А
i
(Л
4;
со со
00
ел сд
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ротационного выдавливания | 1976 |
|
SU770610A1 |
| Устройство для ротационного выдавливания | 1975 |
|
SU764788A1 |
| Устройство для ротационного выдавливания | 1989 |
|
SU1736660A1 |
| Автооператор | 1979 |
|
SU831516A1 |
| Устройство для накатывания резьбы на пустотелых заготовках | 1976 |
|
SU727289A1 |
| Устройство для подачи заготовок в зону обработки | 1981 |
|
SU1091968A1 |
| Устройство для ротационного выдавливания | 1983 |
|
SU1100027A1 |
| Станок для накатывания резьбы на пустотелых заготовках | 1988 |
|
SU1547930A1 |
| Станок для загибки и отрезки концов трубных спиралей | 1989 |
|
SU1648592A1 |
| Станок для накатывания резьб на пустотелых заготовках | 1986 |
|
SU1470408A1 |
Изобретение относится к обработке металлов давлением и может быть использовано в машинах ротационного выдавливания в части автоматизации их загрузки - выгрузки. Цель изобретения - повышение производительности за счет сокращения циклов загрузки и выгрузки, повышение надежности работы за счет сокращения кинематических связей и повышение качества изделий за счет центрирования заготовки и исключения ее перемещения по промежуточным склизам под действием силы тяжести. Устройство содержит смонтированные на станине переднюю бабку с приводной оправкой, рабочую клеть с деформирующим инструментом и силовыми цилиндрами с прижимными планками, заднюю бабку с прижимной пинолью, приемную призму, лоток загрузки с силовым цилиндром и узлом удержания столба заготовок, нож, выполненный в виде гребенки. Устройство снабжено подвижной плитой, установленной на верхней крышке силового цилиндра лотка загрузки с возможностью перемещения по направляющим и связанной посредством подпружиненного поводка со штоком гидроцилиндра. Подвижная плита, подпружиненный поводок и приемная призма выполнены с пазами. Узел удержания столба заготовок на лотке загрузки имеет отсекатели в виде трехлепестковых выступов под углом 120° между ними. Один из них взаимодействует с пазом подпружиненного поводка, а два остальных - с пазами подвижной плиты. На переднем торце подвижной плиты закреплен нож, взаимодействующий с пазами приемной призмы. Силовые цилиндры с прижимными планками установлены на переднем торце рабочей клети. При этом исключаются передаточные лотки и сводится до минимума количество исполнительных органов. 3 ил.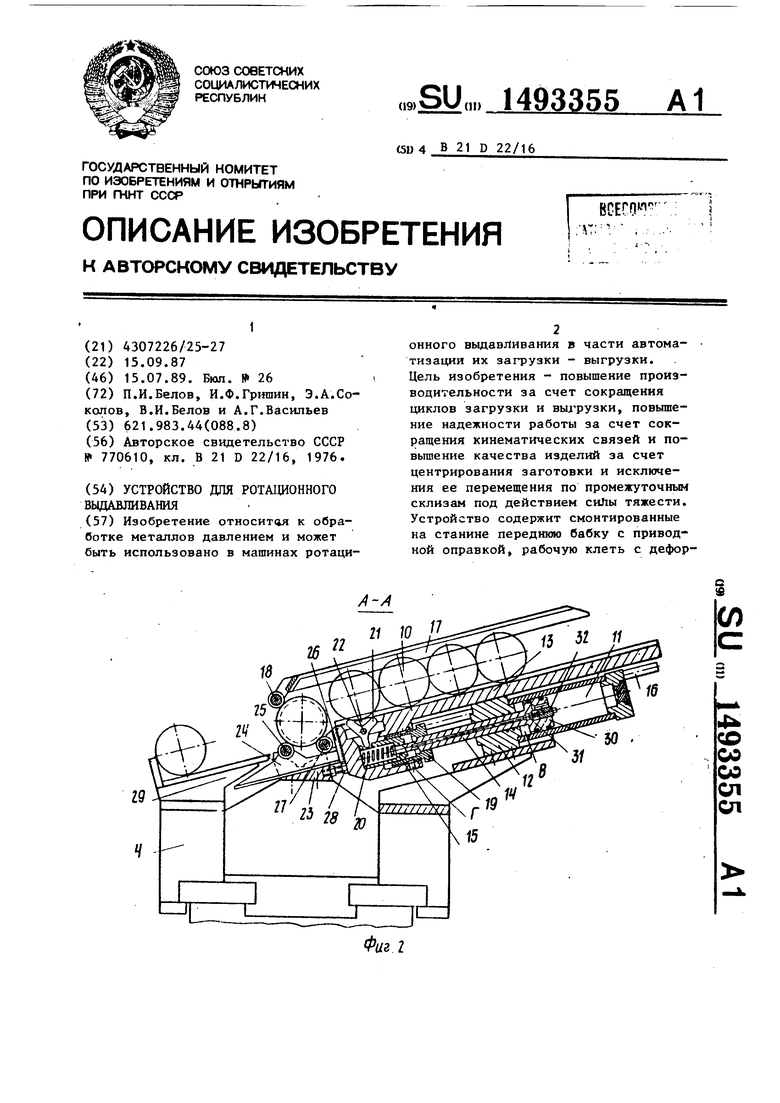
Фиг г
мирующим инструментом и силовыми цилиндрами с пргокимными планками, заднюю бабку с прижимной пинолью, приемную призму, лоток загрузки с силовым цилиндром и узлом удержания столба заготовок, нож, выполненный в виде гребенки. Устройство снабжено подвижной плитой, установленной на верхней крышке силового цилиндра лотка загрузки с возможностью перемещения по направляющим и связанной посредством подпружиненного поводка со штоком гидроцилиндра. Подвижная плита, подпружиненный поводок и приемная призма выполнены с пазами.
Изобретение относится к обработке металлов давлением, в частности к машинам ротационного выдавливания в части автоматизации их загрузки - выгрузки.
Целью изобретения является повы- шение производительности за счет сокращения циклов загрузки и выгрузки, повышение над;ежности работы за счет упрощения кинематических связей и повышение качества изделий за счет центрирования заготовки и исключения ее перемещения по промежуточным склизам под действием сил тяжести.
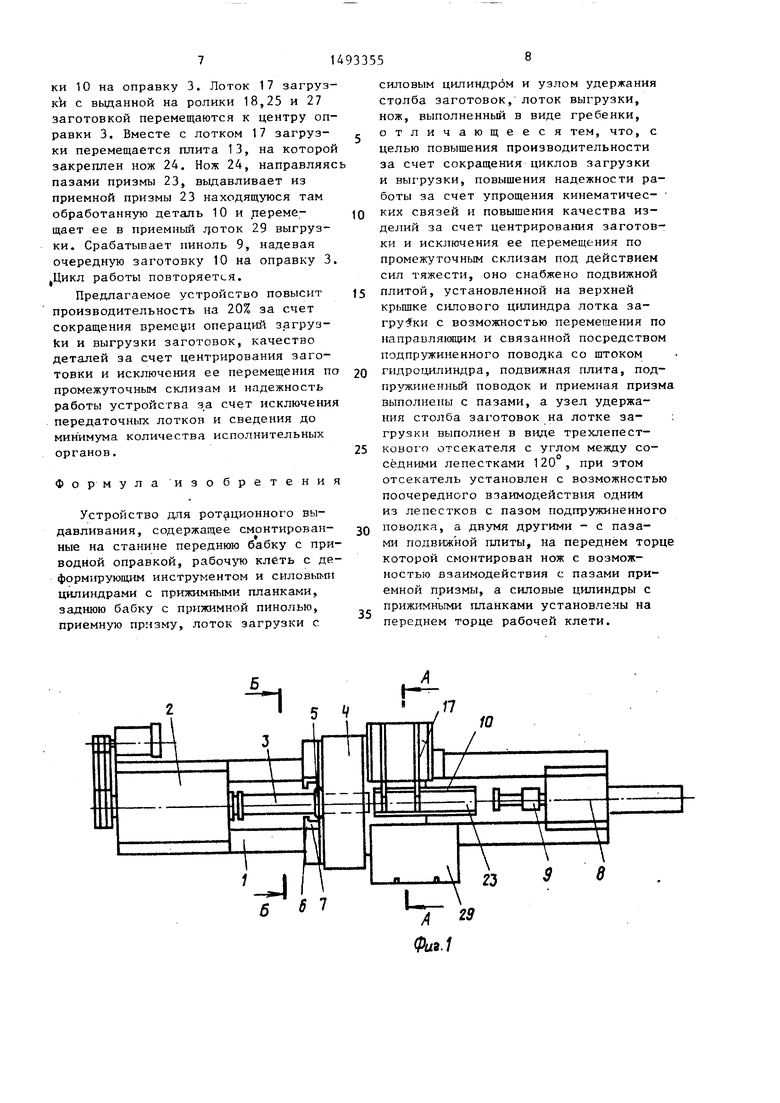
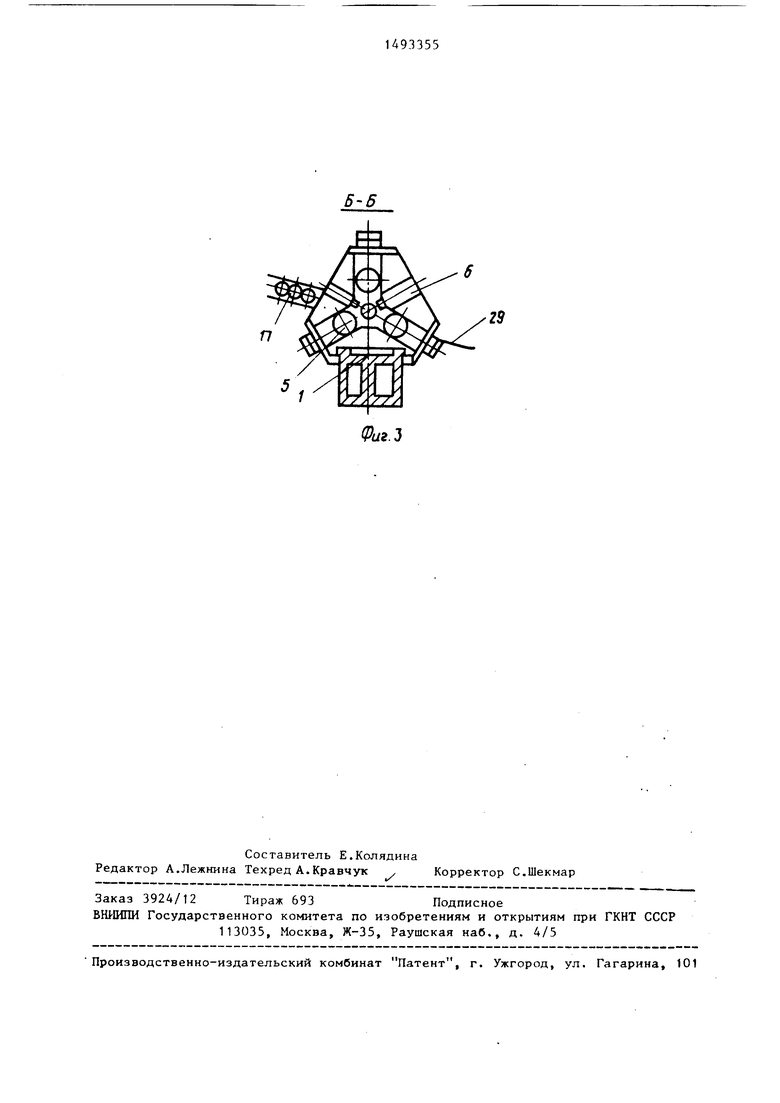
На фиг. 1 изображено предлагаемо устройство; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Устройство состоит из станины 1, на которой смонтированы передняя бабка 2 с приводной оправкой 3, рабочей клети А с деформирующими роликами 5, на переднем торце которой установлены силовые цилиндры 6 съем обработанной детали с оправки прижимными планками 7. На станине 1 неподвижно установлена задняя бабка 8 с вмонтированной в нее подвижной пинолью 9, осуществляющей Подачу и прижим в момент обработки детали 10
Рабочая клеть 4, имеющая возможность продольного перемещения к оправке 3, оснащена силовым цилиндром 11, на передней крышке 12 которого закрегшела плита 13, связанная со штоком 14 поводком 15 и перемещающаяся по направляющим 16. На плите 13 с ко- И|1Ж11остью совместного пере
Узел удержания столба заготовок на лотке загрузки имеет отсекатели в виде трехлепестковых выступов под углом 120 между ними. Один из них взаимодействует с пазом подпружиненного поводка, а два остальных - с пазами подвижной плиты. На переднем торце подвижной плиты закреплен нож, взаимодействующий с пазами приемной призмы. Силовые цилиндры с прижимными планками установлены на переднем торце рабочей клети. При этом исключаются передаточные лотки и сводится до минимума количество исполнительных органов, 3 ил.
0
5
Q
0
5
мещения закреплен лоток 17, снабженный регулируемым роликом 18, Подвижная плита 13 содержит гайку 19. Закрепленный на штоке 14 поводок 15 подпружинен пружиной 20. Поводок 15 имеет паз, взаимодействующий с одним из выступов отсекателя 21, закрепленного на оси 22. На рабочей клети 4 расположена приемная призма 23, снабженная пазами для направления ножа 24, жестко закрепленного на переднем торце крьщ1ки 12 силового щшиндра 11 с возможностью их совместного перемещения. Нож 24 оснащен неподвижным роликом 25, а на торце плиты закреплены кронштейн 26 с возможностью перемещения по треугольным нарезам и ролик 27. Регулировка хода цилиндра 11 и окончательное центрирование изделия 10 по оправке 3 осуществляется упорным винтом 28, установленным на приемной призме 23. Обработанные детали 10 ножом 24 при перемещении цилиндра 11 выдаются на лоток 29 выгрузки, рас- положенньй на рабочей клети 4. Для подвода рабочей жидкости к силовому цилиндру 11 в его поршневую полость шток 14 выполнен с OTBepcifceM, а в поршне 30 смонтирован подпружиненный дроссель 31, настраиваемый винтом 32 на рабочее давление 10 ат.
Устройство работает следующим образом.
Включается схема автоматики, срабатывают гидрораспределители (не показаны; , и рабочая жидкость поступает в штоковую полость В цилиндра 11 и в полость Г под поводок 15. По- нодок 15 сжимает пружину 20 и своим
пазом переводит отсекатель 21 в крайнее левое положение. Лоток 17 загрузки занимает крайнее правое положение, плита 13 перемещается к торцу передней крышки 12, нож 24 выводится из приемной призмы 23. Рабочая клеть 4 с разведенными деформирующими роликами 5 устанавливается в промежуточном положении ближе к передней бабке 2, при котором лоток 17 загрузки максимально приближен к приводной оправке 3. Крайняя первая заготовка 10, уложенная на лоток 17 загрузки, и весь столб заготовок удерживаются одним из выступов трехлепесткового отсекателя 21. Центрирующие ролики 18,25 и 27 предварительно настраивают на прием за- готово-к 10 из загрузочного лотка 17 соосно приводной оправке 3. Подаетс команда на переключение гидрораспределителя, полость Г сообщается со сливом, а штоковая полость В остается под давлением. Поводок 15 пружиной 20 поджимается к торцу регулировочной гайки 19. Отсекатель 21 перекидывается и заготовка 10 скатьтается на ранее сцентрированные ролики 18,25 и 27. Весь оставшийся на лотке 17 загрузки столб заготовок 10 удерживается другим выступом трехлепесткового отсекателя 21. Вновь срабатывает 1 идрораспре- делитель, управляющий работой подвода жидкости в полость Г. Под поводок 15 поступает рабочая жидкость, поводок перемещается влево, сжимая
пружину 20. Отсекатель 21 вновй перекидывается в крайнее левое положение, а заготовки 10 перемещаются по лотку 17 на шаг, удерживаясь первым выступом отсекателя 21. Одновременно срабатывает гидрораспредели- тель, управляющий поступлением рабочей жидкости в полость В. Из што- ковой полости цилиндра 11 снимается давление, в то время как под поводком 15 давление жидкости возрастает и при достижении 15-18 ат сра- батьтает дроссель 31.Жидкость по, каналу в штоке 14 поступает в поршневую полость цилиндра 11. Поршень 30 вместе со штоком 14 и жестко закрепленной на нем плитой 13 начинает перемс чаться к оправке 3. Вместе с плитой 13 перемещается и лоток 17 загрузки и сцентрированная роликами 18,25 и 27 заготовка 10. Заготов0
5
0
ка, подлежащая деформированию устанавливается на оси оправки 3, при зтом торец плиты 13 упирается в цент- ,рирующий упорный винт 28.-Включается привод вращения оправки 3, и пинолью 9, закрепленной в задней бабке 8,
происходит надевание заготовки 10 на вращающуюся оправку 3. После надевания заготовки на оправку происходит поджатие ее торца пинолью 9. Вновь срабатьгоают гидрораспределители. Давление из-под поводка 15 снимается, дроссель 31 перекрывает доступ жидкости под поршень 30. Отсекатель 21 пружиной 20 через паз поводка 15 перекидывается, освобождая очередную заготовку 10 для вьщачи на ролики 18,25 и 27. Рабочая жидкость поступает в штоковую полость цилиндра 11. Поршень 30, шток 14 вместе с плитой 13 и закрепленным . на нем лотком 17 загрузки по направляющим 16 возвращается в исходное
5 правое положение. Очередная заготовка 10 скатывается с лотка 17 на ролики 18, 25 и 27. Рабочая клеть 4 перемещается вправо за торец заготовки 10, подлежащей деформированию. Сводятся деформирующие ролики 5, и рабочая клеть 4 начинает технологическое перемещение к передней бабке 2. Ролики 5 производят операцию ротационного выдавливания. После выполнения технологической операции деформирующие ролики 5 отводятся от обработанной детали, пиноль 9 возвращается в исходное положение и подается команда на перемещение штоков силовых цилиндров 6. Прижимные планки 7 штоками силовых цилиндров 6 перемещаются к оправке 3 за торец обработанной детали 10. Привод вращения оправки 3 выключается, и начи5 нается перемещение рабочей клети 4 от передней бабки 2 вправо; Прижимные планки 7 захватывают деталь 10 за торец и производят ее съем- с оправки. Вместе с рабочей клетью 4 перемещаются жестко закрепленные на . ней лоток 17 загрузки, приемная приз-; ма 23 и лоток 29 выгрузки. Снятая с оправки 3 обработанная деталь 10 прижимается приемной призмой 23. Прижимные планки 7 отводятся, и рабочая клеть 4 с разведенными деформирующими роликами 5 перемещается в промежуточное положение к передней.бабке 2 для загрузки очередной заготов-
0
5
0
0
5
ки 10 на оправку 3. Лоток 17 загруз- Kii с выданной на ролики 18,25 и 27 заготовкой перемещаются к центру оправки 3. Вместе с лотком 17 загрузки перемещается плита 13, на которой закреплен нож 24. Нож 24, направляяс пазами призмы 23, выдавливает из приемной призмы 23 находящуюся там обработанную деталь 10 и перемещает ее в приемный JJOTOK 29 выгрузки. Срабатывает пиноль 9, надевая очередную заготовку 10 на оправку 3. Цикл работы повторяется.
Предлагаемое устройство повысит производительность на 20% за счет сокращения времеуи операций загруз- kи и выгрузки заготовок, качество деталей за счет центрирования заготовки и исключения ее перемещения по промежуточным склизам и надежность работы устройства за счет исключения передаточных лотков и сведения до минимума количества исполнительных органов.
Формула изобретения
Устройство для ротационного выдавливания, содержащее смонтированные на станине переднюю бабку с приводной оправкой, рабоч то клбть с деформирующим инструментом и СИЛОВЬП О
цилиндрами с прижимными планками, заднюю бабку с прижимной пинолью, приемную призму, лоток загрузки с
0
5
0
5
0
5
силовым цилиндром и узлом удержания столба заготовок, лоток выгрузки, нож, выполненный в виде гребенки, отличающееся тем, что, с целью повышения производительности за счет сокращения циклов загрузки и выгрузки, повышения надежности работы за счет упрощения кинематичес- ких связей и повышения качества изделий за счет центрирования заготовки и исключения ее перемещения по промежуточным склизам под действием сил тяжести, оно снабжено подвижной плитой, установленной на верхней крьш1ке ciinoBoro цилиндра лотка за- с возможностью перемещения по направляюшим и связанной посредством подпружиненного поводка со штоком гидрои линдра, подвижная плита, подпружиненный поводок и приемная призма выполнены с пазами, а узел удержания столба заготовок на лотке за- : грузки выполнен в виде трехлепест- кового отсекателя с углом между соседними лепестками 120°, при этом отсекатель установлен с возможностью поочередного взаимодействия одним из лепестков с пазом подпружиненного поводка, а двумя другими - с пазами подвижной плиты, на переднем торце которой смонтирован нож с возможностью взаимодействия с пазами приемной призмы, а силовые цилиндры с прижимными планками установлены на переднем торце рабочей клети.
Составитель Е.Колядина
Редактор А.Лежнина Техред А.Кравчук
Заказ 3924/12 Тираж 693Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Фиг.
Корректор С.Шекмар
| Устройство для ротационного выдавливания | 1976 |
|
SU770610A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
