с захваченной заготовкой, и имеющей выпуклую форму.
Захват содержит корпус 1с установленными на нем телескопическими звеньями 2, в каждое из которых входит звено 3 в которое в свою очередь входит звено 4. В верхней части звена 2 установлены крышка 5 с отверстием для подвода сжатого воздуха. Снаружи верхней части звеньев 3 и 4 выполнены кольцевые проточки 6, с установленными эластичными оболочками 7, причем ширина ппоточек 6 и оболочек 7 такова, что сила трения каждой оболочкой 7 и сопрягаемым звеном при подводе сжатого воздуха превышает силу давления действующую на это звено, а также силу создаваемую упругостью пружины 8 и силу тяжести части веса детали, приходящегося на это звено.
Проточки б соединены каналами 9 с внутренней полостью. В нижней части звена 4 установлен шаровой шарнир 10, удерживаемый крышкой 11. На шаровом шарнире 10 установлен промежуточный элемента 12 с присоской 13. В промежуточном элементе 12 размещен эжектор 14. содержащий входной канал 15, эжекционную камеру 16 и входной канал 17. Эжекционная камера 16 каналом 18 соединена с полостью присоски 13.
Устройство работает следующим обра- зрм... -; . :Первоначально захват позиционируется на деталь 19, после чего звенья 3 и 4 поднимаются по профилю детали 19, а присоски 13, поворачиваясь на шарнирах 10, плотно прилегают к поверхности детали.
Затем через отверстия в крышках 5 подается сжатый воздух, в результате чего эластичные оболочки 7 раздуваются, фиксируя положение звеньев 3 и 4, Сжатый воздух
проходит через эжектор 14 и в полости присоски 13 создается разрежение, благодаря чему она захватывает деталь 19 и манипулятор переносит ее в требуемое место, где источник сжатого воздуха отключается для
освобождения детали.
Захват предлагаемой конструкции можно применять в стесненных условиях, так как после захвата им детали габариты его не увеличиваются.
Формула изобретения
Захват манипулятора, содержащий корпус, на котором установлены звенья, выполненные в виде втулок и имеющие возможность осевого перемещения параллельно друг другу, при этом на свободном торце каждого звена установлена присоска, рабочая полость которой соединена с источником вакуума, а на наружной боковой поверхности каждого звена в проточке
установлено средство фиксации звена, выполненное в виде эластичной оболочки, образующей с поверхностью звена полость, соединенную посредством внутренней полости звена с источником сжатого воздуха,
о т л и ч а ю щи и с я тем, что, с целью расширения технологических возможностей, каждое звено выполнено телескопическим и подпружинено относительно корпуса, при этом части телескопического
звена имеют возможностью фиксации относительно одна другой посредством дополнительно введенных эластичных оболочек, а каждая присоска установлена на звене шар- мирно, причем-источник вакуума каждой
присоски выполнен в виде эжектора, встроенного в шарнир и соединенного с источником сжатого воздуха посредством внутренней полости соответствующего телескопического звена.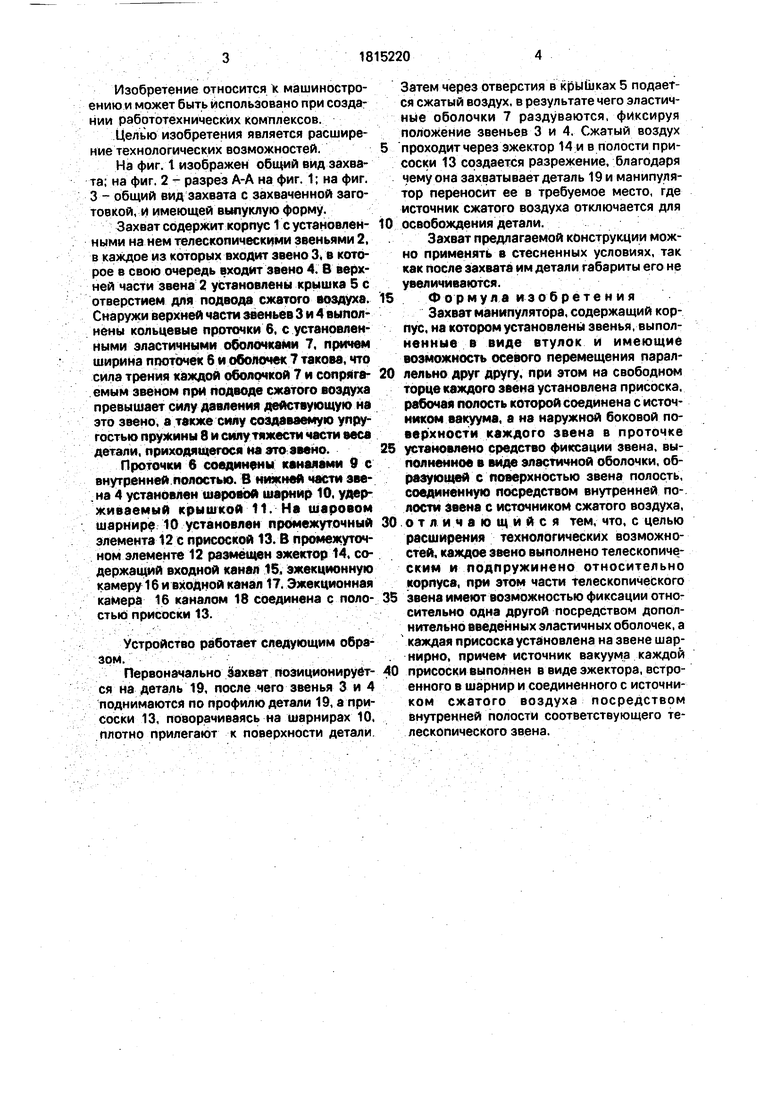
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Пневматический захват | 1979 |
|
SU829536A1 |
| Вакуумный захват | 1987 |
|
SU1440706A1 |
| Вакуумный захват | 1988 |
|
SU1646859A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1139621A1 |
| Мобильное устройство для монтажа и демонтажа вагонных дверей | 2022 |
|
RU2791355C1 |
| Адаптивный вакуумный захват | 1991 |
|
SU1816690A1 |
| Вакуумный схват | 1980 |
|
SU891429A1 |
| Вакуумный схват манипулятора | 1988 |
|
SU1521587A1 |
| Пневматический захват | 1977 |
|
SU632634A1 |
Использование: при создании робото- технических комплексов. Сущность изобретения: захват манипулятора содержит корпус 1 с установленными на нем телескопическими звеньями 2. В верхней части звена 2 установлена крышка 5 с отверстием для подвода сжатого воздуха. Снаружи верхней части звеньев 3 и 4 выполнены кольцевые проточки 6 с установленными эластичными оболочками 7. Проточки 6 соединены каналами 9 с внутренней полостью. В нижней части звена 4 установлен шаровой шарнир 10, удерживаемый крышкой 11. Нэ шаровом шарнире 10. установлен промежуточный элемент 12 с присоской 13. 3 ил.
| Схват манипулятора | 1977 |
|
SU810479A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
